

Una partícula puede deslizar a lo largo de una varilla que gira
Una varilla, que forma un ángulo θ con la horizontal está girando alrededor de su eje vertical Z con velocidad angular constante ω.
Un cuerpo de masa m situado a una distancia x puede deslizar a lo largo de la varilla
El coeficiente estático de rozamiento entre el cuerpo y la varilla es μ. Vamos a estudiar en esta página, el movimiento del cuerpo para distintas posiciones x y velocidades angulares ω de rotación.
Velocidad angular nula ω=0
Primero, vamos a calcular los ángulos θ para los cuales la partícula permanece en reposo si la varilla no gira ω=0
Las fuerzas sobre la partícula son
- el peso, mg
- La fuerza que ejerce la varilla, N
- La fuerza de rozamiento, Fr
Equilibrio en la dirección perpendicular a la varilla
Equilibrio en la dirección de la varilla
Permanece en reposo si, Fr es menor que su valor máximo μN
Rozamiento nulo
Los casos más interesantes se presentan cuando la varilla gira, ω≠0
Consideremos primero el caso más sencillo, cuando no hay rozamiento entre el cuerpo y la superficie sobre la que desliza.
Sistema de referencia inercial
Sobre el cuerpo actúan las siguientes fuerzas:
- El peso, mg
- La fuerza que ejerce la varilla, N.
El cuerpo describe una trayectoria circular centrada en el eje Z de radio x·cosθ. La aceleración normal an=ω2x·cosθ tiene dirección radial y sentido hacia el centro de la circunferencia.
Descomponemos la reacción N y aplicamos:
Equilibrio en la dirección vertical, perpendicular al plano de la trayectoria circular
Ncosθ=mg
La ecuación de la dinámica del movimiento circular uniforme en la dirección radial
Nsinθ=mω2x·cosθ
Eliminando N en el sistema de dos ecuaciones, la posición de equilibrio es
Sistema de referencia no inercial
Este observador verá el cuerpo en equilibrio, bajo la acción de las siguientes fuerzas:
- El peso, mg
- La fuerza que ejerce la varilla, N.
- La fuerza centrífuga, Fc= mω2x·cosθ
Descomponemos la reacción N, y aplicamos las condiciones de equilibrio
Ncosθ=mg
Nsinθ=mω2 x·cosθ
Obtenemos las mismas ecuaciones que en el apartado anterior
Estabilidad
El peso es una fuerza conservativa. Situamos el nivel cero de energía potencial en el origen O. La energía potencial es
Eg= mgx·sinθ
La fuerza centrífuga depende solamente de la distancia r al eje de rotación, es una fuerza conservativa similar a la que ejerce de un muelle elástico.
La fuerza que ejerce un muelle elástico tiene sentido contrario al desplazamiento F=-kx, su energía potencial es positiva Ep=kx2/2
La fuerza centrífuga tiene el mismo sentido que el desplazamiento F=mω2·r
y su energía potencial será por tanto negativa. La energía potencial inicial para r=0, se toma como cero.
Cuando el cuerpo se encuentra en la posición x a lo largo de la varilla, la energía potencial total será la suma de ambas contribuciones Ep=Eg+Ec.
La condición de equilibrio xe se establece cuando Ep sea un extremo (máximo o mínimo)
La estabilidad de la solución depende de la derivada segunda.
La energía potencial presenta un máximo para xe, la derivada segunda es negativa y el equilibrio es inestable.
- Si se coloca el cuerpo en la posición x>xe desliza hacia arriba
- Si se coloca el cuerpo en la posición x<xe desliza hacia abajo.
Rozamiento no nulo
Describiremos el movimiento del cuerpo desde el punto de vista del observador no inercial
Supongamos que el cuerpo se coloca en una posición x>xe, el cuerpo tenderá a deslizar hacia arriba, la fuerza de rozamiento se opondrá a este deslizamiento. Las fuerzas sobre el cuerpo serán:
- El peso, mg
- La fuerza que ejerce la varilla, N.
- La fuerza centrífuga, Fc= mω2x·cosθ
- La fuerza de rozamiento, Fr.
Supongamos que el cuerpo se coloca en una posición x<xe, el cuerpo tenderá a deslizar hacia abajo hacia el origen, la fuerza de rozamiento se opondrá a este deslizamiento. Las fuerzas sobre el cuerpo serán.
- El peso mg
- La fuerza que ejerce la varilla, N.
- La fuerza centrífuga, Fc= mω2x·cosθ
- La fuerza de rozamiento, Fr.
Descomponemos las fuerzas a lo largo de la varilla y perpendicularmente a ésta.
Si el cuerpo se encuentra en equilibrio entonces,
Fc·cosθ=mg·sinθ+Fr
N=mg·cosθ+Fc·sinθ
Cuando la fuerza de rozamiento alcance su valor máximo Fr=μN el cuerpo empezará a deslizar hacia arriba a lo largo de la varilla.
Hemos utilizado la relación trigonométrica
Cuando la posición inicial del cuerpo x0≥x1 el cuerpo desliza hacia arriba, calculamos su aceleración
La solución de esta ecuación diferencial es
Los coeficientes A y B se determinan a partir de las condiciones iniciales: en el instante t=0, la posición inicial x=x0 y la velocidad inicial dx/dt=0, parte del reposo.
Descomponemos las fuerzas a lo largo del plano y perpendicularmente al plano
Si el cuerpo se encuentra en equilibrio entonces,
mg·sinθ=Fc·cosθ +Fr
N=mg·cosθ+Fc·sinθ
Cuando la fuerza de rozamiento alcance su valor máximo Fr=μN el cuerpo empezará a deslizar hacia abajo a lo largo de la varilla.
Cuando la posición inicial del cuerpo x0≤x2 el cuerpo desliza hacia abajo, calculamos su aceleración.
La solución de esta ecuación diferencial es
Los coeficientes A y B se determinan a partir de las condiciones iniciales: en el instante t=0, la posición inicial x=x0 y la velocidad inicial dx/dt=0, parte del reposo.
Posiciones en reposo
Si, sinθ>μcosθ, tanθ>μ o bien, si θ>β el cuerpo permanecerá en equilibrio en el intervalo x2<x<x1
Si, sinθ<μcosθ, tanθ<μ, o bien, si θ<β, entonces x2<0 lo que no tiene sentido físico. El cuerpo permanecerá en equilibrio en el intervalo 0<x<x1. Recuérdese que tanβ=μ
Ejemplo:
- El coeficiente de rozamiento, μ=0.2.
- La velocidad angular de rotación, ω=7 rad/s
- El ángulo que forma la varilla con la horizontal, θ=30º
Cuando no hay rozamiento la posición de equilibrio inestable es
Cuando hay rozamiento, tan(30°)>0.2
- Cuando la posición inicial del cuerpo es x0≤x2 desliza hacia abajo
- Cuando la posición inicial del cuerpo es x0≥x1 desliza hacia arriba.
La partícula estará en equilibrio entre las posiciones x2 y x1
Conclusiones
El valor máximo de la fuerza de rozamiento es
La partícula permencerá en reposo si
Siempre que F<Fm la partícula permenecerá en reposo
Representamos F y Fm (fuerzas por unidad de masa) para
tanθ>μ, θ>β
- Coeficiente estático de rozamiento, μ=0.2
- Velocidad angular de rotación, ω= 7 rad/s
- Inclinación de la varilla respecto de la horizontal, θ=30°
tanθ<μ, θ<β
mu=0.2; %coeficiente estático
w=7; %velocidad angular de rotación
th=pi/6; %inclinación de la varilla
hold on
Fr=@(x) mu*(9.8+w^2*x*sin(th))*cos(th);
F=@(x) abs(9.8*sin(th)-w^2*x*cos(th)^2);
fplot(Fr, [0,0.4])
fplot(F, [0,0.4])
xe=9.8*sin(th)/(w*cos(th))^2;
plot(xe,0,'ro','markersize',4,'markerfacecolor','r')
x1=9.8*tan(th+atan(mu))/(w^2*cos(th));
x2=9.8*tan(th-atan(mu))/(w^2*cos(th));
plot(xe,0,'ro','markersize',3,'markerfacecolor','r')
plot(x1,F(x1),'bo','markersize',4,'markerfacecolor','b')
plot(x2,F(x2),'bo','markersize',4,'markerfacecolor','b')
line([x1,x1],[0,F(x1)],'lineStyle','--')
line([x2,x2],[0,F(x2)],'lineStyle','--')
hold off
grid on
xlabel('x')
ylabel('F, F_m')
legend('F_m','F','location','best')
title('Movimento circular')
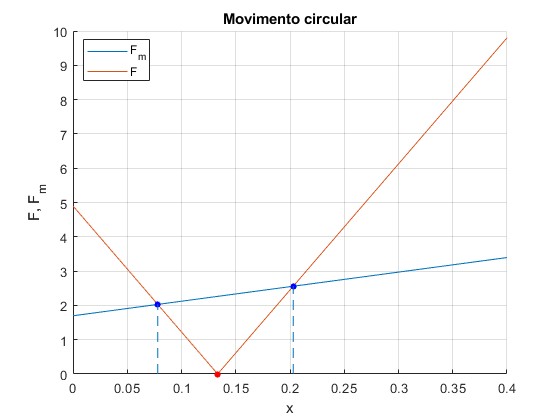
La posición de equilibrio inestable xe=13.3 cm (un punto de color rojo). El cuerpo permanecerá en reposo en el intervalo [7.8, 20.3] cm. Como vemos en la gráfica, en este intervalo, F (color rojo) es menor que el valor máximo de la fuerza de rozamiento Fm=μN (en azul)
xe = 0.1333 x1 = 0.2030 x2 = 0.0781
Cambiamos el coeficiente estático de rozamiento, μ=0.7
mu=0.7; %coeficiente estático
w=7; %velocidad angular de rotación
th=pi/6; %inclinación de la varilla
hold on
Fr=@(x) mu*(9.8+w^2*x*sin(th))*cos(th);
F=@(x) abs(9.8*sin(th)-w^2*x*cos(th)^2);
fplot(Fr, [-0.1,0.6])
fplot(F, [-0.1,0.6])
xe=9.8*sin(th)/(w*cos(th))^2;
plot(xe,0,'ro','markersize',4,'markerfacecolor','r')
x1=9.8*tan(th+atan(mu))/(w^2*cos(th));
x2=9.8*tan(th-atan(mu))/(w^2*cos(th));
plot(xe,0,'ro','markersize',3,'markerfacecolor','r')
plot(x1,F(x1),'bo','markersize',4,'markerfacecolor','b')
plot(x2,F(x2),'bo','markersize',4,'markerfacecolor','b')
line([x1,x1],[0,F(x1)],'lineStyle','--')
line([x2,x2],[0,F(x2)],'lineStyle','--')
hold off
grid on
xlabel('x')
ylabel('F, F_m')
legend('F_m','F','location','best')
title('Movimento circular')
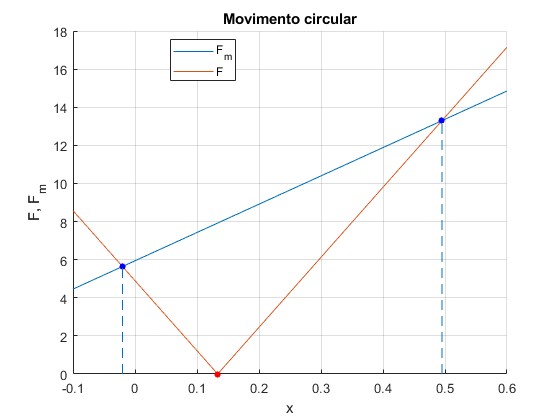
El cuerpo permanecerá en reposo en el intervalo [0, 49.5] cm. Como vemos en la gráfica, en este intervalo, F (color rojo) es menor que el valor máximo de la fuerza de rozamiento Fm=μN (en azul)
x1 = 0.4951 x2 = -0.0202
Actividades
Se introduce
- La posición inicial x0, en el control titulado Posición.
- La velocidad angular de rotación ω, en el control titulado V. angular.
- El coeficiente de rozamiento μ, en el control titulado Coef. rozamiento.
- El ángulo que forma la superficie cónica con la horizontal se ha fijado en θ=30º
- Se pulsa el botón titulado Nuevo
Observamos el movimiento de cuerpo deslizando a lo largo de la varilla, tal como lo vería un observador no inercial que girase con ella. Se marca la posición angular de equilibrio inestable xe.
En la parte derecha, se representa la curva de energía potencial Ep(x) en color azul, que como vemos presenta un máximo en la posición de equilibrio inestable.
Refreencias
IPhO, Problems and Solutions. Rotating Rod, East Germany, 1975