

Oscilaciones de una partícula unida a un muelle de masa no nula
Ecuación diferencial del movimiento ondulatorio
Un muelle elástico se comporta de forma análoga a una barra elástica, deduciremos de forma similar la ecuación diferencial del movimiento ondulatorio y determinaremos la velocidad de propagación de las ondas longitudinales
Sea un muelle elástico de longitud L sin deformar. Cuando se le aplica una fuerza F a su extremo libre se alarga x, su longitud es l=L+x. La relación lineal fuerza-deformación se expresa
Consideremos un elemento diferencial dx del muelle en la posición x. A causa de la perturbación, el elemento se desplaza u y se deforma du, de modo que la nueva anchura del elemento es dx+du. Calculamos la fuerza necesaria para producir esta deformación
A efectos de notación (derivada parcial) recuérdese que el desplazamiento u, es una función de dos variables x (posición) y t (tiempo).
Desplazamiento del elemento diferencial
La parte izquierda del muelle ejerce una fuerza F sobre el elemento diferencial de anchura dx, la parte derecha, ejerce una fuerza F' sobre dicho elemento. La fuerza neta es
La segunda ley de Newton afirma que la fuerza sobre dicho elemento es igual al producto de su masa (m·dx/L) por la aceleración (derivada segunda del desplazamiento)
Igualando ambas expresiones obtenemos la ecuación diferencial de un movimiento ondulatorio
La velocidad de propagación es v=ωL depende de
- k es la constante elástica del muelle
- L es la longitud del muelle sin deformar
- m es la masa del muelle
Condiciones iniciales y de contorno
Sea un cuerpo de masa M unido a un muelle elástico de constante k, masa m y longitud L sin deformar
Las condiciones iniciales son
Las condiciones de contorno son
En el instante t=0, el muelle está en reposo
Se ha deformado l0, por lo que un punto x del muelle se ha desplazado u(x,0)=xl0/L
El extremo izquierdo del muelle está fijo, u(0,t)=0
La fuerza F que ejerce el muelle sobre el cuerpo de masa M, produce una aceleración
Separación de variables
Para resolver la ecuación diferencial dividimos la solución en producto de dos funciones una dependiente de x y la otra de t.
Como el miembro izquierdo depende solamente de t y el derecho solamente de x, entonces, igualamos ambos a una constante que denominaremos -(ωξ)2. Obtenemos el sistema de dos ecuaciones diferenciales
Ambas ecuaciones tienen soluciones conocidas
Donde A, B, C y D se determinan a partir de las dos condiciones iniciales y las otras dos de contorno.
Modos de vibración
Si el muelle está fijo por el extremo izquierdo x=0, entonces X(0)=0 y C=0.
El muelle está inicialmente en reposo
El cuerpo de masa M situado en x=L experimenta una aceleración debido a la fuerza que ejerce el muelle
por lo que B=0
Se representa la función y=cot(x), y la recta y=x/(m/M), con x=ξ. La intersección son las raíces buscadas. Una ecuación similar calcula los máximos secundarios de difracción de una rendija
m_M=1; %cociente m/M
hold on
fplot(@(x) cot(x),[0,4*pi])
fplot(@(x) x/m_M,[0,4*pi])
hold off
set(gca,'XTick',0:pi/2:4*pi)
set(gca,'XTickLabel',{'0','\pi/2','\pi','3\pi/2','2\pi',
'5\pi/2','3\pi','7\pi/2','4\pi'})
grid on
ylim([-20,20])
xlabel('\lambda/\omega')
ylabel('y')
title('Raíces')
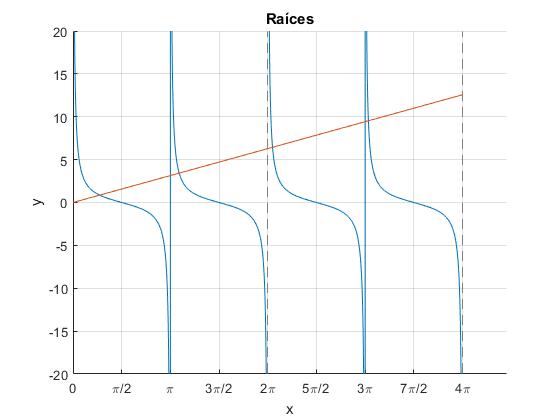
Las raíces están en los intervalos (0,π/2), (π,3π/2), (2π,5π/2)....La función cot(nπ) se hace infinita, para n=0,1,2,3...Cuando se aplican el procedimiento numérico fzero de MATLAB, aparece un error que podemos de evitar calculando las raíces de la ecuación transcendente equivalente
Los primeros valores de las raíces de la ecuación transcendente para m/M=1, son
m_M=1; %cociente m/M
f=@(x) m_M*cos(x)-x*sin(x);
for n=0:5
xi_n=fzero(f,[n*pi,n*pi+pi/2]);
disp(xi_n)
end
0.8603
3.4256
6.4373
9.5293
12.6453
15.7713
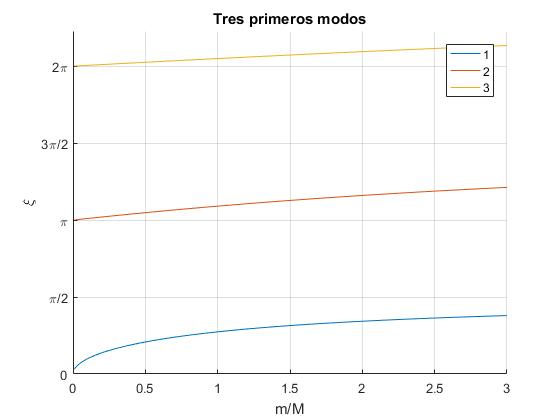
Cuando m/M→0, cot(ξ)→∞, las raíces ξn se aproximan a 0, π, 2π...
Cuando n es grande las raíces ξn se aproximan a (n-1)π
En al figura, observamos cómo cambia ξ1, ξ2 y ξ3 con el cociente m/M
m_M=0.01:0.01:3; %cociente m/M
xi=zeros(1,length(m_M));
hold on
for n=0:2
i=1;
for c=m_M
f=@(x) c*cos(x)-x*sin(x);
xi(i)=fzero(f,[n*pi,n*pi+pi/2]);
i=i+1;
end
plot(m_M,xi, 'displayName',num2str(n+1))
end
hold off
set(gca,'YTick',0:pi/2:4*pi)
set(gca,'YTickLabel',{'0','\pi/2','\pi','3\pi/2','2\pi','5\pi/2',
'3\pi','7\pi/2','4\pi'})
legend('-DynamicLegend','location','northeast')
grid on
ylabel('\lambda/\omega')
xlabel('m/M')
title('Tres primeros modos')
La solución de la ecuación diferencial correspondiente al modo n, con B=0 y C=0 es
Superposición
La solución general, es la superposición
Para calcular los coeficientes An, utilizamos los siguientes relaciones de las funcione seno y coseno.
para calcular las integrales siguientes
Teniendo en cuenta que que ξn son las raíces de la ecuación transcendente,
Del mismo modo
Este es un resultado importante, que nos dice que las funciones cos(ξnx/L) son ortogonales pero no lo son las funciones seno
Cuando los índices m y n son iguales, utilizamos las relaciones trigonométricas
para calcular las integrales
La deformación inicial del muelle es l0 o bien, u(x,0)=xl0/L, nos permite calcular los coeficientes An
Sin embargo, las funciones seno no son ortogonales, por lo que tendremos que utilizar las funciones coseno, por lo que procedemos a derivar ambos miembros
Multiplicamos ambos miembros por cos(ξmx/L) en integramos entre 0 y L
Cuando x=L, se cumplirá que
Resultado importante, que utilizaremos en el cálculo de la energía del sistema. Comprobamos que la suma de la serie tiende hacia 1/2. Tomamos el cociente entre masas m/M=0.3 y se han sumado los 10 primeros términos del desarrollo en serie
m_M=0.3; %cociente m/M
f=@(x) m_M*cos(x)-x*sin(x);
sum=0;
for n=0:10
xi=fzero(f,[n*pi,n*pi+pi/2]);
sum=sum+sin(xi)^2/(xi^2*(1+sin(xi)^2/m_M));
end
disp(sum)
0.5000
La solución completa es
u(x,t) es el desplazamiento de un elemento infinitesimal dx cuya abscisa es x en el muelle no deformado
Energías
Tenemos que calcular tres energías: la energía cinética EkM del cuerpo de masa M, la energía cinética de los distintos elementos del muelle Ekm y su energía potencial Ep, debido a que el muelle experiementa deformaciones. La suma de las tres energías deberá dar constante e igual a la energía inicial del muelle deformado, l0
Energía cinética del muelle
El elemento diferencial comprendido entre x yx+dx tiene una masa m·dx/L y se desplaza con velocidad , su energía cinética es , y la energía cinética total se obtiene integrando con respecto de x en el intervalo 0≤x≤L
Energía cinética del cuerpo
La energía cinética del cuerpo de masa M situado en x=L, unido al muelle elástico es
Energía potencial del muelle deformado
Cada elemento diferencial comprendido entre x y x+dx, acumula una energía potencial debido a la deformación, que es igual al producto de la fuerza media por el desplazamiento. La fuerza en la posición x, es
La energía potencial de dicho elemento diferencial
La energía potencial total se obtiene, integrando con respecto de x en el intervalo 0≤x≤L
Energía del modo n de vibración
Dado que u(x,t) es la superposición de los infinitos modos de vibración, calculamos la energía de cada uno de los modos
Calculamos la energía total para el modo n y sumamos para todos los modos. La energía total deberá ser constante e igual a la energía de deformación inicial del muelle elástico
Energía cinética del muelle elástico
Energía cinética del cuerpo de masa M
Energía potencial del muelle elástico
Sumamos los tres términos
Teniendo en cuenta la expresión de An
Energía total de todos los modos de vibración
Hemos utilizado la propiedad importante deducida al final del apartado anterior. La energía total es constante e igual a la deformación inicial del muelle
En la figura se muestra la energía de los tres primeros modos de vibración dividida por la energía inicial en función del cociente m/M
m_M=0.01:0.01:3; %cociente m/M
E_n=zeros(1,length(m_M));
hold on
for n=0:2
i=1;
for c=m_M
f=@(x) c*cos(x)-x*sin(x);
xi=fzero(f,[n*pi,n*pi+pi/2]);
E_n(i)=2*sin(xi)^2/(xi^2*(1+sin(xi)^2/c)); %E_n/(kl0^2/2)
i=i+1;
end
plot(m_M,E_n, 'displayName',num2str(n+1))
end
hold off
legend('-DynamicLegend','location','northwest')
grid on
ylabel('E_n')
xlabel('m/M')
title('Energía, tres primeros modos')
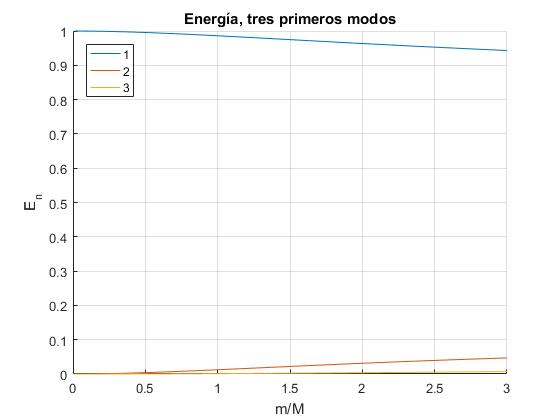
Vemos que el primer modo lleva casi toda la energía cuando el cociente m/M es pequeño
Periodo
En el caso de un muelle ideal de constante k ideal (de masa despreciable) unido a un cuerpo de masa M, el periodo P es
Midiendo los periodos P de muelles de constante k y masa m no despreciable, unidos a un cuerpo de masa M se llega a la fórmula
M+m/f es la masa equivalente del sistema y f es un factor del orden de 3
Consideremos el primer modo de vibración
Cada punto x del muelle describe un MAS de frecuencia angular ξ1ω o periodo P1=2π/(ξ1ω)
Como k=mω2, despejamos el factor f de dicha ecuación
En la figura, representamos el factor f en función del cociente de masas m/M, para el primer modo de vibración, ξ1
m_M=0.01:0.01:3; %cociente m/M
factor=zeros(1,length(m_M));
hold on
n=0; %primer modo
i=1;
for c=m_M
f=@(x) c*cos(x)-x*sin(x);
xi=fzero(f,[n*pi+delta,n*pi+pi/2]);
factor(i)=c/(c/xi^2-1);
i=i+1;
end
plot(m_M,factor)
hold off
grid on
ylabel('f')
xlabel('m/M')
title('factor masa añadida')
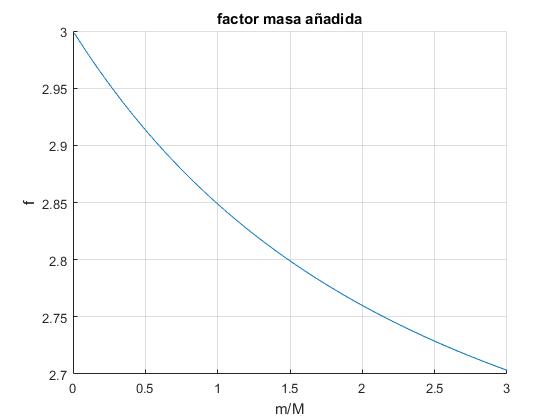
Cuando m/M→0, ξ1→0, véase la segunda figura titulada 'Tres primeros modos'. Llamemos x=m/M, e y=ξ1. La ecuación transcendente que relaciona ambas variables, se escribe tan(y)=x/y, por lo que f es
>> syms y; >> limit(y^2*tan(y)/(tan(y)-y),y,0) ans =3
Por tanto, cuando m/M→0, f→3
El factor f va disminuyendo a medida que se incrementa el cociente m/M. Cuando m/M→∞, ξ1→π/2 (véase la segunda figura titulada 'Tres primeros modos'), el factor f→(π/2)2=2.467
Se comprime un muelle y se suelta
Un muelle de longitud L sin deformar, de masa m y constante elástica k, se comprime l0 con un cuerpo de masa M. Se suelta en el instante t=0. Vamos a calcular la velocidad del cuerpo cuando el muelle recupera su longitud inicial, x=L. La fuerza que ejerce el muelle sobre el cuerpo será nula
Supondremos que el cuerpo desliza sobre el plano horizontal sin rozamiento
Donde ξn son las raíces de la ecuación transcendente, (m/M)cos(ξ)-ξsin(ξ)=0 y
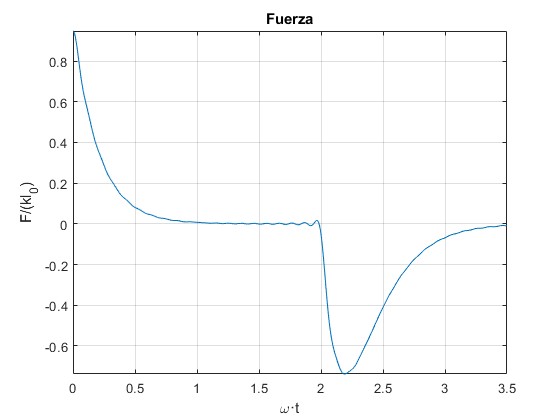
La fuerza F que ejerce el muelle elástico en sobre el cuerpo en x=L se hace nula en el instante T.
Representamos la fuerza F en x=L en función de ωt, tomando m/M=0.3
function muelle_6
m_M=0.3; %cociente m/M
f=@(x) m_M*cos(x)-x*sin(x);
xn=zeros(1, 20);
for n=0:length(xn)-1
xn(n+1)=fzero(f,[n*pi,n*pi+pi/2]);
end
function temp=fuerza(t)
temp=0;
for k=1:length(xn)
temp=temp+2*sin(xn(k))*cos(xn(k))*cos(xn(k)*t)/
(xn(k)*(1+sin(xn(k))^2/m_M));
end
end
fplot(@fuerza,[0,3.5])
grid on
xlabel('\omega·t')
ylabel('F/(kl_0)')
title('Fuerza')
end
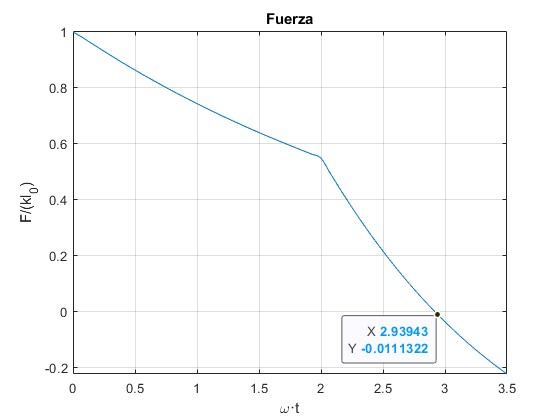
Cambiamos m/M=3
Calculamos el tiempo ωT resolviendo la ecuación transcendente
Para m/M>2.5, resulta difícil calcular el valor de ωT para el cual la fuerza se anula, tal como se puede apreciar en la segunda representación gráfica de la fuerza, ya que la fuerza es casi tangente al eje de los tiempos
La velocidad v en función del tiempo t es
La máxima velocidad vM del cuerpo se alcanza en el instante t=T. A partir de este instante, el cuerpo de masa M se mueve con dicha velocidad constante
Calculamos el tiempo ωT y representamos la velocidad v/(l0ω) en función de ωt. Calculamos la velocidad vM máxima del cuerpo
function muelle_5
m_M=0.3; %cociente m/M
f=@(x) m_M*cos(x)-x*sin(x);
xn=zeros(1, 20);
for n=0:length(xn)-1
xn(n+1)=fzero(f,[n*pi,n*pi+pi/2]);
end
function temp=tiempo(t)
temp=0;
for k=1:length(xn)
temp=temp+sin(xn(k))*cos(xn(k))*cos(xn(k)*t)/
(xn(k)*(1+sin(xn(k))^2/m_M));
end
end
T=fzero(@tiempo,[0,3]);
disp(T)
function v=velocidad(t)
v=0;
for k=1:length(xn)
v=v+2*sin(xn(k))^2*sin(xn(k)*t)/(xn(k)*
(1+sin(xn(k))^2/m_M));
end
end
fplot(@velocidad,[0,T])
disp(velocidad(T))
grid on
xlabel('\omega•t')
ylabel('v/(l_0\omega)')
title('Velocidad')
end
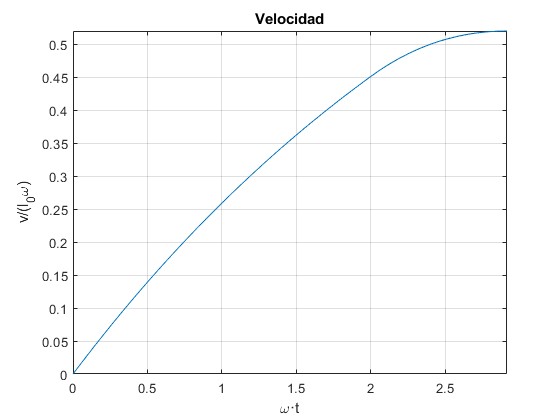
El tiempo ωT=2.9146 y la velocidad del cuerpo es vM=0.52
2.9146 0.5200
Referencias
Ye-Wan Ma, Zhao-Wang Wu, Li-Hua Zhang, Quan-Jin Liu, Xun-Chang Yin, Yong-Cai Shen. Theoretical study of the energy and oscillating period for uniformly distributed mass spring. Eur. J. Phys. 40 (2019) 035004. pp. 1-16.
Vladimir Ivchenko. The internal ballistics of a spring gun. Eur. J. Phys. 45 (2024) 045001