

Vibraciones de una cuerda en rotación
Supongamos una cuerda de densidad lineal μ, que está libre en un extremo y en el otro está atado a un eje vertical que gira con velocidad angular constante ω. Despreciando la gravedad vamos a determinar la ecuación de la propagación de las ondas transversales en la cuerda.
Ecuación diferencial del movimiento ondulatorio
Consideremos un elemento diferencial de cuerda situado entre x y x+dx, de masa μ·dx.
La parte izquierda de la cuerda, ejerce una fuerza T(x) sobre dicho elemento, la parte derecha de la cuerda ejerce una fuerza T(x+dx). Su aceleración es ω2x dirigida radialmente hacia el centro de la circunferenca que describe. La segunda ley de Newton se escribe
T(x)-T(x+dx)=(μ·dx)ω2x
-dT=μω2x·dx
Sabiendo que T(l)=0, integramos
Consideremos una cuerda cuya tensión es T(x). En el equilibrio, la cuerda está en línea recta. Vamos a ver lo que ocurre cuando se desplaza verticamente, un elemento de longitud dx, situado en la posición x de la cuerda, una cantidad Ψ respecto de la posición de equilibrio.
Dibujamos las fuerzas que actúan sobre el elemento diferencial y calculamos la aceleración del mismo, aplicando la segunda ley de Newton.
La componente vertical de la fuerza que ejerce la parte izquierda de la cuerda sobre el elemento diferencial dx es
La componente vertical de la fuerza que ejerce la parte derecha de la cuerda sobre el elemento diferencial dx es
Siempre que la amplitud del movimiento ondulatorio transversal sea pequeña, se puede hacer la aproximación sinα≈tanα
La fuerza vertical neta es el producto de la masa porla aceleración vertical
Modos de vibración
Resolveremos esta ecuación diferencial en derivadas parciales con la siguiente condición de contorno: Ψ(0,t)=0. Un extremo de la cuerda está atado al eje vertical de rotación
Las condiciones iniciales
Para resolver la ecuación diferencial dividimos la solución en producto de dos funciones una dependiente de x y la otra de t.
Hemos sustituimos una ecuación diferencial en derivadas parciales por dos ecuaciones diferenciales. La primera tiene una solución sencilla
Para la segunda, sustituimos x=lξ
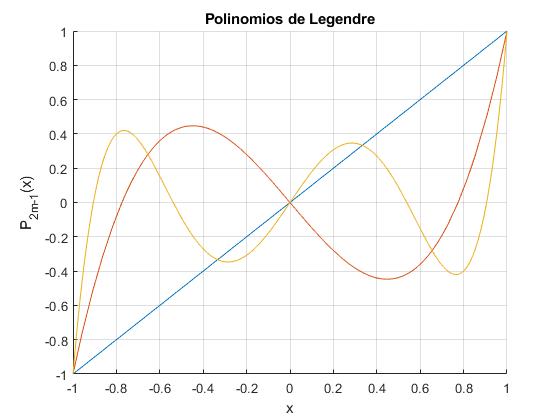
Esta es la ecuación diferencial de Legendre, con λ=n(n+1), donde n es un entero positivo. La solución de la ecuación diferencial son los polinomios de Legendre Pn(ξ) definidos en el intervalo [-1,1].
Los polinomios que cumplen Pn(0)=0, son aquellos en los que n es un número impar 1,3,5,..2m-1, donde m es un entero positivo. Estos polinomos son antisimétricos, Pn(ξ)=-Pn(-ξ), con n=2m-1
hold on
for m=1:3
fplot(@(x) legendreP(2*m-1,x),[-1,1])
end
hold off
grid on
xlabel('x')
ylabel('P_{2m-1}(x)')
title('Polinomios de Legendre')
La solución de las ecuaciones diferenciales para el modo m es
Las frecuencias de los modos normales de vibración de la cuerda son
Superposición
La solución general que satisface la condición de contorno Ψ(0,t)=0, es la superposición
Donde los coeficientes Am y Bm se determinan a partir de las condiciones iniciales.
Teniendo en cuenta la propiedad de los polinomios de Legendre
Calculamos los coeficientes Am
Calculamos los coeficientes Bm
Ejemplo
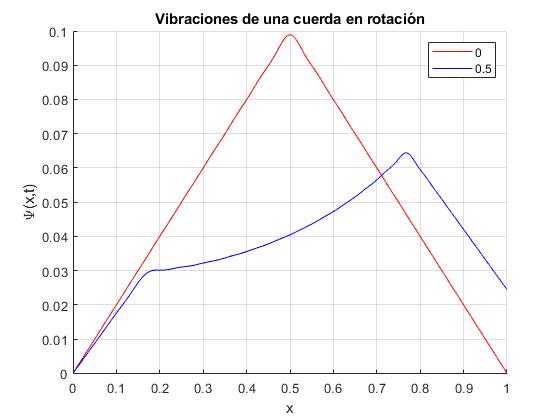
Se deforma inicialmente la cuerda tal como se muestra en la figura. Las condiciones iniciales son
Los coeficientes Bm=0
Calculamos los coeficientes Am, respresentando el estado inicial de la cuerda t=0, y en el instante t=0.5. Los datos son:
- Longitud de la cuerda, l=1
- Velocidad angular de rotación, ω=1
- Deformación en el centro de la cuerda, h=0.1
w=1; %velocidad angular de rotación
L=1; %longitud de la cuerda
h=0.1; %deformación
N=50; %número de términos
%coeficientes A_m
A=zeros(1,N);
for m=1:N %inicial
A(m)=(4*m-1)*2*h*(integral(@(x) legendreP(2*m-1,x/L).*x/L, 0,L/2)+
integral(@(x) legendreP(2*m-1,x/L).*(1-x/L), L/2,L))/L;
end
hold on
x=linspace(0,L,200);
y=zeros(1,length(x));
for m=1:N %inicial
y=y+A(m)*legendreP(2*m-1,x/L);
end
plot(x,y,'r');
t=0.5; %instante
y=zeros(1,length(x));
for m=1:N
y=y+A(m)*legendreP(2*m-1,x/L)*cos(w*sqrt(m*(2*m-1))*t);
end
plot(x,y,'b');
hold off
grid on
legend('0','0.5')
xlabel('x')
ylabel('\Psi(x,t)')
title('Vibraciones de una cuerda en rotación')
Referencias
N. S. Kosholyakov, M. M. Smirnov, E. B. Gliner. Differential equations of Mathematical Physics. North-Holland Publishing Company (1964) pp. 210-213
Lim Yung-kuo. Problems and Solutions on Mechanics. World Scientific (1994). Problem 1232, pp. 379-382