

El electroscopio
El electroscopio consta de dos láminas delgadas de oro o aluminio A que están fijas en el extremo de una varilla metálica B que pasa a través de un soporte C de ebonita, ámbar o azufre. Cuando se toca la bola del electroscopio con un cuerpo cargado, las hojas adquieren carga del mismo signo y se repelen siendo su divergencia una medida de la cantidad de carga que han recibido. La fuerza de repulsión electrostática se equilibra con el peso de las hojas.
Si se aplica una diferencia de potencial entre la bola C y la caja del mismo, las hojas también se separan. Se puede calibrar el electroscopio trazando la curva que nos da la diferencia de potencial en función del ángulo de divergencia.
Un modelo simplificado de electroscopio consiste en dos pequeñas esferas de masa m cargadas con cargas iguales q y del mismo signo que cuelgan de dos hilos de longitud l, tal como se indica la figura. A partir de la medida del ángulo θ que forma una bolita con la vertical, se calcula su carga q.
Sobre una bolita actúan tres fuerzas
- El peso, mg
- La tensión de la cuerda, T
- La fuerza de repulsión eléctrica entre las bolitas, F
En el equilibrio
Tsinθ =F
Tcosθ =mg
Conocido el ángulo θ se determina la carga q
Conocida la carga q se determina el ángulo θ
Dividiendo la primera ecuación entre la segunda, eliminamos la tensión T y obtenemos
F=mg·tanθ
Midiendo el ángulo θ obtenemos la fuerza de repulsión F entre las dos esferas cargadas
Calculamos el valor de la carga q, si se conoce la longitud l del hilo que sostiene las esferas cargadas.
Ejemplo:
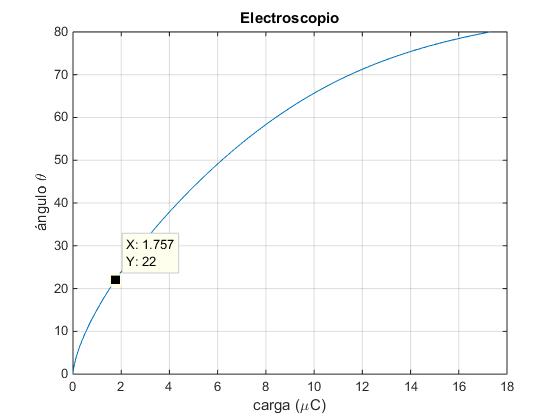
Sea la masa m=50 g=0.05 kg, la longitud del hilo l=50 cm=0.5 m. Se ha medido el ángulo que hace los hilos con la vertical θ=22º, determinar la carga q de las bolitas.
La separación entre las cargas es x=2·0.5·sin(22º)=0.375 m
La fuerza F de repulsión entre las cargas vale
De las ecuaciones de equilibrio
Tsin22º=F
Tcos22º=0.05·9.8
eliminamos T y despejamos la carga q, se obtiene 1.76·10-6 C ó 1.76 μC.
Eliminado T en las ecuaciones de equilibrio, obtenemos la ecuación
La carga q está en μC y la masa m de la bolita en g.
Expresando el coseno en función del seno, llegamos a la siguiente ecuación cúbica
El script de MATLAB, calcula la raíz real de la ecuación cúbica
longitud=0.5; %longitud del péndulo en metros m=50; %gramos k=9.0/(4*longitud*longitud*m*9.8); q=1.76; %micro coulombios %raíz real de la ecuación cúbica x^3+a*x^2+b*x+c=0 a=0; b=q^4*k^2; c=-b; Q=(a^2-3*b)/9; R=(2*a^3-9*a*b+27*c)/54; A=-sign(R)*nthroot(abs(R)+sqrt(R^2-Q^3),3); B=Q/A; x=(A+B)-a/3; %ángulo en grados angulo=asin(sqrt(x))*180/pi
angulo = 22.0255
En la figura, se muestra el comportamiento de un electroscopio, para cada carga q en μC tenemos un ángulo de desviación θ en grados, del hilo respecto de la vertical. Si se mide el ángulo θ en el eje vertical obtenemos la carga q en el eje horizontal.
Representamos la función
Cambiamos los ejes de modo que en el eje horizontal ponemos la carga q y en el eje vertical su correspondiente ángulo θ de desviación en grados
longitud=0.5; %longitud del péndulo en metros
m=50; %gramos
k=9.0/(4*longitud*longitud*m*9.8);
ang=0:pi/360:4*pi/9; %ángulos
x=sqrt(sin(ang).^3./(k*cos(ang))); %cargas
plot(x,ang*180/pi)
grid on
xlabel('carga (\muC)')
ylabel('ángulo \theta')
title('Electroscopio')
Pérdidas de carga
Dos bolitas de masa m cuelgan de hilos inextensibles y de masa despreciable de longitud l. Están inicialmente cargadas con una carga positiva q0. El ángulo inicial de equilibrio es θ0, o la separación inicial r0=2dsinθ0.
La carga de cada bolita disminuye con el tiempo de la forma, , donde b es una constante dada. Como consecuencia, las bolas se van aproximando. Vamos a determinar el ángulo θ o la separación r en función del tiempo.
Dibujamos las fuerzas sobre cada bolita y sus componentes en la dirección tangencial
La ecuación del movimiento en la dirección tangencial es
Ejemplo
- Carga, q0=7 μC
- Longitud del péndulo, l=50 cm
- Masa, m=50 g
- Coeficiente de pérdida de carga, b=0.1 s-1
Conocida la carga q0 se determina el ángulo θ0 de equilibrio
La bolita pierde su carga en el instante t=1/b
Se resuelve la ecuación diferencial por procedimientos numéricos en el intervalo de tiempo (0, 1/b), con las siguientes condiciones iniciales: en el instante t=0, la bolita parte en reposo de la posición angular θ=θ0
q0=7; %carga inicial micro_C
m=50; %masa en gramos
longitud=0.5; %longitud en m
k=9.0/(4*longitud*longitud*m*9.8);
%raíz real de la ecuación cúbica x^3+a*x^2+b*x+c=0
a=0;
b=q0^4*k^2;
c=-b;
Q=(a^2-3*b)/9;
R=(2*a^3-9*a*b+27*c)/54;
A=-sign(R)*nthroot(abs(R)+sqrt(R^2-Q^3),3);
B=Q/A;
x=(A+B)-a/3;
%ángulo inicial
angulo=asin(sqrt(x));
disp(angulo*180/pi)
b=0.1; %pérdidas
f=@(t,x) [x(2); 9*(1-b*t)^3*q0^2*cos(x(1))/(4*m*longitud^3*sin(x(1))^2)
-9.8*sin(x(1))/longitud];
[t,x]=ode45(f,[0,1/b],[angulo,0]);
plot(t,x(:,1)*180/pi) %posición angular - tiempo
grid on
xlabel('t')
ylabel('\theta')
title('Electroscopio')
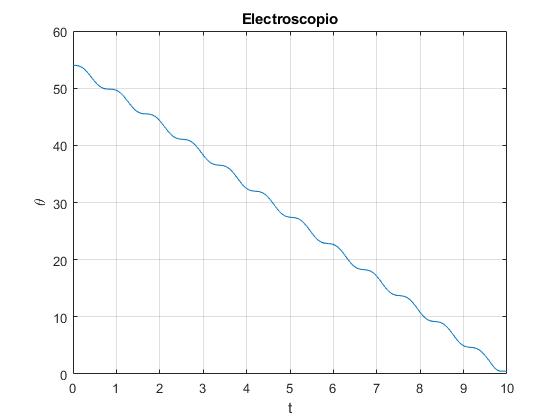
El ángulo inicial de equilibrio es θ0=54°. La bolita pierde su carga en el instante t=10 s, la posición angular del péndulo es 0.4760°
53.9847 >> x(end,1)*180/pi ans = 0.4760
A partir de esta posición, el péndulo se mueve hacia el origen, θ=0, bajo la acción de la componente tangencial del peso
Aproximación
Cuando la descarga de las bolitas es muy lenta, la aceleración es aproximadamente nula, la bolita está en cada instante en equilibrio
Eliminamos la tensión T. Para ángulo pequeños tanθ≈sinθ
La velocidad de aproximación, dr/dt
Representamos la velociad angular dθ/dt del péndulo en función del tiempo. Sustituyendo en el script las siguientes líneas de código
... plot(t,x(:,2)) %velocidad - tiempo v=-b*(18*longitud*q0^2/(9.8*m))^(1/3); %velocidad 'media' line([0,1/b],[v,v],'color','r') ...
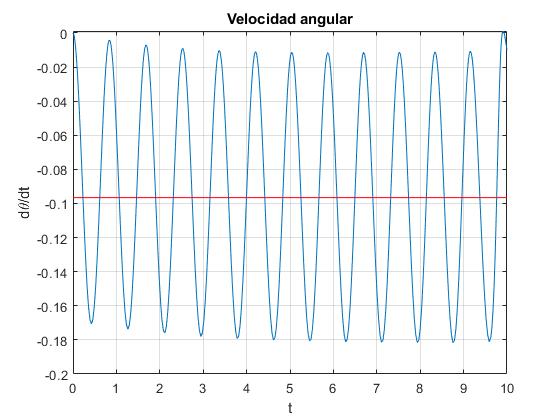
Vemos que la velocidad angular de aproximación no es constante, hay momentos en los que el péndulo casi se detiene, como apreciamos en la simulación más abajo. La línea horizontal representa, la velocidad de aproximación 'media', calculada suponiendo que el péndulo permanece en equilibrio en cada instante
Actividades
El programa interactivo genera aleatoriamente una carga q0 medida en μC, cada vez que se pulsa el botón titulado Nuevo.
A partir de la medida de su ángulo de desviación θ0, en la escala graduada angular, se puede calcular la carga q0 de la bolita resolviendo las dos ecuaciones de equilibrio .
Se introduce
- El valor de la masa m en gramos de la bolita, en el control titulado Masa.
- El valor del coeficiente de pérdida de carga b s-1 de la bolita, en el control titulado Pérdida de carga. El valor introducido se divide entre 100
- La longitud del hilo está fijado l=50 cm.
Cuando se pulsa el botón titulado ►, las bolitas empiezan a perder carga y se aproximan una a la otra.
Cuando han perdido toda la carga, las bolitas se siguen aproximando ya que sigue actuando la componente tangencial del peso. El movimiento se detiene cuando las bolitas descargadas llegan a la posición de equilibrio estable θ=0
En la parte superior izquierda, se proporcionan los datos de
- el tiempo, t
- la posición angular, θ en grados
- la velocidad angular, dθ/dt
- la carga, q de la bolita en μC
Repulsión de dos partículas cargadas
Consideremos ahora, que las bolitas, suspendidas cada una de un hilo de longitud L tienen distinta carga q1 y q2, ambas del mismo signo y distinta masa m1 y m2.
Las bolitas se repelen y forman ángulos θ1 y θ2 con la vertical, tal como se indica en la figura.
En la situación de equilibrio, las dos bolitas y el punto O de suspensión forman un triángulo isósceles, cuyo vértice forma un ángulo θ1+θ2 y la línea que une las bolitas forma con cada hilo un ángulo θ3. Como los ángulo interiores de un triángulo suman 180 grados
La separación de equilibrio entre las bolitas es 2Lcosθ3
Las fuerzas sobre la bolita izquierda de masa m1 y carga q1 son:
- El peso, m1g
- La tensión del hilo, T1
- La fuerza de repulsión F
Las fuerzas sobre la bolita derecha de masa m2 y carga q2 son:
- El peso, m2g
- La tensión del hilo, T2
- La fuerza de repulsión F, igual y de sentido contrario
No estamos interesados en las tensiones T1 y T2 de los hilos, por lo que proyectamos los pesos y las fuerzas de repulsión a lo largo de las direcciones perpendiculares a cada uno de los hilos, tal como se aprecia en la figura.
La condición de equilibrio en dicha dirección para la bolita izquierda, se escribe
m1gcos(90-θ1)=F·cos(90-θ3)
y de modo análogo, para la bolita derecha
m2gcos(90-θ2)=F·cos(90-θ3)
El sistema de dos ecuaciones con dos incógnitas, θ1 y θ2, se escribe
Definimos los parámetros adimensionales m=m1/m2 y
El sistema de dos ecuaciones se reduce a otro más simple
m=1.3; k=0.275; x0=[pi/6,pi/3]; g=@(x) [sin(x(1))-k*cos((x(2)+x(1))/2)/(sin((x(2)+x(1))/2)^2), sin(x(2))-m*sin(x(1))]; [x,fval]=fsolve(g,x0); x*180/pi
ans = 32.8858 44.8987
Los ángulos de equilibrio que forman los hilos con la vertical para los valores de los parámetros adimensionales m=1.3 y k=0.275, son: θ1=32.9° y θ2=44.9°
Estabilidad de la solución
Vamos a comprobar que los ángulos de equilibrio calculados, corresponden a una situación de equilibrio estable, es decir, la energía potencial presenta un mínimo
La energía de este sistema de dos partículas interactuantes es igual a la suma de la energía potencial correspondiente al peso de cada bolita y la energía de interacción eléctrica
Establecemos el origen de la energía potencial gravitatoria en la posición en que se encuentran las bolitas descargadas, L por debajo del vértice O. Cuando una bolita se desplaza θ1 se eleva L(1-cosθ1) y su energía potencial se incrementa en m1gL(1-cosθ1). La energía potencial de la segunda bolita cuando se desplaza θ2, es m2gL(1-cosθ2)
El nivel cero de la energía potencial correspondiente a la interacción eléctrica está en el infinito.
Cuando las cargas están separadas una distancia 2Lcosθ3, la energía potencial total es
Con sinθ2=m·sinθ1
m=1.3;
k=0.275;
x0=[pi/6,pi/3];
g=@(x) [sin(x(1))-k*cos((x(2)+x(1))/2)/(sin((x(2)+x(1))/2)^2),
sin(x(2))-m*sin(x(1))];
[x,fval]=fsolve(g,x0);
%representa la energía potencial en un intervalo de 10º alrededor del
%mínimo
fi_1=x(1)-pi/18:0.1*pi/180:x(1)+pi/18;
fi_2=asin(m*sin(fi_1));
u=m*(1-cos(fi_1))+(1-cos(fi_2))+2*m*k./sin((fi_1+fi_2)/2);
plot(fi_1*180/pi,u)
grid on
xlabel('\theta')
ylabel('u(\theta)')
title('Energía potencial')
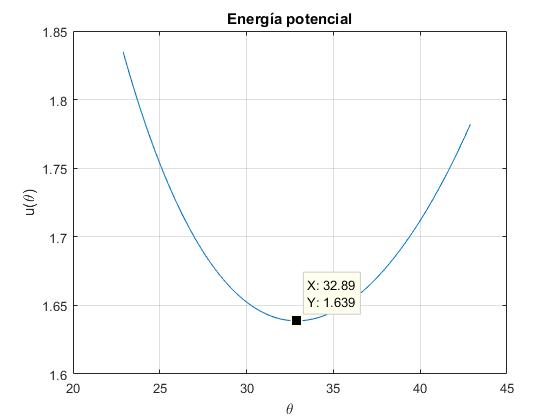
La energía potencial reducida u(θ1) presenta un mínimo en θ1=32.9° por tanto, se trata de una posición de equilibrio estable
Fijando m=2, trazamos la gráfica θ1 y θ2 según vamos incrementando el parámetro k de 0 a 2, es decir la fuerza de repulsión F o las cargas de las partículas.
m=2;
x0=[pi/6,pi/3];
ang=zeros(2,201);
i=0;
for k=0:0.01:2;
g=@(x) [sin(x(1))-k*cos((x(2)+x(1))/2)/(sin((x(2)+x(1))/2)^2),
sin(x(2))-m*sin(x(1))];
[x,fval]=fsolve(g,x0);
i=i+1;
ang(1,i)=x(1)*180/pi;
ang(2,i)=x(2)*180/pi;
end
plot(0:0.01:2,ang(1,:),'r',0:0.01:2,ang(2,:),'b');
grid on
xlabel('f')
ylabel('\theta_1, \theta_2')
title('Angulos de equilibrio')
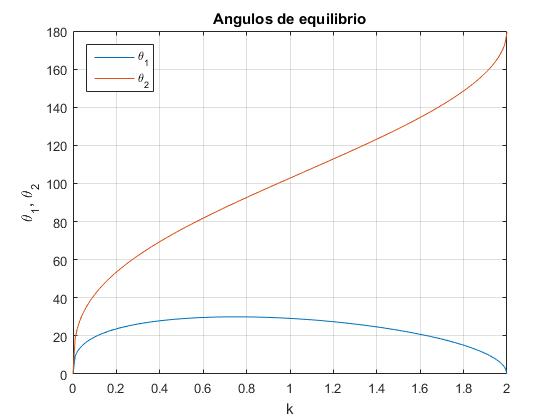
Como vemos en la gráfica, para m>1 a medida que k crece el ángulo θ2 alcanza los 90°, entonces de la segunda ecuación θ1=asin(1/m). Introducimos este valor en la primera ecuación y despejamos k
Desarrollando, el seno y coseno de la suma de dos ángulos y elevando al cuadrado, despejamos k
Para m=2, el segundo hilo se desvía θ2=90° y el primero, θ1=30° para k=3/4. Al aumentar k, θ1 decrece a cero y θ2 crece hasta el valor de 180° cuando se alcanza un valor máximo de k=2.
Las bolitas tiene la misma masa y carga
Consideremos de nuevo, el caso en el que las bolitas tienen la misma carga q1=q2=q, ambas del mismo signo y la misma masa m1=m2=m.
Entonces, θ1=θ2=θ, θ3=π/2-θ. La condición de equilibrio, se escribe
En términos del parámetro adimensional k
Obtenemos una ecuación cúbica en x=sin2θ
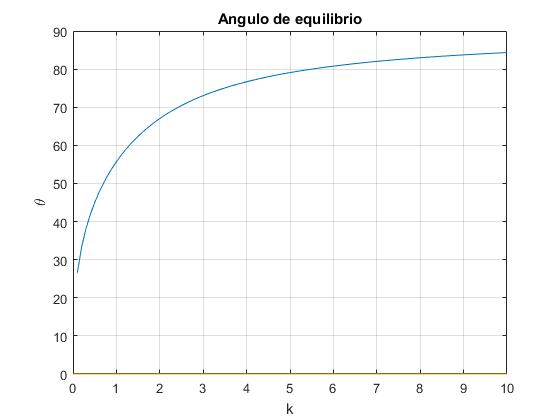
Calculamos y rerpesentamos los ángulos de equilibrio θ a medida que incrementamos el parámetro k, la carga q de las partículas. El ángulo θ tiende hacia 90°
k=0:0.1:10;
%raíz real de la ecuación cúbica x^3+a*x^2+b*x+c=0
a=0;
b=k.^2;
c=-b;
Q=(a^2-3*b)/9;
R=(2*a^3-9*a*b+27*c)/54;
A=-sign(R).*nthroot(abs(R)+sqrt(R.^2-Q.^3),3);
B=Q./A;
ang=asin(sqrt(A+B-a/3));
plot(k,ang*180/pi);
grid on
xlabel('k')
ylabel('\theta')
title('Angulo de equilibrio')
Referencias
Physics Challenges for Teachers and Students. A Slow Approach. The Physics Teacher. Vol. 42, February 2004. pp. 124
Carl E Mungan. Electrostatic repulsion of charged pith balls hanging from strings. Eur. J. Phys. 32 (2011) 207-212.
Este artículo está disponible en la dirección: https://www.usna.edu/Users/physics/mungan/Publications/Publications.php#fndtn-panel120162017