

Equilibrio del movimiento de rotación y traslación de un satélite alrededor de su planeta
Estudiamos un sistema aislado formado por dos cuerpos celestes de masas m1 y m2 que se mueven bajo su fuerza de interacción mutua, alrededor del centro de masas, c. m. en reposo. Además los cuerpos giran alrededor de sus ejes (perpendiculares al plano de las órbitas) con velocidad angular ω1 y ω2, respectivamente.
Las órbitas de los dos cuerpos celestes se representan mediante el código
m2=1; %masas m1=2*m2; e=0.65; %excentricidad %trayectorias en el sistema CM th=1:360; radio=1./(1+e*cos(th*pi/180)); x1=radio.*cos(th*pi/180)*m2/(m1+m2); y1=radio.*sin(th*pi/180)*m2/(m1+m2); x2=-radio.*cos(th*pi/180)*m1/(m1+m2); y2=-radio.*sin(th*pi/180)*m1/(m1+m2); hold on plot(x1,y1) plot(x2,y2) plot(0,0,'o','markersize',6, 'markeredgecolor','r','markerfacecolor','r') hold off axis equal axis off
Tomando el centro de masa como origen se cumple que
El centro de masa está en reposo
Expresamos la velocidad en coordenadas polares
Se cumple que
Por ser un sistema aislado, el momento angular total permanece constante
y la energía permanece constante
De las ecuaciones
La velocidad angular de traslación de la dos partículas es la misma, dθ/dt
Despejamos la velocidad angular de traslación, dθ/dt del momento angular
Energía potencial efectiva
Expresamos la energía potencial efectiva en función de tres variables: posición de la segunda partícula r2, velocidades angulares de rotación ω1 y ω2
Demostraremos que el mínimo de de la energía potencial efectiva Ve corresponde a la situación
Es conveniente expresar la energía potencial efectiva en términos de magnitudes adimensionales
Teniendo en cuenta que
Lo mismo con I2 y ω2
Después de simplificar y agrupar términos, el resultado final es
Mínimo de la energía potencial efectiva
El extremo de la función Ve(R2, Ω1, Ω1) se calcula
Derivamos respecto de Ω1
-
Derivamos respecto de Ω2
Derivamos respecto de R2
Resolvemos el sistema de dos ecuaciones
Hemos demostrado que en el mínimo se cumple que Ω1=Ω2 y por tanto, ω1=ω2. Las velocidades angulares de rotación del planeta y del satélite alrededor de sus ejes respectivos son iguales
Nos falta demostrar que la velocidad angular del centro del satélite cuando se mueve alrededor del planeta, dθ/dt=ω1. Partimos de la expresión
Expresada en términos de unidades adimensionales
En el mínimo
El resultado es
Esta ecuación tiene dos raíces reales y otras dos complejas congugadas si
de otro modo, las cuatro raíces son complejas y el potencial efectivo no tiene mínimo local. Esta condición es equivalente a
El satélite es una partícula
El segundo objeto celeste es una masa puntual, de modo que el momento de inercia I2=0, y la velocidad angular de rotación ω2 no existe. Llamamos I=I1, ω=ω1 M=m1 y m=m2
El momento angular y la energía potencial efectiva para este sistema son
Expresamos la energía potencial efectiva en función de dos variables ω y r2
Es conveniente expresar la energía potencial efectiva en términos de magnitudes adimensionales
Mínimo de la energía potencial efectiva
El extremo de la función Ve(R2, Ω) se calcula
Derivamos respecto de Ω
Derivamos respecto de R2
Orbitas circulares con M>>m
Cuando la masa del planeta M es mucho mayor que la del satélite m, el centro del planeta es el c.m. del sistema y se convierte en un centro fijo de fuerzas, r2=r es la distancia del planeta al satélite
De la dinámica del movimiento circular uniforme
El momento angular es
Cuando lo expresamos en términos de magnitudes adimensionales, tenemos en cuenta que si m<<M entonces m+M≈M, obtenemos la velocidad angular de rotación Ω del planeta
En el apartado anterior, obtuvimos otra expresión para Ω
Expresión que obtendremos más abajo, cuando la derivada de Ve respecto de R se hace cero (extremo de la función).
Comprobamos que la velocidad angular dθ/dt del satélite (masa puntual) alrededor del planeta, es igual a la velocidad angular de rotación del planeta ω alrededor de su eje
Sustituimos Ω en la energía potencial efectiva, teniendo en cuenta m<<M
Representamos la energía potencial efectiva para tres valores de k=0.05, 27/256 y 2.
hold on
k=0.05;
f=@(x) (1-sqrt(x)).^2/k-1./x;
fplot(f,[0,1.5])
line([0.8831,0.8831],[-2,f(0.8831)],'lineStyle','--')
line([0.2021,0.2021],[-2,f(0.2021)],'lineStyle','--')
k=27/256;
f=@(x) (1-sqrt(x)).^2/k-1./x;
fplot(f,[0,1.5])
line([0.5625,0.5625],[-2,f(0.5625)])
k=2;
f=@(x) (1-sqrt(x)).^2/k-1./x;
fplot(f,[0,1.5])
hold off
grid on
ylim([-2,2])
xlabel('R')
ylabel('V_e')
title('Energía potencial efectiva')
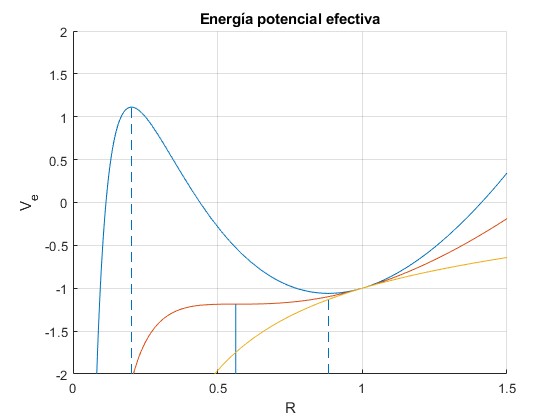
Para R=1, Ve es independiente de k y es proporcional a -1. Por esa razón, todas las curvas pasan por el punto (1,-1)
Para k<27/256, la función tiene un máximo y mínimo local. Para k>27/256 el máximo y mínimo desaparecen, no existe equilibrio. La línea de separación entre estas dos situaciones corresponde a k=27/256.
>> k=0.05; >> roots([1,-1,2*k,0,k^2]) ans = 0.8831 + 0.0000i 0.2021 + 0.0000i -0.0426 + 0.1104i -0.0426 - 0.1104i >> k=27/256; >> roots([1,-1,2*k,0,k^2]) ans = 0.5625 + 0.0000i 0.5625 - 0.0000i -0.0625 + 0.1768i -0.0625 - 0.1768i >> k=2; >> roots([1,-1,2*k,0,k^2]) ans = 0.7319 + 1.7371i 0.7319 - 1.7371i -0.2319 + 1.0354i -0.2319 - 1.0354i
Para k=0.05, hay dos raíces reales, el máximo de Ve se produce para R=0.2021 y el mínimo para R=0.8831. Para k=27/256, se obtiene un punto de inflexión R=0.5625, que es una raíz doble, y para k>27/256, las cuatro raíces son complejas
Los extremos se producen
Se reduce a una ecuación de tercer grado
La ecuación cúbica tiene tres raíces reales si
En caso contrario, la ecuación cúbica tiene una raíz real y dos complejas conjugadas
Utilizamos Math Symbolic de MATLAB para calcular la diferencia R2-Q3
>> syms k; >> a=-k; >> b=-k^2; >> c=k^3-k^2/8; >> Q=(a^2-3*b)/9; >> R=(2*a^3-9*a*b+27*c)/54; >> z=R^2-Q^3; >> simplify(z) ans =-(k^4*(256*k - 27))/6912
El resultado es
Se cumple la desigualdad R2-Q3<0 si 256k-27>0, es decir, si . Por ejemplo, k=2, las raíces del polinomio de cuarto grado son todas complejas, si k=0.05<27/256 dos raíces son reales
Finalmente, comprobamos que las dos fórmulas de Ω producen los mismos resultados en el máximo y en el mínimo
>> k=0.05; >> R=0.8831; >> (1-sqrt(R))/k ans = 1.2053 >> 1/(k+R^2) ans = 1.2050 >> R=0.2021; >> (1-sqrt(R))/k ans = 11.0089 >> 1/(k+R^2) ans = 11.0078
El caso de Fobos
Fobos es un satélite muy pequeño que gira alrededor de Marte. Los datos del sistema de dos cuerpos celestes son
- masa de Marte, M=6.39·1023 kg
- momento de inercia de Marte, I=2.96·1036kgm2
- velocidad angular de rotación de Marte en torno a su eje, ω=7.09·10-5 rad/s
- masa de Fobos, m=1.08·1016 kg
- radio de la órbita circular de Fobos, r=9.37·106 m
Velocidad angular dθ/dt de Fobos alrededor de Marte
Momento angular L constante
El radio R (adimensional) inicial de Fobos es
Parámetro k
Resolvemos la ecuación de cuarto grado
M=6.39e23; %masa de Marte I=2.96e36; %momento de inercia de Marte w=7.09e-5; %velocidad angular de rotación de Marte m=1.08e16; %masa de Fobos r=9.37e6; %radio de la órbita de Fobos G=6.67e-11; %constante de la gravitación universal %velocidad angular de traslación de Fobos w_f=sqrt(G*M/r^3); L=m*r^2*w_f^2+I*w; %momento angular R=G*M*m^2*r/L^2; %radio inicial de Fobos k=G^2*M^2*m^3*I/L^4; %parámetro k raices=roots([1,-1,2*k,0,k^2]);
R = 1.0576e-12 >> format long >> raices raices = 1.000000000000000 + 0.000000000000000i -0.000000000001151 + 0.000000000001993i -0.000000000001151 - 0.000000000001993i 0.000000000002302 + 0.000000000000000i
El radio adimensional inicial de Fobos es R=1.0576·10-12
Al resolver la ecuación de cuarto grado, obtenemos dos raices reales R=1 y R=2.302·10-12
El radio inicial R=1.0576·10-12 de Fobos es menor que el radio del máximo 2.302·10-12, al disminuir la energía del sistema Marte-Fobos debida a las fuerzas de marea, el destino final de Fobos será la superficie de Marte
Representamos la energía potencial efectiva Ve en el intervalo R=(0.5·10-12, 3.5·10-12). Observamos el máximo y a la izquierda la posición inicial de Fobos.
Añadimos al script anterior las siguientes líneas de código
...
hold on
f=@(x) (1-sqrt(x)).^2/k-1./x;
fplot(f,[0.5e-12,3.5e-12])
line([2.302e-12,2.302e-12],[f(0.5e-12),f(2.302e-12)])
line([R,R],[f(0.5e-12),f(R)])
plot(R,f(R),'ro','markersize',3,'markerfacecolor','r')
hold off
grid on
xlabel('R')
ylabel('V_e')
title('Energía potencial efectiva')
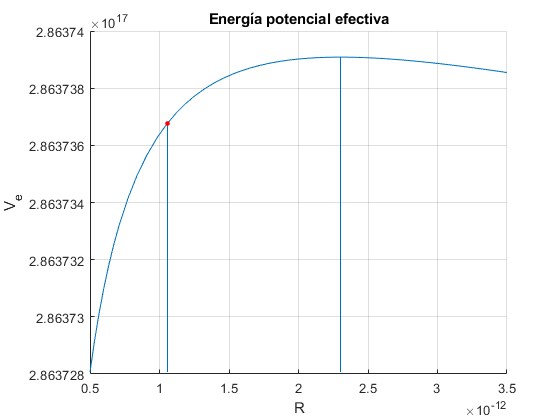
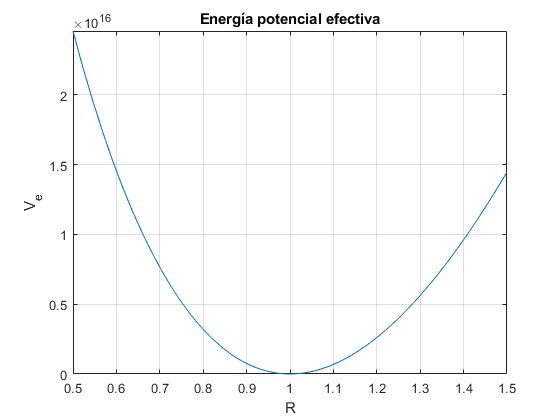
Representamos la energía potencial efectiva Ve alrededor de su mínimo R=1 que es inalcanzable por Fobos
M=6.39e23; %masa de Marte
I=2.96e36; %momento de inercia de Marte
w=7.09e-5; %velocidad angular de rotación de Marte
m=1.08e16; %masa de Fobos
r=9.37e6; %radio de la órbita de Fobos
G=6.67e-11; %constante de la gravitación universal
%velocidad angular de traslación de Fobos
w_f=sqrt(G*M/r^3);
L=m*r^2*w_f^2+I*w; %momento angular
k=G^2*M^2*m^3*I/L^4; %parámetro k
f=@(x) (1-sqrt(x)).^2/k-1./x;
fplot(f,[0.5,1.5])
grid on
xlabel('R')
ylabel('V_e')
title('Energía potencial efectiva')
Referencias
Andrea Ferroglia, Miguel C. N. Fiolhais. Tidal locking and the gravitational fold catastrophe. Am. J. Phys. 88 (12), December 2020. pp. 1059-1067