

Fuerza de rozamiento proporcional al cuadrado de la velocidad (II)
Buscando una solución analítica
Componente vx de la velocidad
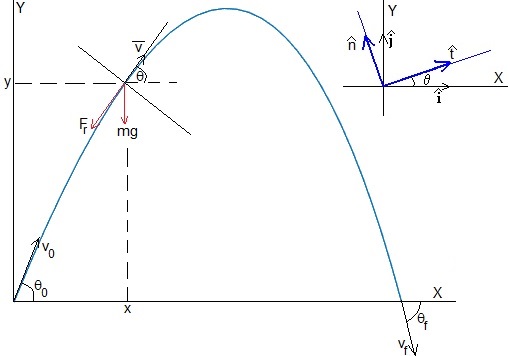
En este apartado, cambiamos de sistema de referencia, y escribimos las ecuaciones del movimiento en la dirección tangencial y en la dirección normal
La relación entre los vectores unitarios (en la parte derecha de la figura) es
La derivada del vector velocidad tiene dos componentes
Las fuerzas sobre el proyectil son
- El peso, mg
- La fuerza de rozamiento Fr=-mbv2 proporcional al cuadrado de la velocidad, cuya dirección es tangencial y sentido contrario al del vector velocidad
La segunda ley de Newton en la dirección tangencial y en la dirección normal, es
La ecuación del movimiento a lo largo del eje X es
Cambiamos la variable tiempo t por la variable ángulo θ, empleando la ecuación del movimiento en la dirección normal
Separamos variables e integramos
La integral del segundo miembro está resuelta en la página titulada Integrales en el apartado 'Integrales de funciones trigonométricas'. El resultado es
con v0x=v0cosθ0
La camponente vy de la velocidad y el módulo v valen
A partir, de la segunda ecuación del movimiento expresamos el tiempo t en función del ángulo θ e integramos
Expresamos la posición (x, y) de la partícula en función del ángulo θ. La posición inicial de la partícula en el instante t=0 es (x0, x0) habitualmente, el origen (0, 0)
El alcance y el tiempo de vuelo se obtienen cuando el proyectil llega al suelo, y=0. Se calcula el ángulo final θf resolviendo la ecuación transcendente
Una vez conocido el ángulo θf, se calcula el alcance R, el tiempo de vuelo, T y la velocidad final de la partícula
Ejemplo
Se dispara un proyectil con velocidad v0=60 m/s, haciendo un ángulo θ0=π/4 (45°). El coeficiente mb=0.0025 kg/m.
Calculamos el alcance, altura máxima y tiempo de vuelo sin rozamiento (tiro parabólico). Representamos la trayectoria parabólica
Resolvemos el sistema de dos ecuaciones diferenciales por procedimientos numéricos y representamos la trayectoria del proyectil bajo la acción de una fuerza de rozamiento proporcional al cuadrado de la velocidad. Cuando y=0 se interrumpe el proceso de cálculo. Mostramos los valores de las variables
- Tiempo de vuelo,
t(end) - Alcance,
x(end,1) - Componente vx de la velocidad,
x(end,2) - Componente vy de la velocidad,
x(end,4)
Resolvemos la ecuación transcendente y=0 que nos permite calcular el ángulo final θf que hace el vector velocidad con el eje X. Con este valor, calculamos el tiempo de vuelo, el alcance y la altura máxima, utilizando la función
function cuadrado
th_0=pi/4; %ángulo de tiro (45)
v0=60.0; %velocidad de disparo
%tiro parabólico
H0=v0^2*sin(th_0)^2/(2*9.8); %altura máxima
R0=v0^2*sin(2*th_0)/9.8; %alcance
T0=2*v0*sin(th_0)/9.8; %tiempo de vuelo
hold on
fplot(@(t) v0*cos(th_0)*t,@(t) v0*sin(th_0)*t-4.9*t.^2, [0,T0])
%rozamiento proporcional al cuadrado de la velocidad
b=0.0025; %rozamiento
v0x=v0*cos(th_0);
vx=@(x) 1./sqrt(1/v0x^2-b*(sin(x)./cos(x).^2+log(tan(x)+1./cos(x))
-sin(th_0)/cos(th_0)^2-log(tan(th_0)+1/cos(th_0)))/9.8);
v=@(x) vx(x)./cos(x);
f=@(x) (v(x).^2).*tan(x);
g=@(y) integral(f,th_0,y);
th_f=fzero(g,[-pi*80/180, th_0-eps]);
hMax=-integral(f,th_0,0)/9.8; %altura máxima
f=@(x) v(x)./cos(x);
tVuelo=-integral(f,th_0,th_f)/9.8; %tiempo de vuelo
f=@(x) v(x).^2;
xMax=-integral(f,th_0,th_f)/9.8; %alcance
fprintf('altura máxima %2.1f (%2.1f), alcance %3.1f (%3.1f),
tiempo de vuelo %1.2f (%1.2f), (vx=%2.2f, vy=%2.2f)\n', hMax, H0,
xMax, R0, tVuelo, T0, vx(th_f), vx(th_f)*tan(th_f));
%sistema de dos ecuaciones diferenciales
fg=@(t,x)[x(2);-b*sqrt(x(2)^2+x(4)^2)*x(2); x(4);
-9.8-b*sqrt(x(2)^2+x(4)^2)*x(4)];
opts=odeset('events',@stop_proyectil);
[t,x]=ode45(fg,[0,10],[0,v0*cos(th_0),0,v0*sin(th_0)], opts);
plot(x(:,1),x(:,3)) %trayectoria
fprintf('tiempo de vuelo %1.2f, alcance %3.1f, (vx=%2.2f, vy=%2.2f) \n',
t(end), x(end,1), x(end,2),x(end,4));
hold off
grid on
xlabel('x')
ylabel('y')
title('Fuerza de rozamiento proporcional al cuadrado de la velocidad')
function [detect,stopin,direction]=stop_proyectil(~,x)
detect=x(3);
stopin=1;
direction=-1;
end
end
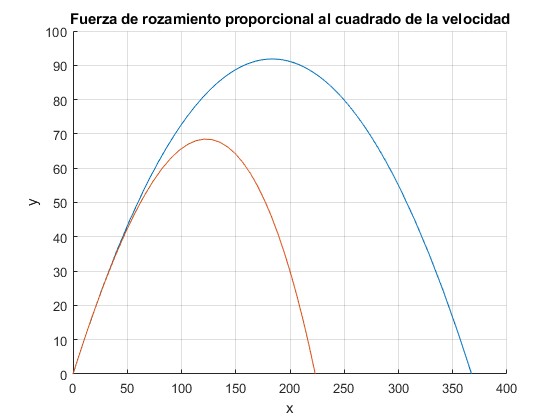
altura máxima 68.5 (91.8), alcance 223.3 (367.3), tiempo de vuelo 7.45 (8.66), (vx=21.55, vy=-32.74) tiempo de vuelo 7.45, alcance 223.3, (vx=21.55, vy=-32.74)
Comparación con el tiro parabólico
| Con rozamiento | Sin rozamiento | |
|---|---|---|
| Tiempo de vuelo (s) | 7.45 | 8.66 |
| Alcance (m) | 223.3 | 367.3 |
| Altura máxima (m) | 68.5 | 91.8 |
Los resultados que se obtienen resolviendo el sistema de dos ecuaciones diferenciales del movimiento, (tiempo de vuelo, alcance, y componenentes vx y vy de la velocidad), son similares por los dos procedimientos
Energías
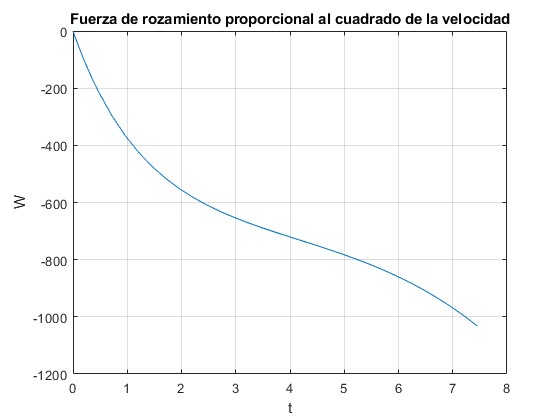
El trabajo de la fuerza de rozamiento modifica la energía del proyectil
Utilizando el ejemplo anterior, comprobamos el balance energético, el trabajo de la fuerza de rozamiento W=-1031.87 J, es igual a la diferencia entre la energía final y la inicial,
Resolvemos el sistema de dos ecuaciones diferenciales por procedimientos numéricos y representamos el trabajo de la fuerza de rozamiento (diferencia entre la energía en el instante t y la inicial t=0, del proyectil) en función del tiempo
function cuadrado_3
th_0=pi/4; %ángulo de tiro (45)
v0=60.0; %velocidad de disparo
%rozamiento proporcional al cuadrado de la velocidad
b=0.0025; %rozamiento
v0x=v0*cos(th_0);
vx=@(x) 1./sqrt(1/v0x^2-b*(sin(x)./cos(x).^2+log(tan(x)+
1./cos(x))-sin(th_0)/cos(th_0)^2-log(tan(th_0)+1/cos(th_0)))/9.8);
v=@(x) vx(x)./cos(x);
f=@(x) (v(x).^2).*tan(x);
g=@(y) integral(f,th_0,y);
th_f=fzero(g,[-pi*80/180, th_0-eps]);
%balance energético
E0=v0^2/2;
Ef=v(th_f)^2/2;
f=@(x) (v(x).^4)./cos(x);
Wf=b*integral(f,th_0,th_f)/9.8;
fprintf('Energía inicial %2.1f, final %3.1f, Trabajo %1.2f\n',E0, Ef, Wf);
%solución numérica
fg=@(t,x)[x(2);-b*sqrt(x(2)^2+x(4)^2)*x(2); x(4);
-9.8-b*sqrt(x(2)^2+x(4)^2)*x(4)];
opts=odeset('events',@stop_proyectil);
[t,x]=ode45(fg,[0,10],[0,v0*cos(th_0),0,v0*sin(th_0)], opts);
W=9.8*x(:,3)+(x(:,2).^2+x(:,4).^2)/2-v0^2/2;
plot(t,W) %Trabajo de la fuerza de rozamiento
grid on
xlabel('t')
ylabel('W')
title('Fuerza de rozamiento proporcional al cuadrado de la velocidad')
function [detect,stopin,direction]=stop_proyectil(~,x)
detect=x(3);
stopin=1;
direction=-1;
end
end
Energía inicial 1800.0, final 768.1, Trabajo -1031.87
Módulo de la velocidad v
En este apartado, cambiamos de sistema de referencia, y escribimos las ecuaciones del movimiento en la dirección tangencial y en la dirección normal
donde ρ es el radio de curvatura de la trayectoria.
En el intervalo de tiempo comprendido entre t y t+dt, la dirección del vector velocidad cambia un ángulo dθ, que es el ángulo entre las tangentes o entre las normales. El móvil se desplaza en este intervalo de tiempo un arco ds=ρ·dθ, tal como se aprecia en la figura.
Hemos de tener en cuenta que la curvatura de la trayectoria es negativa (figura de la derecha). La curva queda a la derecha de la tangente tomada en sentido de las x crecientes. La igualdad anterior se escribe para este caso
Las ecuaciones del movimiento en la dirección tangencial y en la dirección normal se convierten en una única ecuación diferencial de primer orden.
Haciendo el cambo de variable u=1/v2
Esta ecuación es del tipo lineal (véase Puig Adam P., Curso teórico-práctico de Ecuaciones Diferenciales aplicado a la Física y Técnica. Biblioteca Matemática, 1970. págs. 29-30)
Buscamos una solución de la forma u=w(θ)·z(θ)
Hacemos que
La integral se calcula fácilmente
Nos queda ahora que
Integramos por partes
Resolvemos esta última integral haciendo el cambio de variable t=tan(θ/2)
De este modo,
Hemos utilizado la relación trigonométrica
Finalmente,
Se calcula la constante de integración C2 a partir de las condiciones iniciales: en el instante t=0, la velocidad de disparo es v0 y hace un ángulo θ0 con la horizontal (véase la figura más abajo)
La función que relaciona el módulo de la velocidad v y el ángulo θ, que forma la dirección de la velocidad (tangente a la trayectoria) con la horizontal es
La altura máxima (del vértice de la trayectoria) se obtiene para θ=0, la velocidad cuya dirección es horizontal vale, entonces
Posición del proyectil
dx=ds·cosθ=ρdθ·cosθ
Utilizando la ecuación del movimiento en la dirección normal, y teniendo en cuenta que la trayectoria tiene curvatura negativa
Del mismo modo
dy=ds·sinθ=ρdθ·sinθ
Donde (x0, y0) es la posición inicial, normalmente el origen
La altura máxima se obtiene para θ=0
Tiempo de vuelo
ds=v·dt
ρdθ= v·dt
Alcance
Calculamos el ángulo θf final que
forma la dirección de la velocidad cuando y=0, resolviendo la ecuación trascendente mediante
Conocido el ángulo final θf se
calcula el alcance R=x-x0 y el tiempo de vuelo T, calculando
las integrales por el procedimiento numérico
Ejemplo
Se dispara un proyectil con velocidad v0=60 m/s, haciendo un ángulo θ0=π/4 (45°). El coeficiente mb=0.0025 kg/m. Calculamos
- el alcance, R
- el tiempo de vuelo, T
- la altura máxima, H
- el ángulo final, θf
- la velocidad final, vf
th_0=45*pi/180; %ángulo de tiro
v0=60.0; %velocidad de disparo
%rozamiento proporcional al cuadrado de la velocidad
b=0.0025;
h=@(x) tan(x)./cos(x)+log(abs(tan(x)+1./cos(x)));
%inversa de v^2
inv_v2=@(x) (cos(x).^2).*(1.0/(v0*cos(th_0))^2-b*(h(x)-h(th_0))/9.8);
f=@(x) -tan(x)./(9.8*inv_v2(x));
g=@(y) integral(f,th_0,y);
th_f=fzero(g,[-pi*80/180, th_0-eps]);
hMax=integral(f,th_0,0);
f=@(x) -1./(9.8*inv_v2(x));
xMax=integral(f,th_0,th_f);
f=@(x) -1./(9.8*cos(x).*sqrt(inv_v2(x)));
tVuelo=integral(f,th_0,th_f);
fprintf('Exacta: altura máxima %2.1f, alcance %3.1f, tiempo de vuelo %1.2f,
ángulo final %2.1f, velocidad final %2.2f\n', hMax, xMax, tVuelo,
th_f*180/pi, 1/sqrt(inv_v2(th_f)))
Exacta: altura máxima 68.5, alcance 223.3, tiempo de vuelo 7.45, ángulo final -56.6, velocidad final 39.20
Obtenemos los mismos resultados que en el primer apartado
Fórmulas analíticas aproximadas
Existen fórmulas que nos proporcionan, el alcance, la altura máxima el tiempo de vuelo, etc, con gran precisión, véase el ártículo de Chudinov
| Magnitud | Tiro parabólico (Fr=0) | Rozamiento (Fr=mb·v2) |
|---|---|---|
| Altura máxima |
|
|
| Tiempo de vuelo |
|
|
| Velocidad en el vértice |
|
|
| Alcance |
|
|
| Abscisa del vértice |
|
|
| Instante en el vértice |
|
|
| Angulo final |
|
|
| Velocidad final |
|
|
| Ecuación de la trayectoria |
|
|
Cuando b=0 (sin rozamiento), las fórmulas de la tercera columna se convierten en las fórmulas de la segunda columna
Ejemplo
Se dispara un proyectil con velocidad v0=60 m/s, haciendo un ángulo θ0=π/4 (45°). El coeficiente mb=0.0025 kg/m. Calculamos
- el alcance, R
- el tiempo de vuelo, T
- la altura máxima, H
- el ángulo final, θf
- la velocidad final, vf
con las fórmulas analíticas aproximadas de la tercera columna de la tabla y las comparamos con los obtenidos resolviendo el sistema de dos ecuaciones diferenciales por el procedimiento
function cuadrado_4
b=0.0025; %parámetro
th_0=pi/4; %ángulo de tiro (45)
v0=60; %velocidad de disparo
%solución analítica aproximada
hMax=v0^2*sin(th_0)^2/(2*9.8+b*v0^2*sin(th_0)); %altura máxima
tVuelo=2*sqrt(2*hMax/9.8); %tiempo de vuelo
va=v0*cos(th_0)/sqrt(1+b*v0^2*(sin(th_0)+cos(th_0)^2*
log(tan(th_0/2+pi/4)))/9.8);
xMax=va*tVuelo; %alcance
xa=sqrt(xMax*hMax/tan(th_0));
th_f=-atan(xMax*hMax/(xMax-xa)^2);
%inversa de v^2
h=@(x) tan(x)./cos(x)+log(abs(tan(x)+1./cos(x)));
inv_v2=@(x) (cos(x).^2).*(1.0/(v0*cos(th_0))^2-b*(h(x)-h(th_0))/9.8);
fprintf('Analítica aprox.: altura máxima %2.1f, alcance %3.1f,
tiempo de vuelo %1.2f, ángulo final %2.1f, velocidad final %2.2f\n', hMax,
xMax, tVuelo, th_f*180/pi, 1/sqrt(inv_v2(th_f)))
%solución numérica
% x(1) es x, x(2) es dx/dt, x(3) es y, x(4) es dy/dt
fg=@(t,x)[x(2);-b*sqrt(x(2)^2+x(4)^2)*x(2); x(4);
-9.8-b*sqrt(x(2)^2+x(4)^2)*x(4)];
opts=odeset('events',@stop_proyectil);
hold on
[t,x]=ode45(fg,[0,10],[0,v0*cos(th_0),0,v0*sin(th_0)], opts);
plot(x(:,1),x(:,3)) %trayectoria
fprintf('Numérica: alcance %3.1f, tiempo de vuelo %1.2f, ángulo final %2.1f,
velocidad final %2.2f\n', x(end,1), t(end), atan(x(end,4)/x(end,2))*180/pi,
sqrt(x(end,4)^2+x(end,2)^2))
f=@(x) hMax*x.*(xMax-x)./(xa^2+(xMax-2*xa)*x);
fplot(f,[0,xMax])
hold off
grid on
legend('numérica','analítica','location','best')
xlabel('x')
ylabel('y')
title('Fuerza de rozamiento proporcional al cuadrado de la velocidad')
function [detect,stopin,direction]=stop_proyectil(~,x)
detect=x(3);
stopin=1;
direction=-1;
end
end
Analítica aprox.: altura máxima 69.3, alcance 222.7, tiempo de vuelo 7.52, ángulo final -57.9, velocidad final 39.89 Numérica: alcance 223.3, tiempo de vuelo 7.45, ángulo final -56.6, velocidad final 39.20
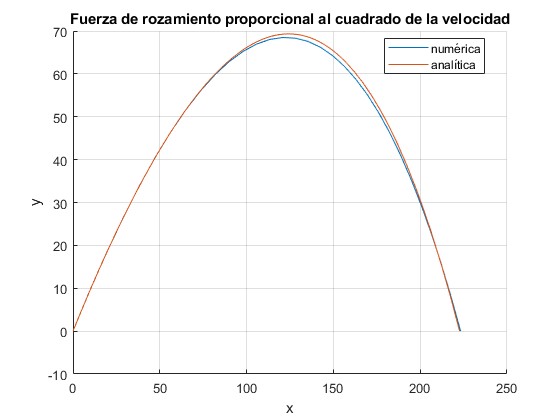
Recogemos en la tabla, la solución 'exacta', la numérica y la analítica aproximada
| 'Exacta' | Numérica | Analítica aprox. | |
|---|---|---|---|
| Tiempo de vuelo (s) | 7.45 | 7.45 | 7.52 |
| Alcance (m) | 223.3 | 223.3 | 222.7 |
| Altura máxima (m) | 68.5 | 69.3 | |
| Angulo final (°) | -56.6 | -56.6 | -57.9 |
| Velocidad final (m/s) | 39.20 | 39.20 | 39.89 |
'Exacta' se refiere al cálculo de las magitudes (tiempo de vuelo, alcance, altura máxima) integrando numéricamente, mediante
integral de MATLAB. El ángulo final, se obtiene mediantefzero de MATLAB-
Numérica, se refiere a la solución numérica del sistema de dos ecuaciones diferenciales, mediante
ode45 de MATLAB Analítica aprox., se refiere al cálculo de dichas magnitudes de acuerdo con fórmulas de la tercera columna de la tabla
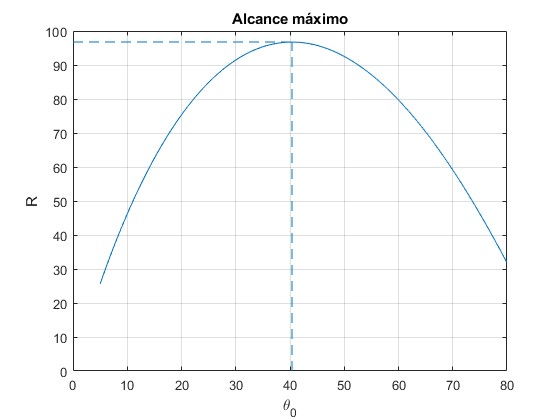
Alcance máximo
Las expresiones analíticas aproximadas nos permiten calcular el ángulo de tiro θ0 (en adelante θ) para el cual el alcance R es máximo
Para calcular el máximo de la expresión, no es necesario completar la derivada respecto de θ de un cociente, tal como se indica
En la larga expresión es necesario calcular en dos ocasiones la derivada de
La derivada de R respecto de θ, es una larga expresión
Simplificando, obtenemos la ecuación trascendente
En el siguiente script, establecemos la velocidad inicial v0=40 m/s, y el coeficiente mb=0.000625·9.8 kg/m.
- Representamos el alcance en función del ángulo de tiro θ0
- Resolvemos la ecuación trascendente para calcular el ángulo θm=40.4° que hace que el alcance sea máximo
v0=40; %velocidad inicial
b=0.000625*9.8; %coeficiente
f=@(x) 4*9.8^2*(cos(x)^2-sin(x)^2)+9.8*b*v0^2*(cos(x)^2*sin(x)-6*sin(x)^3+
4*log(tan(x/2+pi/4))*cos(x)^4)+b^2*v0^4*(-sin(x)^2*cos(x)^2-2*sin(x)^4+
log(tan(x/2+pi/4))*sin(x)*cos(x)^4);
angMax=fzero(f,[0,pi/2])*180/pi;
disp(angMax)
angIni=5:0.5:80;
xMax=zeros(1,length(angIni));
g=@(x) 2*sqrt(2)*v0^2*sin(x)*cos(x)/sqrt(2*9.8^2+3*9.8*b*v0^2*sin(x)+
b^2*v0^4*sin(x)^2+2*9.8*b*v0^2*log(tan(x/2+pi/4))*cos(x)^2+
b^2*v0^4*log(tan(x/2+pi/4))*cos(x)^2*sin(x));
i=1;
for th_0=angIni*pi/180
xMax(i)=g(th_0);
i=i+1;
end
plot(angIni, xMax)
maximo=g(angMax*pi/180);
line([angMax, angMax],[0,maximo], 'lineStyle','--')
line([0, angMax],[maximo, maximo], 'lineStyle','--')
grid on
xlabel('\theta_0')
ylabel('R')
title('Alcance máximo')
40.3750
Referencias
R. D. H. Warburton, J. Wang, J. Burgdofer. Analytic Approximations of Projectile Motion with Quadratic Air Resistence. J. Service Science & Management, 2010,3:98-105
Erlichson H. Maximum projectile range with drag and lift, with particular application to golf. Am. J. Phys. 51 (4) April 1983, pp. 357-362.
Warburton R. D. H. , Wang J., Analysis of asymptotic projectile motion with air resistance using Lambert W function. Am. J. Phys. 72 (11) November 2004, pp. 1404-1407
Brancazio P. J. Looking into Chapman's homer: The physics of judging a fly ball. Am. J. Phys. 53 (9) September 1985, pp. 849-855.
Peter S Chudinov. Approximate Analytical Description of the Projectile Motion with a Quadratic Drag Force. Athens Journal of Sciences- Volume 1, Issue 2 – Pages 97-106
Pirooz Mohazzabi. When Does Air Resistance Become Significant in Projectile Motion?. The Physics Teacher. Vol. 56, March 2018. pp. 168-169
John L. Bradshaw. Projectile motion with quadratic drag. Am. J. Phys.91 (4), April 2023, pp. 258-263