

Modos de vibración de una cuerda que cuelga
Sea una cuerda suspendida verticalmente, de longitud L y masa m y densidad uniforme m/L que tiene una partícula de masa M en su extremo inferior. El origen y los ejes se muestran en la figura. El punto de suspensión tiene de coordenadas z=L, e y=0.
La deducción de la ecuación del movimiento de un elemento de la cuerda (señalado en color rojo en la figura de la derecha) es similar a la de las ondas transversales en una cuerda, la diferencia es que la tensión de la cuerda es constante y aquí la tensión de la cuerda en la posición z es el peso de la parte de la cuerda por debajo de z.
T(z)=(mz/L)g+Mg
Consideremos una porción de cuerda comprendida entre z y z+dz
- T(z), es la fuerza que ejerce la parte de abajo de la cuerda sobre el elemento diferencial
- T(z+dz), es la fuerza que ejerce la parte de arriba de la cuerda sobre el elemento diferencial
Para deducir la ecuación del movimiento del elemento diferencial de la cuerda giramos los ejes, tal como se muestra en la figura
La componente Y de las fuerzas, dFy, que actúan sobre dicho elemento diferencial de masa m·dz/L+Mg es
Para ángulos pequeños, hacemos la aproximación sinθ≈tanθ
Esta componente dFy de fuerza sobre el elemento diferencial de masa m·dz/L produce una aceleración a lo largo del eje Y. Teniendo en cuenta que y es una función de z y t, escribimos, la segunda ley de Newton, fuerza=masa×aceleración
Separación de variables
Escribimos la solución como producto, y(z,t)=Φ(z)·T(t), lo que nos permite sustituir una ecuación en derivadas particiales por dos ecuaciones diferenciales, una que depende de la variable z y otra de la variable t
En la segunda ecuación diferencial, hacemos el cambio de variable
Finalmente, llegamos a la ecución diferencial de Bessel con n=0
La solución de la ecuación diferencial es
Estudiaremos los distintos casos
Modos de vibración de la cuerda que cuelga
Supongamos que se suprime la partícula, M=0, la relación entre las variables es , cuando z→0, x→0
La función Y0(x) tiende a -∞ cuando x→0. La solución es
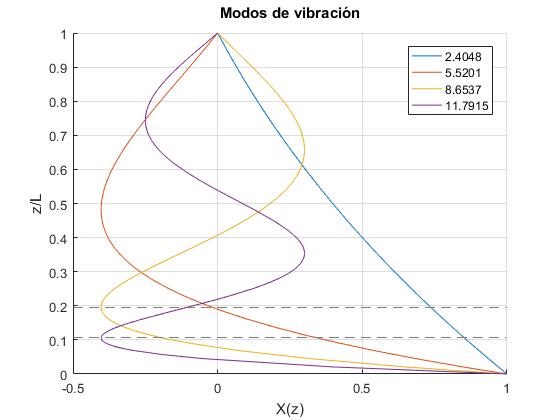
Dado que el punto de suspensión z=L, está fijo, Φ(L)=0, los posibles modos de vibración viene dados por las raíces ξn de la ecuación transcendente J0(ξ)=0
Obtenemos las raíces de la ecuación transcendente J0(ξ)=0, utilizando la función, raices, que se ha definido en la página titulada Funciones MATLAB para calcular las raíces de una ecuación
Representamos los cuatro primeros modos de vibración, con los ejes girados.
L=1; %longitud
x=linspace(1,12,10);
raiz=raices(@(x) besselj(0,x),x);
hold on
for xi=raiz
fplot(@(z) besselj(0,xi*sqrt(z/L)), [0,1],'displayName',num2str(xi));
end
hold off
grid on
view([90 -90]) %ejes girados
legend('-DynamicLegend','location','northeast')
xlabel('z/L')
ylabel('X(z)')
title('Modos de vibración')
Modos de vibración de la cuerda con la partícula
En este caso, M≠0, la relación entre las variables es , cuando z→0,
La solución de la ecuación diferencial incluye a J0(x) e Y0(x)
Llamando , la solución se expresa
El extremo inferior está fijo
Si el extremos inferior está fijo, las condiciones de contorno son: Φ(0)=0 y Φ(L)=0
Tenemos un sistema homogéno de dos ecuaciones
Despejamos B en la primera y sustituímos en la segunda.
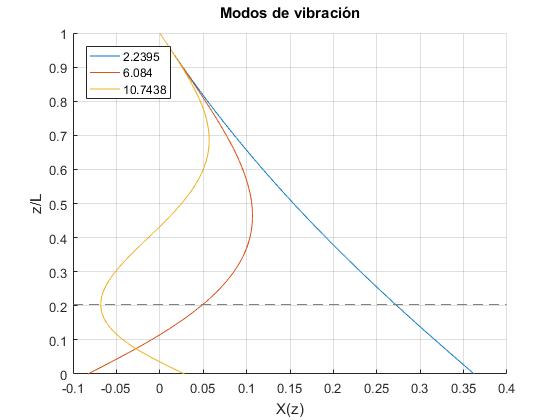
Calculamos las raíces de la ecuación transcendente, dado el cociente M/m y representamos Φ(z)
Φ(z) se multiplica por un factor de modo que
L=1; %longitud
q=0.25; %relación entre masas M/m
x=linspace(1,20,10);
f=@(x) besselj(0,sqrt(q)*x).*bessely(0,sqrt(1+q)*x)-
bessely(0,sqrt(q)*x).*besselj(0,sqrt(1+q)*x);
raiz=raices(f,x);
hold on
for xi=raiz
fx=@(z) bessely(0,sqrt(q)*xi)*besselj(0,xi*sqrt(z/L+q))-
bessely(0,xi*sqrt(z/L+q))* besselj(0,sqrt(q)*xi);
g=@(z) fx(z).*fx(z);
area=integral(g,0,L);
fx=@(z) fx(z)/sqrt(area);
fplot(fx, [0,1],'displayName',num2str(xi));
end
hold off
grid on
view([90 -90])
legend('-DynamicLegend','location','northwest')
xlabel('z/L')
ylabel('X(z)')
title('Modos de vibración')
Cuando x se hace grande las funciones J0(x) e Y0(x) tienden hacia
Sustituyendo en la ecuación transcendente J0(x) e Y0(x) por sus expresiones asintóticas, se simplifica notablemente
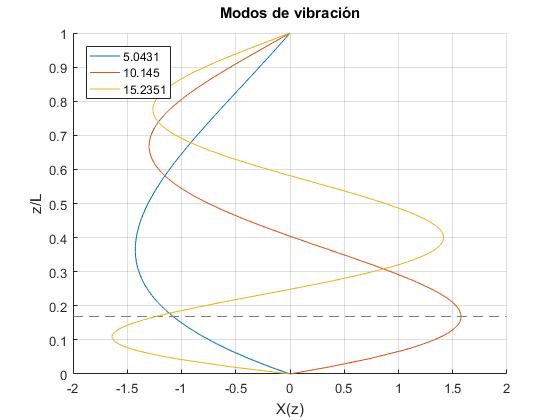
>>raiz
raiz = 5.0431 10.1450 15.2351 20.3219 25.4073
>> (1:5)*pi/(sqrt(1+q)-sqrt(q))
ans = 5.0832 10.1664 15.2496 20.3328 25.4160
Se obtienen unos valores de ξn bastante similares
El extremo inferior está libre
En la página titulada Modos de vibración de una cuerda con cuentas, estudiamos las vibraciones de una cuerda horizontal con una o más partículas (cuentas). Si la partícula de masa M está situada en la posición z0. La condición que deberá complir la función Φ(z) continua en z0, es
En este caso, la posición de la partícula de masa M es z0=0, la tensión por encima es el peso de la partícula Mg y por debajo, no hay cuerda
esta es la condición de contorno que sustituye a Φ(0)=0 (extremo fijo)
Teniendo en cuenta que las derivadas de las funciones de Bessel, y , la función Φ(z) y su derivada en z=0, valen
La condición de contorno en z=0, se expresa
que junto a la condicion de contorno en x=L, Φ(L)=0
constituyen un sistema homogéneo de dos ecuaciones, de las que se obtienen las raíces ξn y las frecuencias angulares ωn de los modos de vibración
Calculamos las raíces de la ecuación transcendente, conocido el cociente M/m y representamos Φ(z)
L=1; %longitud
q=0.25; %relación entre masas M/m
x=linspace(1,15,15);
f=@(x) bessely(0,sqrt(1+q)*x).*(sqrt(q)*x.*besselj(0,sqrt(q)*x)/2-
besselj(1,sqrt(q)*x))-besselj(0,sqrt(1+q)*x).*(sqrt(q)*x.
*bessely(0,sqrt(q)*x)/2-bessely(1,sqrt(q)*x));
raiz=raices(f,x);
hold on
for xi=raiz
fx=@(z) besselj(0,xi*sqrt(z/L+q))*bessely(0,sqrt(1+q)*xi)-
bessely(0,xi*sqrt(z/L+q))* besselj(0,sqrt(1+q)*xi);
fplot(fx, [0,1],'displayName',num2str(xi));
end
hold off
grid on
view([90 -90])
legend('-DynamicLegend','location','northwest')
xlabel('z/L')
ylabel('X(z)')
title('Modos de vibración')
Referencias
Y Verbin. Boundary conditions and modes of the vertically hanging chain. Eur. J. Phys. 36 (2015) 015005