

Modos de vibración de una cuerda con cuentas
Sea una cuerda de longitud 2L y densidad lineal μ0=m/L, sujeta por ambos extremos, cuya tensión es T en la que se colocado una masa puntual (una cuenta) M en su punto medio.
Fuerza sobre un elemento diferencial de cuerda
Consideremos una porción de cuerda comprendida entre x y x+dx
T(x), es la fuerza que ejerce la parte izquierda de la cuerda sobre el elemento diferencial
T(x+dx), es la fuerza que ejerce la parte derecha de la cuerda sobre el elemento diferencial
La componente Y de las fuerzas, dFy, que actúan sobre dicho elemento diferencial es
Para ángulos pequeños, hacemos la aproximación sinθ≈tanθ
Esta componente dFy de fuerza sobre el elemento diferencial de masa μ(x)dx produce una aceleración a lo largo del eje Y. Teniendo en cuenta, y es una función continua de x y t escribimos, la segunda ley de Newton, fuerza=masa×aceleración
Donde μ(x) es la densidad de una cuerda no homogénea y T(x) es la tensión en cada punto de la cuerda
y(x,t) es una función continua de x y su derivada dy/dx también lo es.
Fuerza sobre una masa puntual situada en la cuerda
Consideremos una masa puntual Mi sujeta a la cuerda en la posición xi
Como vemos en la figura, en un instante t, la función y(x) es continua pero no su derivada dy/dx en xi
La componente Y de las fuerzas, Fy, que actúan sobre dicha partícula es
T es la fuerza que ejerce la parte izquierda de la cuerda sobre la partícula y T' es la fuerza que ejerce la parte derecha de la cuerda sobre la partícula. θ1 y θ2 son las direcciones de dichas fuerzas, tangentes a la cuerda en el punto xi
La segunda ley de Newton a lo largo del eje Y se escribe
Modos de vibración de una cuerda con una cuenta
Escribimos la solución de la ecuación diferencial en derivadas parciales como producto, y(x,t)=Φ(x)·cos(ωt)
Consideramos que la tensión T(x)=T de la cuerda es constante, su densidad μ0=m/L es constante y la posición de la cuenta de masa M es xi=L.
El término, bajo la raíz cuadrada es la velocidad de propagación de las ondas transversales en una cuerda. La solución de esta ecuación diferencial tiene la forma conocida, Asin(kx)+Bcos(kx)
La masa puntual M situada en la posición x=L, divide a la cuerda en dos partes. Probamos la solución
-
Los extremos de la cuerda x=0 y x=2L son fijos. Φ(0)=0 y Φ(2L)=0, por lo que el coeficiente B=0 y se cumplirá que, Csin(kL)+Dcos(kL)=0
En x=L se ha situado una masa puntual M, la función Φ(x) es continua en este punto
Por otra parte, la función Φ(x) ha de satisfacer la condición
Asin(kL)=D
Con la relación anterior entre los coeficientes C y D,
Una solución es
sin(kL)=0, knL=nπ, n=1,2,3...
Sabiendo que k=2π/λ, 2L=nλn, un número entero de longitudes de onda cabe en la cuerda de longitud 2L sujeta por ambos extremos, estas son los modos normales de vibración pares de la cuerda
La otra solución es, C=-Acos(kL)
Donde ω=kv, la velocidad de propagación v2=T/μ0, la densidad lineal de la cuerda μ0=m/L. 2m es la masa de la cuerda de longitud 2L
En la figura, se muestran los modos de vibración de una cuerda de longitud 2L. Los modos de vibración de orden par n=2,4,6,... presentan un nodo en x=L
Por tanto, los valores de knL se obtienen de dos ecuaciones
sin(kL)=0, cuya solución es
Para los modos de vibración de orden impar, calculamos las raíces knL de la ecuación transcendente
knL=nπ, n=1,2,3,...
2L=nλ. Estos son los modos de vibración de orden par que no resultan modificados por la presencia de la cuenta, ya que está situada en un nodo
-
Para los modos pares knL=nπ, sin(knL)=0, D=0
-
Para los modos impares knL raíces de la ecuación transcendente
Despejamos los coeficientes C y D en términos de A
D=Asin(kL)
C=-Acos(kL)
Representamos la función , para el valor M/m=1. Se sugiere cambiar este valor para apreciar el efecto de la masa M de la partícula
L=1; %longitud
M_m=1; %cociente masas
f=@(x) M_m*x.*sin(x)-2*cos(x);
fplot(f,[0,10])
grid on
xlabel('kL')
ylabel('y');
title('Cuerda con una cuenta')
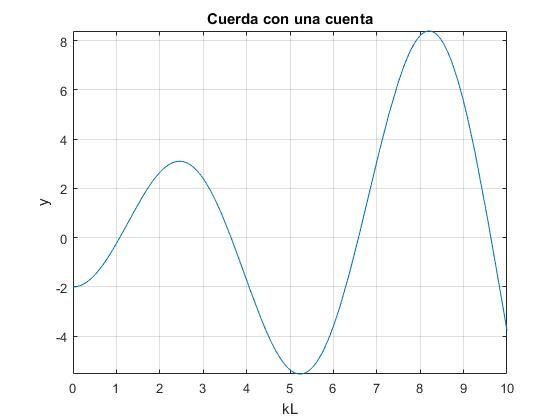
Las raíces son los puntos de corte con el eje X. Utilizamos la función
M_m=1; %cociente M/m f=@(x) M_m*x.*sin(x)-2*cos(x); x=linspace(0,20,20); k=raices(f,x); % raíces disp(k);
1.0769 3.6436 6.5783 9.6296 12.7223 15.8336 18.9547
Modos de vibración
Modos pares
Modos impares
Determinamos el valor del coeficiente A de modo que
El resultado de la integral es
knL son las raíces de la ecuación transcendente
Determinamos el valor del coeficiente A de modo que
Resolvemos la ecuación transcendente
En este script calculamos cinco modos de vibración mediante la primera fórmula, cinco mediante la segunda y utilizamos la función
r=(1:5)*pi; %par M_m=1; %cociente M/m f=@(x) M_m*x.*sin(x)-2*cos(x); x=linspace(0,15,10); k=raices(f,x); %impar K=[k,r]; sort(K) %ordenados
ans = 1.0769 3.1416 3.6436 6.2832 6.5783 9.4248 9.6296 12.5664 12.7223 15.7080
Calculamos las raíces de forma gráfica
Las raíces knL son la intersección de la función y=tan(x) y de la hipérbola y=a/x.
hold on
fplot(@(x) tan(x), [0, 2*pi])
fplot(@(x) 1./x, [0,2*pi])
hold off
ylim([-2,15])
set(gca,'XTick',0:pi/2:2*pi)
set(gca,'XTickLabel',{'0','\pi/2','\pi','3\pi/2','2\pi'})
grid on
xlabel('kL/2')
ylabel('y')
title('Raíces de la ecuación')
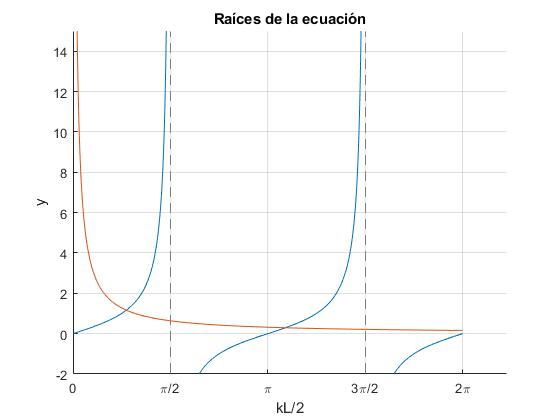
Cuando la masa M de la partícula es muy grande, el parámetro a es muy pequeño y las raíces knL del tercero, quinto, etc. modo de vibración tienden a π, 2π, 3π, ...
La frecuencia del primer modo es cada vez más pequeña a medida que la masa de la partícula M aumenta. La frecuencia de los modos impares tiende hacia la frecuencia de los modos pares
Cuando M/m es grande, por ejemplo, M/m=10. La frecuencia del segundo y tercer modo casi coinciden, lo mismo la del cuarto con el quinto, etc.
... M_m=10; %cociente M/m ...
0.4328 3.1416 3.2039 6.2832 6.3148 9.4248 9.4459 12.5664 12.5823 15.7080
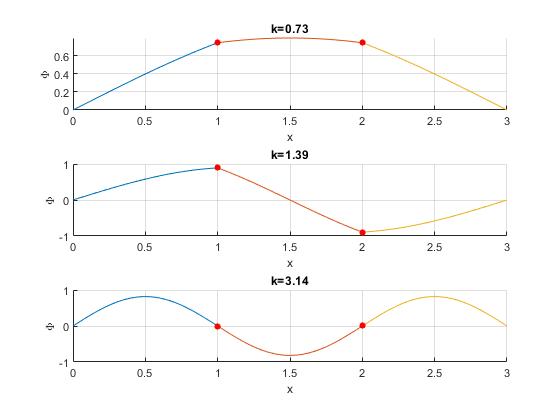
Representamos los tres primeros modos de vibración para M/m=1
L=1; %longitud
M_m=1; %relación entre masas
f=@(x) M_m*x.*sin(x)-2*cos(x);
subplot(3,1,1)
k=fzero(f,1);
area=L-sin(2*k*L)/(2*k);
hold on
fplot(@(x) sin(k*x)/sqrt(area),[0,L])
fplot(@(x) sin(k*(2*L-x))/sqrt(area),[L,2*L])
plot(L,sin(k*L)/sqrt(area),'ro','markersize',4,'markeredgecolor','r'
,'markerfacecolor','r')
hold off
grid on
xlabel('x')
ylabel('\Phi')
title(sprintf('k=%1.2f',k))
k=pi/L;
subplot(3,1,2)
hold on
fplot(@(x) sin(k*x),[0,2*L])
plot(L,0,'ro','markersize',4,'markeredgecolor','r','markerfacecolor','r')
hold off
grid on
xlabel('x')
ylabel('\Phi')
title(sprintf('k=%1.2f',pi/L))
k=fzero(f,4);
area=L-sin(2*k*L)/(2*k);
subplot(3,1,3)
hold on
fplot(@(x) sin(k*x)/sqrt(area),[0,L])
fplot(@(x) sin(k*(2*L-x))/sqrt(area),[L,2*L])
plot(L,sin(k*L)/sqrt(area),'ro','markersize',4,'markeredgecolor','r',
'markerfacecolor','r')
hold off
grid on
xlabel('x')
ylabel('\Phi')
title(sprintf('k=%1.2f',k))
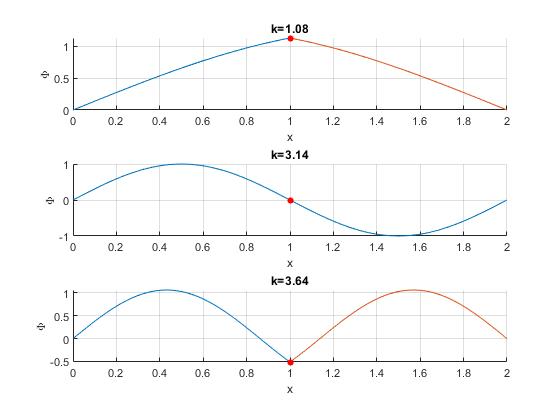
Observamos que para los modos impares, la función Φ(x) es continua y también su derivada. La partícula pernanece en reposo, no vibra, en un nodo. Para los modos pares, la función Φ(x) es continua pero no lo es su derivada, la partícula oscila.
Actividades
Se introduce
- El cociente de masas M/m (masa puntual dividido por la masa de una porción de la cuerda de longitud L) en el control titulado Masa M/m
- La longitud de la porción L de cuerda se ha fijado en L=1 m
- La velocidad de propagación de las ondas trasversales en la cuerda se ha fijado en v=1 m/s. El valor numérico del número de onda k coincide con el valor de la frecuencia angular ω, para calcular la frecuencia de los distintos modos de vibración f=ω/(2π)
Se pulsa el botón titulado Nuevo
Se pulsa el botón titulado >>, para observar el siguiente modo de vibración.
Se pulsa el botón titulado <<, para observar el modo de vibración anterior
En la parte superior, se muestra el modo de vibración y su frecuencia f en Hz.
Condiciones iniciales
La solución general y(x,t) que satisface la ecuación diferencial del movimiento ondulatorio
con las condiciones de contorno y(0,t)=0 e y(2L,t)=0 es
Esta ecuación describe todos los posibles modos de vibración de la cuerda. La vibración particular que experimenta la cuerda está únicamente determinada por las condiciones iniciales, que a su vez determinan los valores de las constantes An y Bn.
Supongamos que la cuerda se estira desde su punto medio donde se encuentra la cuenta, hasta adoptar la forma inicial la siguiente.
Como velocidad inicial de la cuerda es nula, los coeficientes Bn=0.
Las relaciones de ortogonalidad de Φn(x) para una cuerda no homogénea de densidad μ(x)
Para una cuerda homogénea de densidad μ0 con una cuenta de masa M situada en x=L se escribe
Nota: Formalmente, la densidad de la cuerda uniforme con una cuenta en x=L se escribe
Véase la función delta de Dirac δ(x) al final de la página titulada Transformada de Fourier
Utilizamos la relación de ortogonalidad de las funciones Φn(x) y Φm(x) para calcular los coeficientes An
Primero, calculamos An cuando knL es un múltiplo entero de π, sin(knL)=0, Φn(x)=Asin(knx), 0≤x<2L
Calculamos An cuando knL es una raíz de la ecuación transcendente
Utilizamos la integral por partes
El resultado final es An=0
y Φn(x) es la función
Realizamos las operaciones siguientes
Utilizamos la integral por partes y la ecuación transcendente, el resultado final es
La forma de la cuerda es en el instante t es
knL son las raíces de la ecuación transcendente.
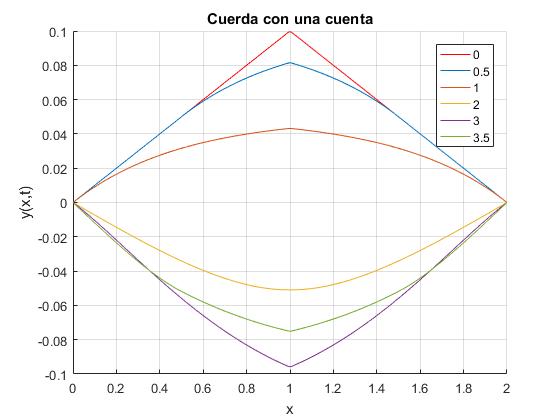
Elaboramos un script, para representar la forma de la cuerda con una cuenta en su punto medio, para varios instantes. La longitud de la cuerda 2L= 2, la deformación máxima de la cuerda es h=0.1 y la relación de masas M/m=1. (M es la masa de la partícula y μ0=m/L la densidad lineal de la cuerda). Se sugiere cambiar este parámetro y observar sus efectos por ejemplo, para M/m=0.5 y M/m=2.
El periodo o tiempo que tarda en viajar una perturbación desde un extremo a otro de la cuerda y regresar al punto de partida es τ=4L/v. Donde v=1 es la velocidad de propagación. Representamos la forma de la cuerda en los instantes t/τ=0 (forma inicial), 0.5, 1, 2, 3, 3.5
M_m=1;%relación entre masas M/m
L=1; %longitud de la cuerda
h=0.1; %deformación de la cuerda
f=@(x) M_m*x.*sin(x)-2*cos(x);
x=linspace(0.1,60,50);
k=raices(f,x); %20 raíces
An=2*h*sin(k*L)./(((k*L).^2).*(1+M_m*sin(k*L).^2/2)); %coeficientes
hold on
x=linspace(0,2*L,200);
%forma inicial
y=(h*x/L).*(heaviside(x)-heaviside(x-L))+(2*h*(1-x/(2*L))).*
(heaviside(x-L)-heaviside(x-2*L));
plot(x,y, 'r','displayName',num2str(0))
for t=[0.5,1,2,3,3.5]
yy=zeros(1,length(x));
for n=1:length(k)
yy=yy+An(n)*(sin(k(n)*(x<=L).*x)-sin(k(n)*(x>L).*(x-2*L)))*cos(k(n)*t/L);
end
plot(x,yy, 'displayName',num2str(t))
end
hold off
grid on
legend('-DynamicLegend','location','northeast')
xlabel('x')
ylabel('y(x,t)')
title('Cuerda con una cuenta')
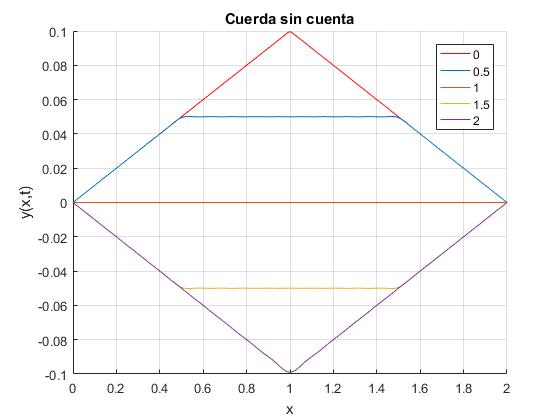
Modificamos el script para representar la forma de la cuerda sin cuenta M/m=0, en los instantes t/τ=0 (forma inicial), 0.5, 1, 1.5, 2. Comprobamos que vuelve a la forma inicial en el instante t/τ=4
Actividades
Se introduce
- El cociente de masas M/m (masa puntual dividido por la masa de una porción de la cuerda de longitud L) en el control titulado Masa M/m
- La longitud de la porción L de cuerda se ha fijado en L=1 m
- La velocidad de propagación de las ondas trasversales en la cuerda se ha fijado en v=1 m/s.
Se pulsa el botón titulado Nuevo
Dos partículas sujetas a la cuerda
Consideremos una cuerda homogénea de longitud 3L y densidad uniforme m/L con dos masas puntuales M situadas en las posiciones x=L y x=2L tal como se muestra en la figura.
Las masas puntuales M situadas en la posiciones x=L y x=2L, dividen a la cuerda en tres partes. Probamos la solución
-
Los extremos de la cuerda x=0 y x=3L son fijos. Φ(0)=0 y Φ(3L)=0, por lo que el coeficiente B=0, y se cumplirá que Esin(kL)+Fcos(kL)=0
En x=L se ha situado una masa puntual M, la función Φ(x) es continua en este punto
Por otra parte, la función Φ(x) ha de satisfacer la condición
En x=2L se ha situado una masa puntual M, la función Φ(x) es continua en este punto
Por otra parte, la función Φ(x) ha de satisfacer la condición
Asin(kL)=D
Expresamos esta ecuación
Csin(kL)+Dsin(kL)=F
Tenemos un sistema de cinco ecuaciones homogéneas con cinco incógnitas
El determinante de la matriz de los coeficientes deberá ser cero
Llamamos x a kL y q al cociente M/m
>> syms q x; >> M=[0,0,0,sin(x),cos(x); sin(x),0,-1,0,0;-cos(x),1,q*x,0,0; 0,sin(x),cos(x),0,-1;0,-cos(x),sin(x),1,q*x]; >> eq=det(M); >> factor(eq) ans =[ sin(x), 3*cos(x)^2 - sin(x)^2 + q^2*x^2*sin(x)^2 - 4*q*x*cos(x)*sin(x)]
La segunda expresión entre corchetes, se escribe, 4cos(x)2 - 1 + q2x2sin(x)2 - 4qxcos(x)sin(x). Comprobamos que es el producto de (qxsin(x)-2cos(x)+1)(qxsin(x)-2cos(x)-1).
>> eq=4*cos(x)^2 - 1 + q^2*x^2*sin(x)^2 - 4*q*x*cos(x)*sin(x); >> factor(eq) ans =[ q*x*sin(x) - 2*cos(x) + 1, q*x*sin(x) - 2*cos(x) - 1]
El determinante es el producto de tres factores
Los valores de knL se obtienen de tres ecuaciones
sin(kL)=0, cuya solución es
Las raíces knL de la ecuación transcendente
Las raíces knL de la ecuación transcendente
knL=nπ, n=1,2,3,...
Calculamos cuatro raíces knL de cada una de las tres ecuaciones. Las ordenamos mediante la función sort de MATLAB
L=1; M_m=1; %cociente masas %primera función f=@(x) M_m*x.*sin(x)-2*cos(x)+1; x=linspace(0,10,50); r1=raices(f,x); disp(r1); %segunda función g=@(x) M_m*x.*sin(x)-2*cos(x)-1; x=linspace(0,10,50); r2=raices(g,x); disp(r2); r3=(1:4)*pi/L; disp(r3) r=[r1,r2,r3]; sort(r)
0.7314 3.8528 6.4356 9.7284
1.3876 3.4159 6.7158 9.5288
3.1416 6.2832 9.4248 12.5664
ans = 0.7314 1.3876 3.1416 3.4159 3.8528 6.2832 6.4356
6.7158 9.4248 9.5288 9.7284 12.5664
Despejamos los coeficientes C, D, E y F del sistema de ecuaciones
Cuando knL=nπ, sin(kL)=0, los coeficientes, D=0, C=Acos(kL), F=0 y E=Acos2(kL)=A
Modos de vibración
Los coeficientes C, D, E, F se expresan en términos de A
Determinamos el valor del coeficiente A de modo que
El resultado de calcular las integrales es
Representamos los tres primeros modos de vibración cuyos valores k1=0.7314, k2=1.3876, k3=3.1416, hemos calculado
L=1; %longitud
M_m=1; %relación entre masas
A=1;
i=1;
for k=[0.7314, 1.3876, 3.1416]
subplot(3,1,i)
D=A*sin(k*L);
C=A*cos(k*L)-M_m*(k*L)*D;
F=C*sin(k*L)+D*cos(k*L);
E=C*cos(k*L)-D*sin(k*L)-M_m*(k*L)*F;
area=(A^2+C^2+D^2+E^2+F^2)/2+(-A^2-C^2+D^2-E^2+F^2)*sin(2*k*L)/(4*k)+
(C*D+E*F)*(1-cos(2*k*L))/(2*k);
f1=@(x) sin(k*x)/sqrt(area);
f2=@(x) (C*sin(k*(x-L))+D*cos(k*(x-L)))/sqrt(area);
f3=@(x) (E*sin(k*(x-2*L))+ F*cos(k*(x-2*L)))/sqrt(area);
hold on
fplot(f1,[0,L])
fplot(f2,[L,2*L])
fplot(f3,[2*L,3*L])
plot(L,f1(L),'ro','markersize',4,'markeredgecolor','r','markerfacecolor','r')
plot(2*L,f2(2*L),'ro','markersize',4,'markeredgecolor','r','markerfacecolor','r')
hold off
grid on
xlabel('x')
ylabel('\Phi')
title(sprintf('k=%1.2f',k))
i=i+1;
end
La tercera figura representa el tercer modo de vibración de una cuerda de longitud 3L. Para los modos múltiplos de tres, la función Φ(x) es continua y también su derivada. La partícula pernanece en reposo, no vibra, en un nodo. Para los otros modos, la función Φ(x) es continua pero no lo es su derivada, la partícula oscila.
Actividades
Se introduce
- El cociente de masas M/m (masa puntual dividido por la masa de una porción de la cuerda de longitud L) en el control titulado Masa M/m
- La longitud de la porción L de cuerda se ha fijado en L=1 m
- La velocidad de propagación de las ondas trasversales en la cuerda se ha fijado en v=1 m/s. El valor numérico del número de onda k coincide con el valor de la frecuencia angular ω, para calcular la frecuencia de los distintos modos de vibración f=ω/(2π)
Se pulsa el botón titulado Nuevo
Se pulsa el botón titulado >>, para observar el siguiente modo de vibración.
Se pulsa el botón titulado <<, para observar el modo de vibración anterior
En la parte superior, se muestra el modo de vibración y su frecuencia f en Hz.
Referencias
Gómez B. J. Repetto C. E., Stia C. R., Welti R. Oscillations of a string with concentrated masses. Eur. J. Phys. 28 (2007) pp. 961-975