

Alcance máximo en el plano horizontal
El salto de tarzán
Se dispara un proyectil desde una altura h sobre un plano horizontal con velocidad inicial v0, haciendo un ángulo θ con la horizontal. Para describir el movimiento establecemos un sistema de referencia como se indica en la figura.
Las componentes de la velocidad del proyectil en función del tiempo son:
vx=v0·cosθ
vy=v0·sinθ-g·t
La posición del proyectil en función del tiempo es
x= v0·cosθ·t
y= h+v0·sinθ·t-g·t2/2
Estas son las ecuaciones paramétricas de la trayectoria, ya que dado el tiempo t, se obtiene la posición x e y del proyectil.
El tiempo de vuelo T se obtiene poniendo y=0 en la segunda ecuación y despejando el tiempo t.
El proyectil llega al punto de impacto en el instante t=T. Sustituyendo t en la primera ecuación obtenemos el alcance, o distancia horizontal entre el origen y el punto de impacto, R.
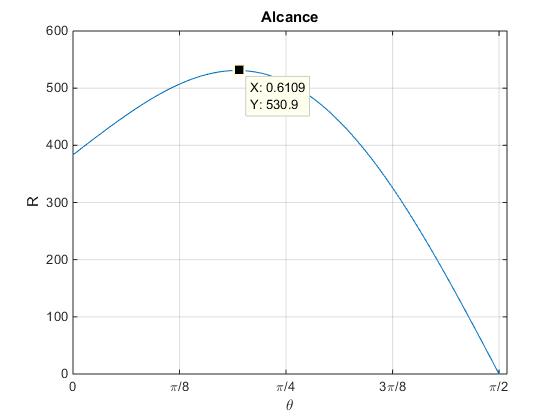
En la figura, se representa el alcance R en función del ángulo de tiro θ. Se ha señalado el ángulo 0.6109 rad=35° para el cual el alcance es máximo.
v0=60;
h=200;
x=(0:90)*pi/180;
R=v0^2*(sin(x)+sqrt(sin(x).^2+2*9.8*h/v0^2)).*cos(x)/9.8;
plot(x,R)
set(gca,'XTick',0:pi/8:pi/2)
set(gca,'XTickLabel',{'0','\pi/8','\pi/4','3\pi/8','\pi/2'})
grid on
xlabel('\theta')
ylabel('R')
title('Alcance')
La componente vy de la velocidad cuando el cuerpo llega al suelo es
La velocidad final vf del proyectil cuando llega al suelo y el ángulo que forma con la horizontal (véase la primera figura) es
El módulo de la velocidad final vf se puede calcular también, aplicando el principio de conservación de la energía.
Alcance máximo
Derivando R con respecto del ángulo de tiro θ e igualando a cero obtenemos el ángulo de tiro θm para el cual el alcance es máximo.
Elevamos al cuadrado y simplificamos
El ángulo θm para el cual el alcance R es máximo vale
Sustituyendo cosθ y sinθ en función del parámetro z, en la expresión del alcance R, se obtiene después de algunas operaciones
Otra forma de expresar el alcance máximo Rm es
Llegamos a una expresión simple para el alcance máximo
Rm=h·tan(2θm)
El tiempo de vuelo Tm para el ángulo θm
El alcance máximo sin cálculo de derivadas
Una forma alternativa de calcular el ángulo θm, sin tener que realizar un cálculo de derivadas es el siguiente:
Eliminamos el tiempo t, en de las ecuaciones paramétricas de la trayectoria, llegamos a la ecuación de la parábola (recuérdese que 1/cos2θ=1+tan2θ)
En el punto de impacto con el suelo y=0, obtenemos la ecuación de segundo grado en tanθ
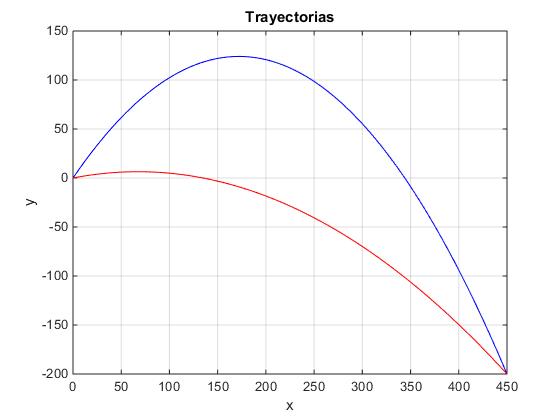
con dos soluciones para R<Rm, y una solución para R=Rm y ninguna para R>Rm,véase la figura.
v0=60;
h=200;
R=450;
%ángulos de tiro
a=9.8*R^2/(2*v0^2);
b=-R;
c=9.8*R^2/(2*v0^2)-h;
tan_1=(-b+sqrt(b^2-4*a*c))/(2*a);
tan_2=(-b-sqrt(b^2-4*a*c))/(2*a);
%trayectorias
x=linspace(0,R,100);
y1=x*tan_1-9.8*x.^2*(1+tan_1^2)/(2*v0^2);
y2=x*tan_2-9.8*x.^2*(1+tan_2^2)/(2*v0^2);
plot(x,y1,'b',x,y2,'r')
grid on
xlabel('x')
ylabel('y')
title('Trayectorias')
Esto implica que el discriminante de la ecuación de segundo grado debe ser cero para el ángulo θm que hace que el alcance sea máximo
El mismo resultado que ya obtuvimos de una forma más laboriosa.
Velocidad final y velocidad inicial
La velocidad final y el ángulo que forma con el eje X son
La relación entre el ángulo de disparo θm y el ángulo φm que forma el vector velocidad cuando el proyectil llega al suelo es
El vector velocidad inicial y el vector velocidad final son perpendiculares,
Ejemplo:
- La velocidad de disparo, v0=60 m/s,
- La altura inicial del proyectil, h=200 m
- El ángulo de tiro, θ=30º.
El alcance R es
-
El alcance máximo (véase la última figura) se obtiene para el ángulo
-
Ángulos de tiro que producen el mismo alcance R=450 m.
El tiempo T de vuelo del proyectil es
El alcance y el tiempo de vuelo para este ángulo son, respectivamente
Calculamos los dos ángulos de tiro que producen el mismo alcance R<Rm, por ejemplo un alcance de R=450 m. Calculamos las raíces de la ecuación de segundo grado en tanθ. Véase la figura, más arriba
θ1=10.8º, θ2=55.3º, Como vemos θ1<θm<θ2
Supongamos que un atleta lanza un peso desde una altura h con una velocidad v0, haciendo un ángulo θ con la horizontal.
Si el atleta lanza el peso desde una altura de h=2.1 m y quiere que llegue a una distancia Rm=22 m, el ángulo óptimo de lanzamiento θm vale
Rm=h·tan(2θm) θm=42.3º
El análisis del lanzamiento del peso es más complicado, ya que la altura h no es independiente del ángulo θ, tal como se aprecia en la figura, sino que h=H+b·sinθ, siendo H la altura del hombro y b la longitud del brazo. (Véase De Luca 2005)
El salto de tarzán
Consideremos un objeto que denominaremos proyectil de masa m que cuelga de una cuerda de longitud l. Cuando se separa de su posición de equilibrio y se suelta comienza a oscilar, tal como estudiaremos en la página dedicada al péndulo simple.
Soltamos el proyectil cuando la cuerda se desvía de la posición de equilibrio un ángulo θ0. Se corta la cuerda cuando el péndulo se desvía de la posición vertical un ángulo θ<|θ0|. El proyectil describe una trayectoria parabólica si se desprecia el rozamiento con el aire, tal como se aprecia en la figura.
Principio de conservación de la energía
El proyectil parte de la posición inicial θ0, con velocidad inicial v=0. Describe un arco de circunferencia y llega a la posición final θ, con velocidad v. Aplicamos el principio de conservación de la energía para calcular la velocidad v. Si ponemos el nivel cero de energía potencial en la parte más baja de la trayectoria
Ecuaciones del tiro parabólico
Para describir el movimiento del proyectil, situamos los ejes X e Y del modo en el que se señala en la figura; el eje X en el suelo, y el eje Y tiene la dirección del péndulo en la posición de equilibrio θ=0.
El proyectil se dispara con una velocidad v, haciendo un ángulo θ con la horizontal, desde una altura h=H+(l-lcosθ). Siendo H+l la altura del centro de giro del péndulo.
La posición del proyectil en función del tiempo es
x= l·sinθ+v·cosθ·t
y= h+v·sinθ·t-g·t2/2
Siguiendo los mismos pasos que en la sección anterior. Obtenemos el alcance R, poniendo y=0, en la segunda ecuación, despejando el tiempo de vuelo t, y sustituyéndolo en la primera ecuación de la trayectoria.
Expresamos el alcance R en función del ángulo θ
Dado el ángulo θ0 de partida del objeto, se tratará de calcular el ángulo θ, para el cual el alcance R es máximo.
Alcance máximo
Dado el ángulo θ0 de partida del objeto, calcularemos el ángulo θm, para el cual el alcance R es máximo.
l=0.6;
H=1.0;
aIni=80*pi/180;
x=linspace(0,aIni,100);
R=2*l*((cos(x)-cos(aIni)).*cos(x)).*(sin(x)+sqrt(sin(x).^2+
(H+l*(1-cos(x)))./(l*(cos(x)-cos(aIni)))))+l*sin(x);
plot(x,R)
set(gca,'XTick',0:pi/8:pi/2)
set(gca,'XTickLabel',{'0','\pi/8','\pi/4','3\pi/8','\pi/2'})
grid on
ylim([0 2])
xlabel('\theta')
ylabel('R')
title('Alcance')
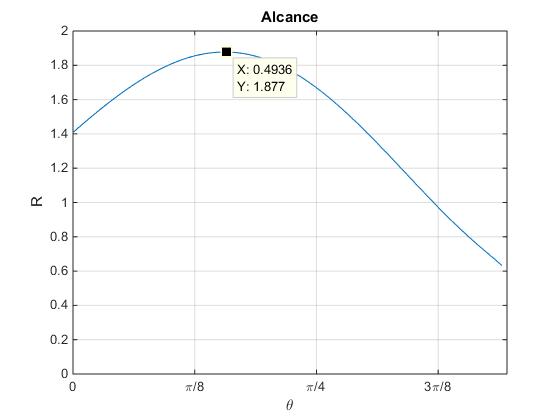
En la figura, se representa el alcance R en función del ángulo θ, para θ0=80º. se ha señalado el ángulo para el cual se produce el alcance máximo, 0.4936 rad=28.3°.
El ángulo θm para el cual R es máximo se obtiene derivando R respecto del ángulo θ, e igualando a cero. Es decir, resolviendo la ecuación dR/dθ=0.
En el segundo artículo citado en las referencias, el alcance máximo se obtiene calculando las raíces reales de la ecuación cúbica.
con x=cosθm
Ejemplo:
- Longitud del péndulo, l=0.6 m
- Altura del proyectil en la situación de equilibrio, H=1.0 m
- Se desvía el péndulo θ0=80º de la posición de equilibrio
- Se corta la cuerda cuando el péndulo se desvía θ=30º
La velocidad del proyectil cuando se corta la cuerda es
Ecuaciones del movimiento
x= 0.6·sin30+2.85·cos30·t
y= 1.0+0.6-0.6·cos30+2.85·sin30·t-9.8·t2/2
El alcance se calcula poniendo y=0. Resolvemos la ecuación de segundo grado en t. La raíz positiva vale t=0.64 s
Calculamos el alcance en la primera ecuación x=1.87 m
Calculamos el alcance de forma directa
Para calcular el ángulo θm para el cual el alcance es máximo, se resuelve la ecuación cúbica
x3+a·x2+bx+c=0
con a=2.32, b=0, c=-2.49
Se calcula
Como R2>Q3 entonces la ecuación tiene una raíz real
El ángulo x1=cosθm, θm=28.1º
Este ángulo θm se puede obtener aproximadamente de forma gráfica, tal como se ha señalado en la figura
H=1.0;
l=0.6;
aIni=80*pi/180;
a=(H+l*(1-2*cos(aIni)))/l;
c=-(H+l*(1-cos(aIni)))/l;
x=roots([1 a 0 c]);
for i=1:length(x)
if isreal(x(i))
disp(acos(x(i))*180/pi);
break;
end
end
28.0663
Actividades
Se introduce
-
El ángulo θ0 que se desvía el péndulo de la posición de equilibrio, en el control titulado Angulo inicial.
-
El ángulo θ que forma el péndulo con la vertical cuando se corta la cuerda que sostiene el proyectil, en el control titulado Angulo final.
-
La longitud del péndulo se ha fijado en l=0.6 m
-
La altura del proyectil en la posición de equilibrio θ=0 se ha fijado en H=1.0 m
Se pulsa el botón titulado Nuevo.
Referencias
Buckmaster H. A., Ideal ballistic trajectories revisited. Am. J. Phys. 53 (7) July 1985, pp. 638-641.
Bittel D. Maximizing the range of a projectile launched by a simple pendulum. The Physics Teacher, 43, February 2005, pp. 98-100.
De Luca R. Shot-put kinematics. Eur. J. Phys. 26 (2005), pp. 1031-1036