

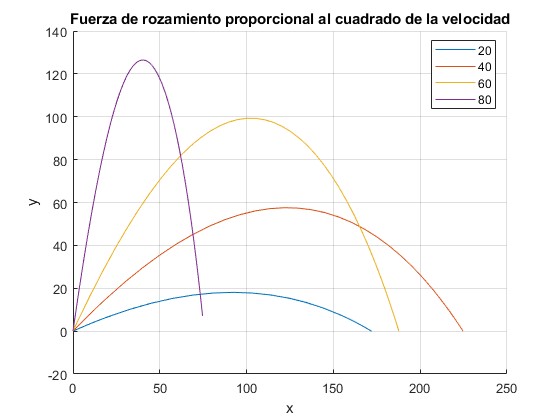
Fuerza de rozamiento proporcional al cuadrado de la velocidad (I)
Un proyectil de masa m que se dispara desde el origen con velocidad v0, haciendo un ángulo θ0 con la horizontal
Si despreciamos el empuje, las fuerzas que actúan sobre el cuerpo de masa m son:
- El peso mg
- La fuerza de rozamiento Fr, que es de sentido contrario al vector velocidad (tangente a la trayectoria).
Las ecuaciones del movimiento del cuerpo serán por tanto.
Las condiciones iniciales son t=0, velocidad inicial: v0x=v0·cosθ, v0y=v0·sinθ, posición inicial: x=0, y=0.
Se resuelve este sistema de ecuaciones diferenciales mediante el procedimiento
function cuadrado_1
b=0.0025; %parámetro
v0=60; %velocidad incial
% x(1) es x, x(2) es dx/dt, x(3) es y, x(4) es dy/dt
fg=@(t,x)[x(2);-b*sqrt(x(2)^2+x(4)^2)*x(2); x(4);
-9.8-b*sqrt(x(2)^2+x(4)^2)*x(4)];
opts=odeset('events',@stop_proyectil);
hold on
for th_0=(20:20:80); %ángulo de tiro
[~,x]=ode45(fg,[0,10],[0,v0*cosd(th_0),0,v0*sind(th_0)], opts);
plot(x(:,1),x(:,3),'displayName',num2str(th_0)) %trayectoria
end
hold off
grid on
xlabel('x')
legend('-DynamicLegend','location','best')
ylabel('y')
title('Fuerza de rozamiento proporcional al cuadrado de la velocidad')
function [detect,stopin,direction]=stop_proyectil(t,x)
detect=x(3);
stopin=1;
direction=-1;
end
end
Hemos definido una función
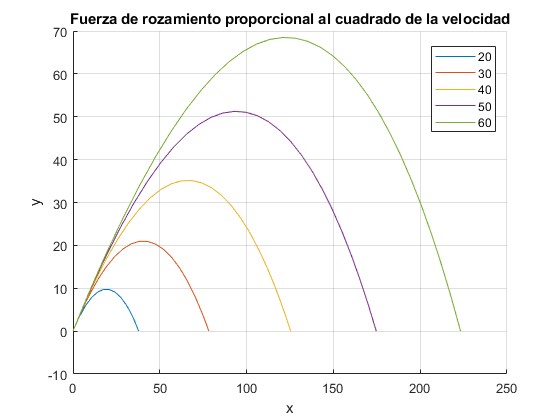
Mostramos las trayectorias de los proyectiles disparados con velocidad v0=20,30, 40, 50, 60 m/s y con ángulo de tiro, θ=45°.
function cuadrado_2
b=0.0025; %parámetro
th_0=pi/4; %ángulo de tiro (45)
% x(1) es x, x(2) es dx/dt, x(3) es y, x(4) es dy/dt
fg=@(t,x)[x(2);-b*sqrt(x(2)^2+x(4)^2)*x(2); x(4);
-9.8-b*sqrt(x(2)^2+x(4)^2)*x(4)];
opts=odeset('events',@stop_proyectil_v2);
hold on
for v0=(20:10:60); %velocidad de disparo
[~,x]=ode45(fg,[0,10],[0,v0*cos(th_0),0,v0*sin(th_0)], opts);
plot(x(:,1),x(:,3),'displayName',num2str(v0)) %trayectoria
end
hold off
grid on
xlabel('x')
legend('-DynamicLegend','location','best')
ylabel('y')
title('Fuerza de rozamiento proporcional al cuadrado de la velocidad')
function [detect,stopin,direction]=stop_proyectil_v2(t,x)
detect=x(3);
stopin=1;
direction=-1;
end
end
Actividades
Introducimos:
- El valor del parámetro b en unidades m-1, en el control titulado b
- La velocidad inicial v0 en el control titulado Velocidad inicial.
El programa interactivo traza y calcula el alcance de los proyectiles disparados con ángulos de 10, 15, 20, 25, 30, 35, 40 y 45º (en color rojo).
Compara estas trayectorias con la que seguiría el mismo proyectil disparado con un ángulo de 45º en el vacío (en color azul).
En la parte superior derecha, se muestra el alcance (aproximado) de cada uno de los proyectiles. Observamos que el máximo alcance del proyectil no se obtiene para el ángulo de disparo de 45º sino para un ángulo inferior. Y como cabía esperar, el alcance del proyectil disparado con 45º es inferior en un medio como el aire que en el vacío.
Experiencia
Se dispone de un dispositivo lanzador de proyectiles, por ejemplo el ME-6800 de PASCO que lanza bolas de acero de D=2.5 cm de diámetro con velocidades iniciales variables. Se pone el dispositivo sobre una mesa de h=1 m de altura, se ajusta el ángulo de tiro θ, se dispara y se mide el tiempo de vuelo T y el alcance horizontal X del proyectil.
Se compara las medidas con la del mismo proyectil describiendo una trayectoria parabólica con la misma velocidad inicial y en la misma dirección.
Datos:
- Densidad del aire, ρf=1.293 kg/m3 (0° C y 760 mm Hg de presión)
- Densidad del acero, ρ, de 7700 a 7900 kg/m3 (a 20° C)
- Viscosidad del aire, η=18.37·10-6 kg/(m·s) (a 25° C)
Fuente: N.I. Koshkin , M. G. Shirkévich. Manual de física elemental. Editorial Mir (1975), págs, 36, 39 y 57
El número de Reynolds para un proyectil de forma esférica que se mueve a la velocidad v= 7 m/s es
Para números de Reynolds del orden de 104 hasta 2·105 el coeficiente de arrastre se mantiene casi constante y próximo a CD=0.4
La expresión de la fuerza de rozamiento proporcional al cuadrado de la velocidad es
En el aparatado anterior, el módulo de fuerza de rozamiento se escribe Fr=mb·v2. Donde m es la masa (producto de la densidad del acero por el volumen de la esfera). El parámetro b vale
El valor que se proporciona en el artículo de Pirooz Mohazzabi citado en las referencias es b=0.002141 m-1
Dibujamos las trayectorias de los proyectiles disparados con velocidad v0=10 m/s y con ángulos de tiro 0, 10, 20, ...90°.
function rozamiento
b=0.002141; %parámetro
v0=10; %velocidad incial
h=1; %altura
fg=@(t,x)[x(2);-b*sqrt(x(2)^2+x(4)^2)*x(2); x(4);
-9.8-b*sqrt(x(2)^2+x(4)^2)*x(4)];
opts=odeset('events',@stop_proyectil_v2);
hold on
for th_0=(0:10:90)*pi/180 %ángulo de tiro
[t,x]=ode45(fg,0:0.01:10,[0,v0*cos(th_0),0,v0*sin(th_0)], opts);
plot(x(:,1),x(:,3)) %trayectoria
disp([th_0*180/pi, t(end), x(end,1)])
end
grid on
ylim([-1,5])
xlabel('x(m)')
ylabel('y(m)');
title('Tiro con rozamiento')
hold off
function [detect,stopin,direction]=stop_proyectil_v2(~,x)
detect=x(3)+h;
stopin=1;
direction=-1;
end
end
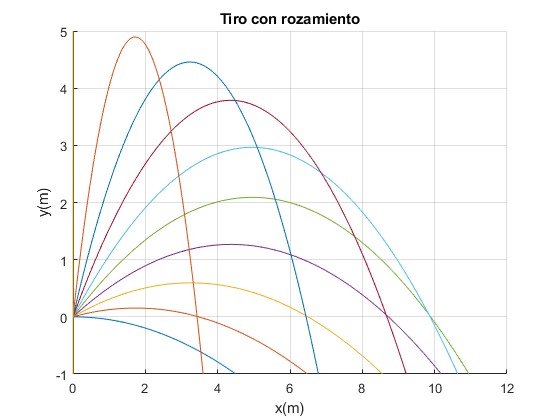
En esta tabla, la primera columna es el ángulo de tiro, la segunda, el tiempo de vuelo y la tercera, el alcance horizontal
0 0.4525 4.5029 10.0000 0.6629 6.4824 20.0000 0.9192 8.5569 30.0000 1.1893 10.1815 40.0000 1.4479 10.9482 50.0000 1.6782 10.6395 60.0000 1.8682 9.2139 70.0000 2.0097 6.7847 80.0000 2.0969 3.5975 90.0000 2.1263 0.0000
Actividades
Se introduce
- La velocidad inicial, v0 entre 5 y 10 m/s, en el control titulado Velocidad inicial
- El ángulo de tiro, θ entre 0 y 90°, en el control titulado Angulo de tiro
- Se ha fijado el valor del parámetro b=0.002141 m-1
Se resuelve por el procedimiento de Runge-Kutta, el sistema de dos ecuaciones diferenciales hasta que el proyectil choca con el suelo y=-h. Se traza la trayectoria del poyectil en color rojo.
Se traza la trayectoria parabólica (sin rozamiento) en color azul
Cuando el proyectil llega al suelo y=-h, el tiempo de vuelo T y el alcance X son
Soluciones analíticas aproximadas
Las ecuaciones del movimiento del cuerpo son:
Vamos a considerar tres casos:
Para ángulos de tiro θ pequeños, vx>>vy, v=vx. Se cumple en todos los puntos de la trayectoria
Para ángulos de tiro θ grandes, próximos a 90°, |vy|>>vx, v=|vy|. vy es positivo en la rama ascendente, es negativo en la rama descendente y es nulo en el punto más alto de la trayectoria. Esta condición se cumple en la mayor parte de la trayectoria
Para ángulos de tiro θ próximos a 45° se cumple que|vy|≈vx, . Esta condición no se cumple en toda la trayectoria, así, vy=0 en el punto más alto
En este apartado, vamos a obtener soluciones analíticas para estos tres casos
Angulos de tiro θ pequeños
Para ángulos de tiro θ pequeños, vx>>vy, v=vx. Se cumple en todos los puntos de la trayectoria. Las ecuaciones del movimiento se escriben
Integramos la primera ecuación diferencial, con la condición inicial de que en el instante t=0, vx=v0x=v0·cosθ
Integramos la segunda ecuación diferencial, con la condición inicial de que en el instante t=0, vy=v0y=v0·sinθ
Llamando z=vy y a=b·v0x. Escribimos la ecuación diferencial de la forma equivalente
Probamos la solución z=u·v
Solución u. Igualamos el paréntesis a cero y obtenemos la expresión de u
Solución v
Solución completa, z=u·v
donde la constante C de integración de determina a partir de las condiciones iniciales, para t=0, vy=v
>> syms z a t g v0y;
>> dsolve('Dz+a*z/(1+a*t)=-g','z(0)=v0y')
ans =v0y/(a*t + 1) - (g*t*(a*t + 2))/(2*(a*t + 1))
>> simplify(ans)
ans =-(a*g*t^2 + 2*g*t - 2*v0y)/(2*(a*t + 1))
Conocidas las componentes vx=dx/dt y vy=dy/dt de la velocidad en función del tiempo, integramos para obtener la posición x e y de la partícula en función del tiempo t, sabiendo que parte del origen en el instante t=0
- Abscisa x
- Ordenada y
Ecuación de la trayectoria. Despejamos el tiempo en la primera ecuación y sustituimos en la segunda
El rango R, se obtiene cuando y=0.
Expresamos el rango en términos de la función W de Lambert, solución de la ecuación trascendente ab·x+c=d·x+f con a→e, b→2b, c→0, , f→1
Altura máxima, se obtiene dy/dx=0. La abscisa del máximo de y es
Poniendo x=R, obtenemos el tiempo de vuelo
Lanzamos un proyectil con velocidad inicial v0=9.8 m/s, con un ángulo de tiro θ=20°. Supondremos que el parámetro b=0.1 m-1
b=0.1; %parámetro
v0=9.8; %velocidad incial
angulo=20*pi/180; %ángulo de tiro
%solución analítica aproximada
beta=2*b*v0*cos(angulo)*v0*sin(angulo)/9.8;
z=-exp(-1/(1+beta))/(1+beta);
R=-(lambertw(-1,z)+1/(1+beta))/(2*b); %alcance
f=@(x) (v0*sin(angulo)+9.8/(2*b*v0*cos(angulo)))*x/(v0*cos(angulo))-
9.8*(exp(2*b*x)-1)/(2*b*v0*cos(angulo))^2;
%procedimiento numérico
x0=[0,v0*cos(angulo),0,v0*sin(angulo)];
tspan=[0,2*v0*sin(angulo)/9.8]; %tiempo de vuelo sin rozamiento
%x(1) es x, x(2) es v_x, x(3) es y, x(4) es v_y
fg=@(t,x)[x(2);-b*sqrt(x(2)^2+x(4)^2)*x(2); x(4);-9.8-b*sqrt(x(2)^2+x(4)^2)*x(4)];
opts=odeset('events',@stop_proyectil_v2);
[t,x]=ode45(fg,tspan,x0,opts);
hold on
plot(x(:,1),x(:,3)) %trayectoria
fplot(f,[0,R])
grid on
legend('numérico','ángulo pequeño')
xlabel('x(m)')
ylabel('y(m)');
title('Tiro con rozamiento')
hold off
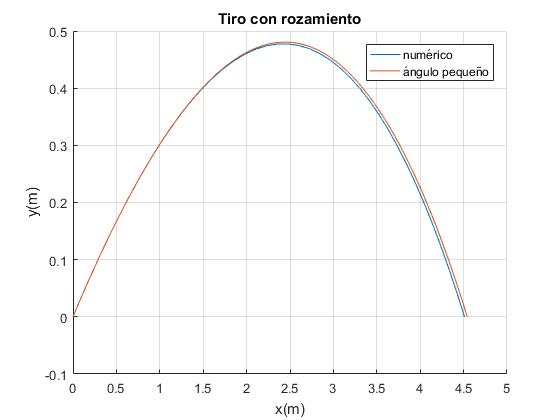
Comparamos la altura máxima h con el valor obtenido integrando las ecuaciones del movimiento por procedimientos numéricos,
>> h=v0*sin(angulo)*((beta+1)*log(beta+1)/beta-1)/(2*b*v0*cos(angulo)) h = 0.4806 >> max(x(:,3)) ans = 0.4773 >> T=(exp(-(lambertw(-1,z)+1/(1+beta))/2)-1)/(b*v0*cos(angulo)) T= 0.6246 >> t(end) ans = 0.6228 >> R R = 4.5436 >> x(end,1) ans = 4.5106
La solución numérica se aproxima a la solución analítica para ángulos pequeños de tiro
Angulos de tiro grandes, próximos a 90°
Para ángulos de tiro θ grandes, próximos a 90°, |vy|>>vx, v=|vy|. vy es positivo en la rama ascendente, es negativo en la rama descendente y es nulo en el punto más alto de la trayectoria. Las ecuaciones del movimiento se escriben
Debido a que vy cambia de signo de la trayectoria ascendente a la descendente, hay que resolver este sistema de ecuaciones diferenciales en dos etapas
Trayectoria ascendente vy>0
Integramos la segunda ecuación diferencial
Conocido vy, integramos la primera ecuación diferencial para obtener la expresión de vx
Conocidas las componentes vx y vy de la velocidad en función del tiempo, integramos para obtener la posición x, y, sabiendo que en el instante t=0, el proyectil parte del origen
Abscisa x
Ordenada y
Se ha utilizado el resultado de la integral de la inversa del coseno
Vértice de la trayectoria
Denominamos τ al tiempo que tarda la partícula en alcanzar la altura máxima, el vértice de la trayectoria
Las coordenadas del vértice de la trayectoria son
Las componentes de velocidad v1x y v1y son
El vértice de la trayectoria es el punto de partida para la trayectoria descendente
Trayectoria descendente vy<0
Las ecuaciones del movimiento se escriben
Integramos la segunda ecuación diferencial
Conocida vy, integramos la primera ecuación diferencial para obtener la expresión de vx
Conocidas las componentes vx y vy de la velocidad en función del tiempo, integramos para obtener las expresiones de x e y
Abscisa x
Ordenada y
Tiempo de vuelo, T que tarda en llegar al suelo, y=0
Introduciendo este tiempo T en la expresión de x obtenemos el rango R
Lanzamos un proyectil con velocidad inicial v0=9.8 m/s, con un ángulo de tiro θ=70°. Supondremos que el parámetro b=0.1 m-1
b=0.1; %parámetro
v0=9.8; %velocidad incial
angulo=70*pi/180; %ángulo de tiro
%solución analítica aproximada
phi=atan(sqrt(b/9.8)*v0*sin(angulo));
%coordendas del vértice de la trauyectoria
tau=phi/sqrt(9.8*b); %tiempo
y1=-log(cos(phi))/b;
x1=v0*cos(angulo)*cos(phi)*log(tan(pi/4+phi/2))/sqrt(9.8*b);
f_X=@(t) v0*cos(angulo)*cos(phi)*log(tan(phi/2+pi/4)./
tan(phi/2+pi/4-sqrt(9.8*b)*t/2))/sqrt(9.8*b);
f_Y=@(t) log(cos(phi-sqrt(9.8*b)*t)/cos(phi))/b;
g_X=@(t) 2*v0*cos(angulo)*cos(phi)*
(atan(exp(sqrt(9.8*b)*(t-tau)))-pi/4)/sqrt(9.8*b)+x1;
g_Y=@(t) -log(cosh(sqrt(9.8*b)*(t-tau))*cos(phi))/b;
tFin=tau+log(1/cos(phi)+tan(phi))/sqrt(9.8*b); %tiempo total de vuelo
%procedimiento numérico
x0=[0,v0*cos(angulo),0,v0*sin(angulo)];
tspan=[0,2*v0*sin(angulo)/9.8]; %tiempo de vuelo sin rozamiento
fg=@(t,x)[x(2);-b*sqrt(x(2)^2+x(4)^2)*x(2); x(4);-9.8-b*sqrt(x(2)^2+x(4)^2)*x(4)];
opts=odeset('events',@stop_proyectil_v2);
[t,x]=ode45(fg,tspan,x0,opts);
hold on
plot(x(:,1),x(:,3)) %trayectoria
fplot(f_X,f_Y,[0,tau])
fplot(g_X,g_Y,[tau,tFin])
grid on
legend('numérico','ángulo grande')
xlabel('x(m)')
ylabel('y(m)');
title('Tiro con rozamiento')
hold off
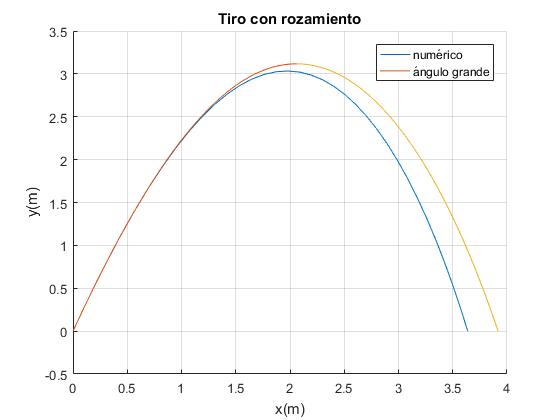
Comparamos la altura máxima y1 con el valor obtenido integrando las ecuaciones del movimiento por procedimientos numéricos,
>> y1 y1 = 3.1173 >> max(x(:,3)) ans = 3.0336 >> tFin tFin = 1.5965 >> t(end) ans = 1.5732 >> R=2*v0*cos(angulo)*cos(phi)*(atan(exp(sqrt(9.8*b)*(T-tau)))-pi/4)/sqrt(9.8*b)+x1 R = 3.9180 >> x(end,1) ans = 3.6386
Vemos que la solución numérica y la aproximación analítica para ángulos próximos a 90° se alejan bastante en comparación con el caso anterior, para ángulos de tiro pequeños
Angulos de tiro próximos a 45°
El módulo de la velocidad en la dirección horizontal es , y en la dirección vertical
Las ecuaciones del movimiento se escriben
Debido a que vy cambia de signo de la trayectoria ascendente a la descendente, hay que resolver este sistema de ecuaciones diferenciales en dos etapas
Trayectoria ascendente vy>0
Trayectoria desscendente vy<0
La solución de la primera ecuación diferencial es la misma que hemos obtenido para ángulos de tiro pequeños, cambiando . La solución de la segunda ecuación diferencial es la misma que hemos obtenido para ángulos de tiro grandes, haciendo el mismo cambio
Lanzamos un proyectil con velocidad inicial v0=9.8 m/s, con un ángulo de tiro θ=45°. Supondremos que el parámetro b=0.1 m-1
b=0.1*sqrt(2); % (b=0.1), parámetro para la solución analítica
v0=9.8; %velocidad incial
%solución analítica aproximada
angulo=45*pi/180; %ángulo de tiro
phi=atan(sqrt(b/9.8)*v0*sin(angulo));
%coordendas del vértice de la trayectoria
tau=phi/sqrt(9.8*b); %tiempo
y1=-log(cos(phi))/b;
x1=log(1+b*v0*cos(angulo)*tau)/b;
f_X=@(t) log(1+b*v0*cos(angulo)*t)/b;
f_Y=@(t) log(cos(phi-sqrt(9.8*b)*t)/cos(phi))/b;
g_X=@(t) log(1+b*v0*cos(angulo)*t)/b;
g_Y=@(t) -log(cosh(sqrt(9.8*b)*(t-tau))*cos(phi))/b;
tFin=tau+log(1/cos(phi)+tan(phi))/sqrt(9.8*b); %tiempo total de vuelo
%procedimiento numérico
b=0.1; %parámetro para la solución numérica
x0=[0,v0*cos(angulo),0,v0*sin(angulo)];
tspan=[0,2*v0*sin(angulo)/9.8]; %tiempo de vuelo sin rozamiento
fg=@(t,x)[x(2);-b*sqrt(x(2)^2+x(4)^2)*x(2); x(4);-9.8-b*sqrt(x(2)^2+x(4)^2)*x(4)];
opts=odeset('events',@stop_proyectil_v2);
[t,x]=ode45(fg,tspan,x0,opts);
hold on
plot(x(:,1),x(:,3)) %trayectoria
fplot(f_X,f_Y,[0,tau])
fplot(g_X,g_Y,[tau,tFin])
grid on
legend('numérico','ángulo medio')
xlabel('x(m)')
ylabel('y(m)');
title('Tiro con rozamiento')
hold off
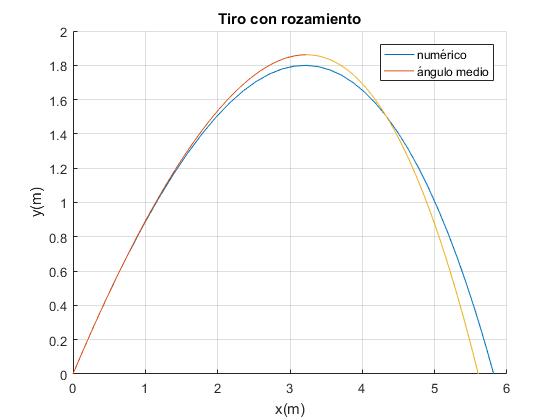
Comparamos la altura máxima y1 con el valor obtenido integrando las ecuaciones del movimiento por procedimientos numéricos,
>> y1 y1 = 1.8614 >> max(x(:,3)) ans = 1.7997 >> tFin tFin = 1.2334 >> t(end) ans = 1.2078 >> R=log(1+b*v0*cos(angulo)*tFin)/b R = 5.6032 >> x(end,1) ans = 5.8162
Referencias
Al final de la siguiente página, titulada Fuerza de rozamiento proporcional al cuadrado de la velocidad (II)