

Modos de vibración de una cuerda con un resonador
Esta página, es similar a la primera parte de la página titulada Modos de vibración de una cuerda con cuentas dedicada al cálculo de las frecuencias de los modos de vibración. Por lo que recomendamos que se lea antes.
El resonador en posición simétrica
Sea una cuerda de longitud 2L y densidad lineal μ0=m/L, sujeta por ambos extremos, cuya tensión es T en la que se colocado una masa puntual M unida a un muelle elástico de constante K en su punto medio (un resonador), tal como se muestra en la figura.
La fuerza sobre la partícula de masa M situada en la mitad de la cuerda x=L y unida a un muelle de constante elástica K que se ha deformado y es
Hemos aplicado la segunda ley de Newton, fuerza =masa×aceleración
Escribimos la solución de la ecuación diferencial en derivadas parciales como producto, y(x,t)=Φ(x)·cos(ωt)
Consideramos que la tensión T(x)=T de la cuerda es constante, su densidad μ0=m/L es constante.
El término, bajo la raíz cuadrada es la velocidad de propagación de las ondas transversales en una cuerda. La solución de esta ecuación diferencial tiene la forma conocida, Asin(kx)+Bcos(kx)
La masa puntual M situada en la posición x=L, divide a la cuerda en dos partes. Probamos la solución
Los extremos de la cuerda x=0 y x=2L son fijos. Φ(0)=0 y Φ(2L)=0, por lo que el coeficiente B=0 y se cumplirá que, Csin(kL)+Dcos(kL)=0
En x=L se ha situado una masa puntual M, la función Φ(x) es continua en este punto
Asin(kL)=D
Modos de vibración de orden par
Combinando esta relación con la relación entre los coeficientes C y D,
Una solución es
sin(kL)=0, knL=nπ, n=1,2,3...
Sabiendo que k=2π/λ, 2L=nλn, un número entero de longitudes de onda cabe en la cuerda de longitud 2L sujeta por ambos extremos, estos son los modos pares de vibración de la cuerda
La otra solución es, C=-Acos(kL)
Modos de vibración de orden impar
Por otra parte, la función Φ(x) ha de satisfacer la condición
Resolvemos esta ecuación transcendente para obtener las raíces knL
Casos particulares
La masa de la partícula es nula, M=0, solamente tenemos el muelle elástico de constante K
Las raíces knL son los puntos de intersección de la recta y=-ax y de y=tan(x) con x=kL y a=4T/(LK).
fplot(@(x) tan(x), [0, 2*pi])
a=0.5;
line([0, 2*pi],[0,-2*a*2*pi], 'color','r')
ylim([-15,5])
set(gca,'XTick',0:pi/2:2*pi)
set(gca,'XTickLabel',{'0','\pi/2','\pi','3\pi/2','2\pi'})
grid on
xlabel('kL/2')
ylabel('y')
title('Raíces de la ecuación')
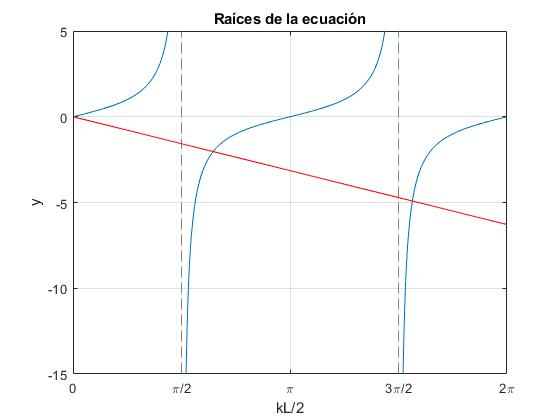
K pequeño: Para pequeños valores de la constante elástica del muelle, K, la pendiente a de la recta es grande y las raíces están próximas a los valores x para los que tan(x) se hace -∞: π/2, 3π/2, ... (2n+1)π/2.
Un muelle de constante K pequeña no afecta a la cuerda.
K grande: Cuando la constante del muelle K se incrementa, la pendiente a disminuye, y las raíces knL se incrementan. Cuando K tiende a infinito, a tiende a cero y las raíces knL tienden a π, 2π, ...nπ, donde la tangente se hace cero. Dado que la constante del muelle K es muy grande, la partícula de masa M situada en x=L permanecerá en reposo
Las frecuencias del modos impares se confunden con las frecuencias de los modos pares.
Cuando K=0, el muelle desaparece y solamente queda la masa puntual M, que ya hemos estudiado en la la página titulada Modos de vibración de una cuerda con cuentas
Modos de vibración
-
Para los modos pares knL=nπ, sin(knL)=0, D=0
-
Para los modos impares, knL, son las raíces de la ecuación transcendente
Determinamos el valor del coeficiente A de modo que
El resultado de la inetgral es
Despejamos los coeficientes C y D en términos de A
D=Asin(kL)
C=-Acos(kL)
Determinamos el valor del coeficiente A de modo que
Resolvemos la ecuación transcendente
Utilizamos la función
En este script calculamos cinco modos de vibración mediante la primera fórmula, knL=nπ, cinco mediante la segunda (resolviendo la ecuación transcendente). Utilizamos la función sort de MATLAB para ordenar los diez primeros modos de vibración
r=(1:5)*pi; %par M_m=1; %cociente M/m K=0.5; %proporcional a la constante K del muelle f=@(x) (M_m*x-K./x).*sin(x)-2*cos(x); x=linspace(0,20,20); k=raices(f,x); %impar K=[k,r]; sort(K) %ordenados
1.1984 3.1416 3.6581 6.2832 6.5814 9.4248 9.6306 12.5664 12.7228 15.7080 15.8339 18.9548
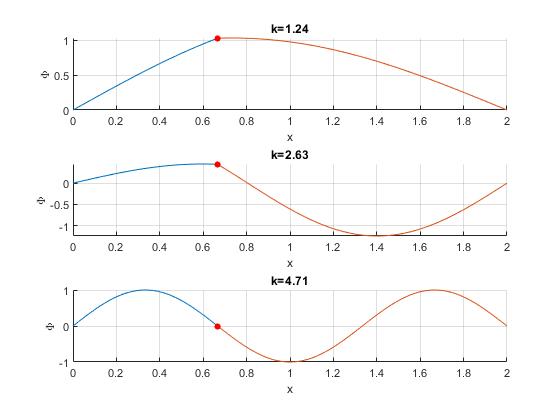
Representamos los tres primeros modos de vibración para M/m=1 y KL/T=0.5
L=1; %longitud de la cuerda 2L
M_m=1; %relación entre masas
K=0.5; % porporcional a la constante del muelle K
f=@(x) (M_m*x-K./x).*sin(x)-2*cos(x);
subplot(3,1,1)
k=fzero(f,1);
hold on
area=L-sin(2*k*L)/(2*k);
fplot(@(x) sin(k*x)/sqrt(area),[0,L])
fplot(@(x) sin(k*(2*L-x))/sqrt(area),[L,2*L])
plot(L,sin(k*L)/sqrt(area),'ro','markersize',4,'markeredgecolor','r',
'markerfacecolor','r')
hold off
grid on
xlabel('x')
ylabel('\Phi')
title(sprintf('k=%1.2f',k))
k=pi/L;
subplot(3,1,2)
hold on
fplot(@(x) sin(k*x),[0,2*L])
plot(L,0,'ro','markersize',4,'markeredgecolor','r','markerfacecolor','r')
hold off
grid on
xlabel('x')
ylabel('\Phi')
title(sprintf('k=%1.2f',pi/L))
k=fzero(f,4);
subplot(3,1,3)
hold on
area=L-sin(2*k*L)/(2*k);
fplot(@(x) sin(k*x)/sqrt(area),[0,L])
fplot(@(x) sin(k*(2*L-x))/sqrt(area),[L,2*L])
plot(L,sin(k*L)/sqrt(area),'ro','markersize',4,'markeredgecolor','r',
'markerfacecolor','r')
hold off
grid on
xlabel('x')
ylabel('\Phi')
title(sprintf('k=%1.2f',k))
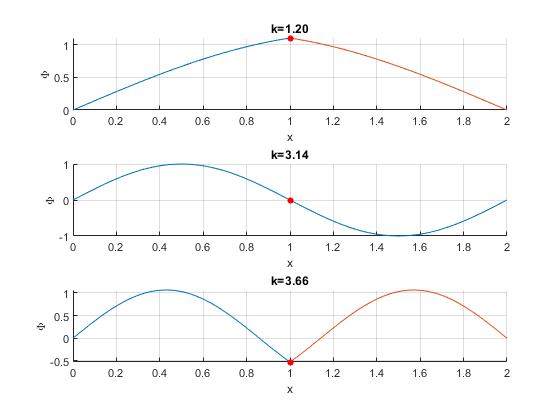
Observamos que para los modos impares, la función Φ(x) es continua y también su derivada. La partícula pernanece en reposo, no vibra, en un nodo. Para los modos pares, la función Φ(x) es continua pero no lo es su derivada, la partícula oscila.
El resonador en cualquier posición
Consideremos ahora que la partícula de masa M unida al muelle elástico de constante K (el resonador) está situado en la posición b, en la mitad izquerda de la cuerda. Veremos que esto afecta a las frecuencias de los modos de vibración de orden par e impar y como se modifica el aspecto de los modos normales de vibración.
La segunda ley de Newton aplicada a la partícula de masa M se escribe
Escribimos la solución de la ecuación diferencial en derivadas parciales como producto, y(x,t)=Φ(x)·cos(ωt)
Consideramos que la tensión T(x)=T de la cuerda es constante, su densidad μ0=m/L es constante.
El término, bajo la raíz cuadrada es la velocidad de propagación de las ondas transversales en una cuerda.
La solución de esta ecuación diferencial tiene la forma conocida, Asin(kx)+Bcos(kx). Probamos la solución
Los extremos de la cuerda x=0 y x=2L son fijos. Φ(0)=0 y Φ(2L)=0, por lo que el coeficiente B=0 y se cumplirá que, Csin(k(2L-b))+Dcos(k(2L-b))=0
En x=b se ha situado una masa puntual M, la función Φ(x) es continua en este punto
Asin(kL)=D
De estas dos relaciones despejamos C en función de A
Cuando el resonador está situado en un nodo, sin(kb)=0 y también sin(k(2L-b))=0. Tenemos una indeterminación 0/0. En este caso, C=Acos(2L-b))·(-1)n, siendo n el modo de vibración de orden n. Para b=L punto medio de la cuerda, C=-Acos(kL), tal como hemos visto en el apartado anterior.
Modos de vibración
Obtenemos la siguiente ecucación transcendente
Expresamos la ecuación transcendente de la forma
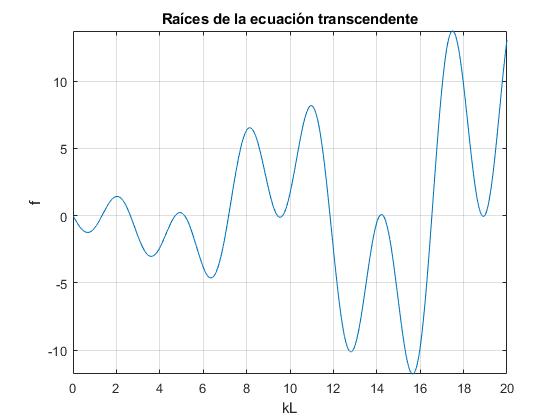
Representamos esta función f(kL) para darnos cuenta de las dificultades del procedimiento del punto medio para calcular algunas raíces de esta ecuación transcendente. La función es casi tangente al eje X para ciertos valores de kL
L=1; %longitud
M_m=1; %relación entre masas
K=1; % porporcional a la constante del muelle K
b=2/3; %b/L posición del resonador
f=@(x) (M_m*x-K./x).*(sin(x*b).*sin(x*(2-b)))-sin(2*x);
fplot(f,[0,20])
grid on
xlabel('kL')
ylabel('f')
title('Raíces de la ecuación transcendente')
Cuando b=L. Obtenemos la relación estudiada en el primer apartado
Para representar el modo de vibración n, Φn(x) los coeficientes C y D dependen de A. Fijamos A de modo que
El resultado de calcular las integrales es
L=1; %longitud
M_m=1; %relación entre masas
K=1; % porporcional a la constante del muelle K
b=0.5; %b/L posición del resonador
f=@(x) (M_m*x-K./x).*(sin(x*b).*sin(x*(2-b)))-sin(2*x);
x=linspace(0,20,50);
r=raices(f,x); %impar
for i=1:4
subplot(4,1,i)
k=r(i);
if sin(k*b)<1e-5
C=cos(k*(2-b))*(-1)^i;
else
C=-sin(k*b)*cos(k*(2-b))/sin(k*(2-b));
end
D=sin(k*b);
area=(b-sin(2*k*b)/(2*k))/2+C^2*(2*L-b-sin(2*k*(2*L-b))/(2*k))/2+
C*D*(1-cos(2*k*(2*L-b)))/(2*k)+D^2*(2*L-b+sin(2*k*(2*L-b))/(2*k))/2;
hold on
fplot(@(x) sin(k*x/L)/sqrt(area),[0,b*L])
fplot(@(x) (C*sin(k*(x/L-b))+D*cos(k*(x/L-b)))/sqrt(area),[b*L, 2*L])
plot(b*L,sin(k*b)/sqrt(area),'ro','markersize',4,'markeredgecolor',
'r','markerfacecolor','r')
hold off
grid on
xlabel('x')
ylabel('\Phi')
title(sprintf('k=%1.2f',k))
end
En el segundo modo de vibración, la cuerda presenta un nodo (no vibra) en la mitad de la cuerda 2L/2=L. Si situamos el resonador en b=L, la cuerda no se verá afectada. Se ha estudiado en el apartado anterior
En el tercer modo de vibración, la cuerda presenta nodos en los puntos 2L/3 y 4L/3. Si situamos el resonador en b=2L/3, la cuerda no se verá afectada.
...
Actividades
Se introduce
El cociente de masas M/m (masa puntual dividido por la masa de una porción de la cuerda de longitud L) en el control titulado Masa M/m
El valor del parámetro KL/T donde K es la constante elástica del muelle y T la tensión de la cuerda, en el control titulado Parámetro
La posición b del resonador, en la mitad izquierda de la cuerda, en el control titulado Posición resonador. (En la mitad derecha, daría los mismos resultados)
La longitud de la porción L de cuerda se ha fijado en L=1 m
La velocidad de propagación de las ondas trasversales en la cuerda se ha fijado en v=1 m/s. El valor numérico del número de onda k coincide con el valor de la frecuencia angular ω, la frecuencia de los distintos modos de vibración f=ω/(2π)
Se pulsa el botón titulado Nuevo
Se pulsa el botón titulado >>, para observar el siguiente modo de vibración.
Se pulsa el botón titulado <<, para observar el modo de vibración anterior
En la parte superior, se muestra el modo de vibración y su frecuencia f en Hz.
Para ver los modos de vibración descritos en el primer apartado de esta página, introducir en el control titulado Posición resonador, b=1. Otras posiciones del resonador en los nodos son b=2/3≈0.6667, 0.5, 0.25, ... Debido a la dificultad antes mencionada, para encontrar las raíces de la ecuación transcendente, el programa interactivo puede no dar buenos resultados para posiciones del resonador en otros nodos
Referencias
V. Migulin. V. Medvedev. E. Mustel. V. Parygin. Basic theory of oscillations. Mir Publishers Moscow. 1983. pp. 330-335.