La fuerza de rozamiento proporcional a la velocidad, Fr
La fuerza debida al efecto Magnus, FL
Las ecuaciones del movimiento de la pelota son
Las condiciones iniciales son
La pelota parte del origen, v0 es la velocidad de disparo y θ es el ángulo de tiro
Despejamos vz de la primera ecuación diferencial y sustituimos en la segunda
La solución particular es una constante C tal que
Para la solución de la ecuación diferencial homogénea, obtenemos las raíces de la ecuación característica
Los coeficientes C1 y C2 son números complejos
Tomando la parte real
La solución completa de la ecuación diferencial en vy es la suma de la solución particular y de la homogénea
Conocida la expresión de vy calculamos vz
Los coeficientes D1 y D2 se calculan a partir de las componentes de la velocidad inicial
Calculamos la posición (y,z) del centro de la pelota en función del tiempo, sabiendo que en el instante t=0, parte del origen
Primero, tenemos que resolver por partes ésta integrales
y ésta otra integral
El resultado es
La posición (y,z) del centro del balón en función del tiempo t
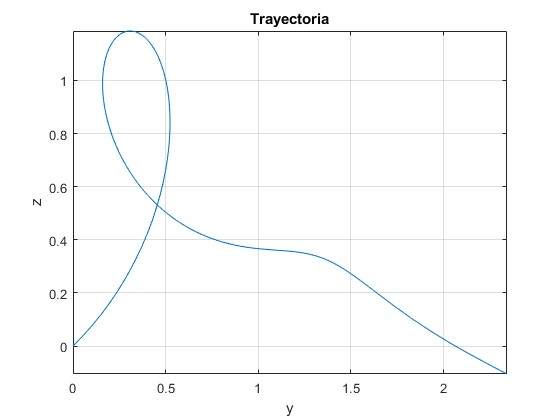
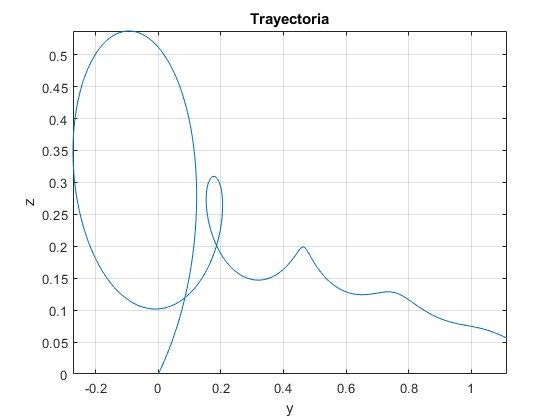
Ejemplos
Velocidad de disparo, v0= 8 m/s
Angulo de tiro, θ= 0.6 rad (34.4°)
Parámetro, μ=0.01
Velocidad angular de rotación, ω=12.56 rad/s
Masa de la pelota, m=0.02 kg
Constante de la fuerza de rozamiento, k=0.05
Aceleración de la gravedad, g=10 m/s2
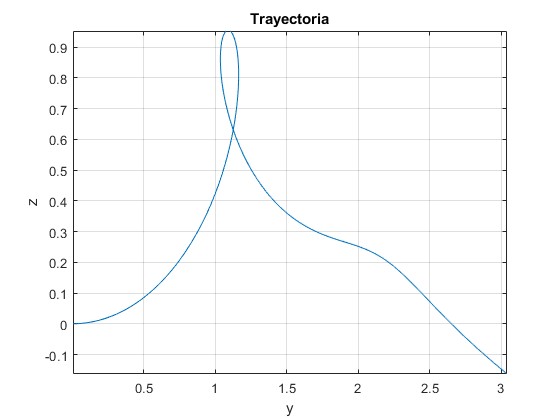
Representamos la trayectoria hasta el tiempo t=2 s
v0=8; %velocidad inicial
th=0.6; %ángulo de tiro
mu=0.01;
w=12.56; %velocidad angular de rotación
m=0.02; %masa
k=0.05;
g=10; %aceleración de la gravedad
A=v0*cos(th)-m*mu*w*g/(mu^2*w^2+k^2);
B=v0*sin(th)+k*m*g/(mu^2*w^2+k^2);
y=@(t) A*k*m*(exp(-k*t/m).*(mu*w*sin(mu*w*t/m)/k-cos(mu*w*t/m))+1)
/(mu^2*w^2+k^2)+B*k*m*(exp(-k*t/m).*(mu*w*cos(mu*w*t/m)/k
+sin(mu*w*t/m))-mu*w/k)/(mu^2*w^2+k^2)+m*mu*w*g*t/(mu^2*w^2+k^2);
z=@(t) -A*k*m*(exp(-k*t/m).*(mu*w*cos(mu*w*t/m)/k+sin(mu*w*t/m))
-mu*w/k)/(mu^2*w^2+k^2)+B*k*m*(exp(-k*t/m).*(mu*w*sin(mu*w*t/m)/k
-cos(mu*w*t/m))+1)/(mu^2*w^2+k^2)-k*m*g*t/(mu^2*w^2+k^2);
fplot(@(t) y(t), @(t) z(t),[0,2])
grid on
xlabel('y')
ylabel('z')
title('Trayectoria')
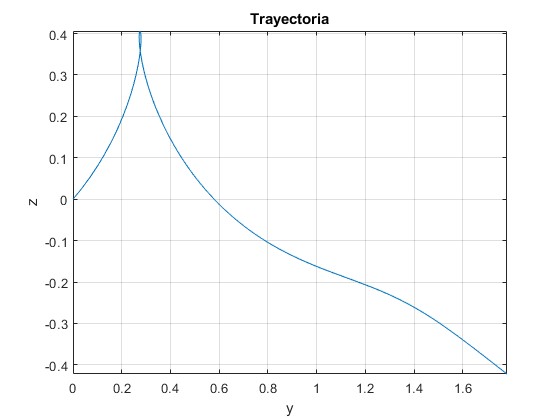
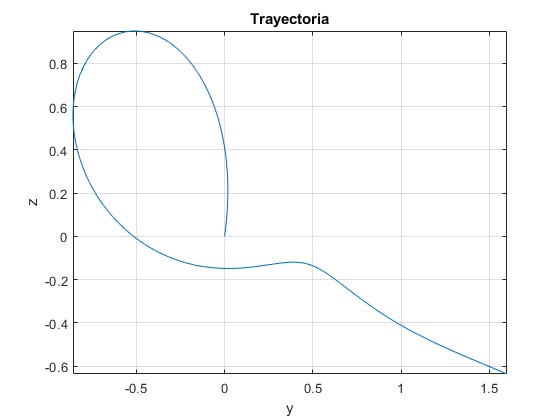
Cambiamos la velocidad de disparo, en el código la variable v0=3.8;. Representamos la trayectoria hasta el tiempo t=1.5 s
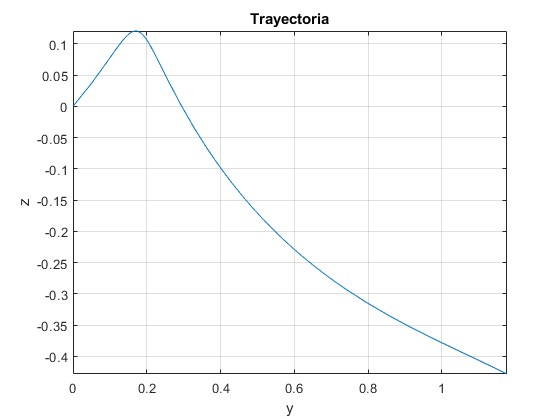
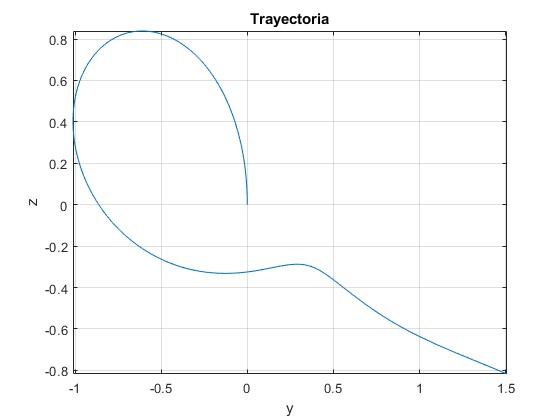
Cambiamos la velocidad de disparo, en el código la variable v0=2;. Representamos la trayectoria hasta el tiempo t=1 s
Cambiamos el ángulo de tiro, en el código la variable th=0; (tiro horizontal) manteniendo la velocidad de disparo v0=8;. Representamos la trayectoria hasta el tiempo t=2 s
Cambiamos el ángulo de tiro, en el código la variable th=pi/2; (tiro vertical) manteniendo la velocidad de disparo v0=8;. Representamos la trayectoria hasta el tiempo t=2 s
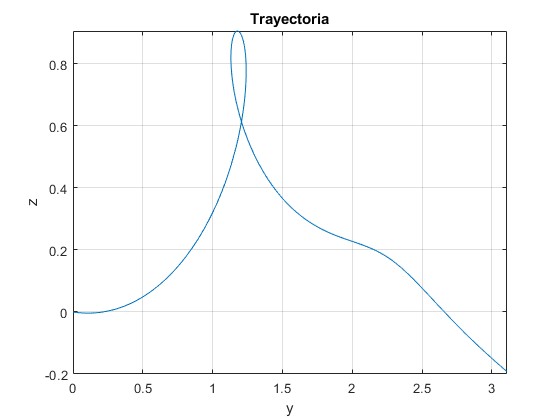
Establecemos un ángulo de tiro tal que el coeficiente A=0, en el código th=acos(m*mu*w*g/(v0*(mu^2*w^2+k^2)));. El ángulo de tiro es θ=1.3981 rad (80.1°)
>> th
th = 1.3981
>> th*180/pi
ans = 80.1066
Establecemos un ángulo de tiro tal que el coeficiente B=0, en el código th=asin(-k*m*g/(v0*(mu^2*w^2+k^2)));. El ángulo de tiro es θ=-0.0685 rad (-3.9°) por debajo de la horizontal
>> th
th = -0.0685
>> th*180/pi
ans = -3.9220
Cambiamos la velocidad de disparo, en el código la variable v0=6;, el ángulo de tiro, la variable th=pi/4; (45°) la velocidad angular de rotación, w=28.26;. Representamos la trayectoria hasta el tiempo t=2 s
>> syms a x;
>> taylor(exp(-a*x),x,0,'order',3)
ans =(a^2*x^2)/2 - a*x + 1
Son las ecuaciones del tiro parabólico
Referencias
HAO Cheng-hong,HUANG Yao-qing,WANG Huan,HONG Yan,LI Zi-jing,DUAN Jun-sheng. The projectile motion of diabolo with air friction. College Physics. 2016, 35 (3):