

Movimiento del extremo de una cadena bajo la acción de un fuerza constante
Consideremos una cadena delgada, idealmente flexible, de densidad ρ que está apilada en el suelo. Estudiaremos el movimiento de un extremo de la cadena cuando se le aplica una fuerza constante F. Dicha fuerza sería igual a la diferencia entre el empuje y el peso del globo atado a su extremo.
Situando el origen en el suelo, la posición del extremo de la cadena es x>0. Supondremos que en determinado instante t, hay una parte de la cadena x en movimiento con velocidad v y la otra parte, en reposo sobre el suelo.
Equilibrio
La cadena está en equilibrio, cuando la fuerza aplicada F es igual al peso de la parte de la cadena que cuelga xe.
F=ρgxe
Cuando el extremo de la cadena está a una altura x0<xe y se suelta, vamos a estudiar el movimiento hacia arriba y hacia abajo de dicho extremo.
Movimiento hacia arriba (v>0)
La derivada del momento lineal p, de la parte de la cadena que se mueve, con respecto al tiempo t, es igual a la fuerza resultante
donde p es el momento lineal p=(ρx)·v
Se resuelve esta ecuación diferencial por procedimientos numéricos con las condiciones iniciales t=0, x=x0, v=dx/dt=0.
-
Cuando x<xe, el extremo de la cadena incrementa su velocidad hacia arriba, ya que la fuerza aplicada F es mayor que el peso ρgx.
-
Cuando x>xe, el extremo de la cadena disminuye su velocidad ya que la fuerza aplicada F es menor que el peso ρgx.
-
Cuando la velocidad final se haga cero, (posición de retorno x1) el movimiento hacia arriba cesa y el extremo de la cadena inicia su movimiento hacia abajo.
Cálculo de la posición de retorno x1.
Escribiendo la ecuación diferencial del movimiento de la forma
Teniendo en cuenta que
Integramos
Como la velocidad inicial v0=0, y la velocidad final en la posición de retorno x=x1 es igualmente nula v=0, llegamos a la ecuación cúbica
Una de cuyas raíces es x0, la posición de partida.
La raíz positiva x1 de la ecuación de segundo grado es
donde xe=F/(ρg) es la posición de equilibrio.
Movimiento hacia abajo (v<0)
En el caso del movimiento hacia abajo, la situación es diferente. En un intervalo de tiempo dt, una masa dm de la cadena cuya velocidad es v, choca inelásticamente contra el suelo y se detiene completamente. Esta disminución de momento lineal v·dm de la cadena en el tiempo dt, se debe a su interacción con el suelo, que podemos describir mediante una fuerza hacia arriba Fs= vdm/dt=ρv2
Una explicación más completa se encuentra al final de la página titulada Movimiento de una cadena con una máquina de Atwood
La derivada del momento lineal p de la parte de la cadena que se mueve con respecto al tiempo t es igual a la fuerza resultante
Se resuelve la ecuación diferencial por procedimientos numéricos
con las condiciones iniciales siguientes: en el instante t1, x=x1, v=dx/dt=0.
-
Cuando x>xe, el extremo de la cadena incrementa su velocidad hacia abajo, ya que el peso ρgx es mayor que la fuerza aplicada F.
-
Cuando x<xe, el extremo de la cadena disminuye su velocidad ya que la fuerza aplicada F es mayor que el peso ρgx.
-
Cuando la velocidad final se haga cero, (posición de retorno x2) el movimiento hacia abajo cesa y el extremo de la cadena inicia su movimiento hacia arriba.
Caso particular.
Cuando la fuerza F=0, la cadena cae libremente. La velocidad de caída del extremo libre es v=-g·t. La fuerza que ejerce el suelo para parar los eslabones que caen es
Suponemos que v=0, cuando x=L, siendo L la longitud de la cadena. En el instante t, la altura del último eslabón de la cadena es x, una longitud L-x se encuentra en reposo sobre el suelo.
La reacción N del suelo es la suma de dos términos:
-
la fuerza Fs que ejerce el suelo para parar los eslabones de la cadena que caen
-
el peso de la porción (L-x) de cadena que ya está en reposo sobre el suelo
Siendo M=ρL la masa de la cadena.
Cuando llega el último eslabón de la cadena al suelo x=0.
N=3Mg
Si dejamos caer la cadena sobre el plato de una balanza, ésta medirá una fuerza máxima 3Mg.
Resumiendo: cuando la cadena está completamente levantada con el primer eslabón tocando el plato de la balanza, ésta mide una fuerza nula. Cuando el último eslabón cae sobre el plato, la balanza mide una fuerza máxima igual a tres veces el peso de la cadena. Finalmente, la balanza mide una fuerza igual al peso de la cadena.
Cálculo de la posición de retorno x2.
Escribimos la ecuación diferencial del movimiento de la forma
Integramos
En la posición de retorno x2, la velocidad del extremo de la cadena es v=0.
donde es la posición de equilibrio.
Conocido x1 se calcula x2, resolviendo la ecuación trascendente por procedimientos numéricos.
La posición de retorno x2 es ahora la posición de partida x0 para el movimiento hacia arriba y así, sucesivamente.
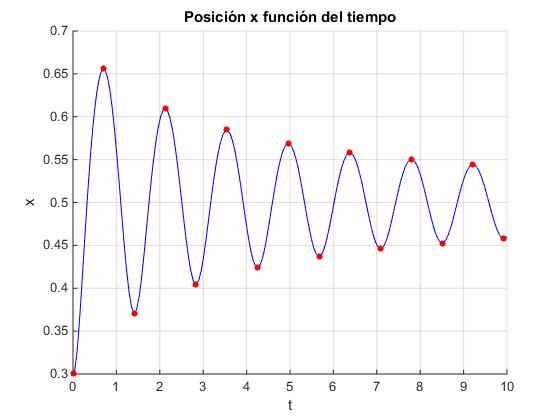
El extremo de la cadena describe una oscilación amortiguada. Al cabo de un cierto tiempo teóricamente infinito, el extremo de la cadena se encuentra en la posición de equilibrio xe.
Cálculo con MATLAB
Posiciones de retorno
Calculamos las primeras posiciones de retorno. Aquellas en las que la velocidad v=0
xe=0.5; %altura de equilibrio
xAbajo=0.3; %altura inicial menor que la de equilibrio
x0=xAbajo;
for i=1:10
%movimiento hacia arriba
xArriba=(3*xe/2-x0)/2+sqrt(-3*x0^2+9*xe^2/4+3*xe*x0)/2;
x0=xArriba;
disp([xAbajo xArriba])
%movimiento hacia abajo
f=@(x) xe*log(x0/x)-x0+x;
xAbajo=fzero(f,[xAbajo xe]);
x0=xAbajo;
end
0.3000 0.6558
0.3710 0.6096
0.4044 0.5847
0.4239 0.5690
0.4368 0.5582
0.4460 0.5504
0.4528 0.5444
0.4581 0.5397
0.4623 0.5359
0.4657 0.5328
La sucesión converge hacia la posición de equilibrio xe=0.5
Posición en función del tiempo
Resolvemos las dos ecuaciones diferenciales de segundo orden: la primera describe el movimiento de la cadena hacia arriba y la segunda hacia abajo
function z = mov_cadenaGlobo(~,x,xe)
%x(1) es x
%x(2) es v
z=zeros(2,1);
z(1)=x(2);
if x(2)>0 %hacia arriba (velocidad positiva)
z(2)=9.8*(xe/x(1)-1-x(2)^2/(9.8*x(1)));
else %hacia abajo (velocidad negativa)
z(2)=9.8*(xe/x(1)-1);
end
end
xe=0.5; %altura de equilibrio
opts=odeset('events',@parabola_ode45);
f=@(t,x) mov_cadenaGlobo(t,x,xe);
[t,x,te,xe,ie]=ode45(f,[0,10],[0.3,0],opts);
hold on
plot(t,x(:,1),'b')
plot(te(ie==1),xe(ie==1),'ro','markersize',4,'markerfacecolor','r')
hold off
grid on
xlabel('t')
ylabel('x');
title('Posición x función del tiempo')
Para marcar las posiciones de retorno definimos la función, que ya se ha utilizado en Movimiento sobre una superficie parabólica
function [detect,stopin,direction]=parabola_ode45(~,x)
detect=x(2);
stopin=0;
direction=0;
end
Actividades
Se introduce
-
La posición inicial del extremo de la cadena x0<xe, en el control titulado Altura inicial.
-
La altura de equilibrio se ha fijado en xe=0.5 m
Se pulsa el botón titulado Nuevo.
Se observa el movimiento del extremo de la cadena hacia arriba y hacia abajo
Se representan las fuerzas sobre la cadena:
-
El peso de la parte de la cadena que se mueve
-
La fuerza F aplicada
-
En el movimiento hacia abajo, la fuerza que ejerce el suelo sobre la cadena Fs es pequeña en comparación con las otras dos.
Se representa las posiciones de retorno x0, x1, x2,… en una regla situada a la izquierda.
Se representa la altura x del extremo de la cadena en función del tiempo t.
Se dispara una flecha atada a una cuerda muy larga
Se dispara verticalmente, una flecha de masa M atada a una cuerda muy larga de densidad ρ. Supondremos que no hay rozamiento
La fuerza F es el peso Mg de la flecha y apunta hacia abajo. La ecuación del movimiento es
donde p es el momento lineal de la flecha y de la parte x de cuerda que se mueven con velocidad v=dx/dt.
Velocidad en función de la altura
Expresamos la velocidad v en función de la posición x de la flecha teniendo en cuenta que
La ecuación del movimiento se escribe
Integrando entre la posición inicial x=0 y la final x
Haciendo el cambio de variable u=M+ρx, du=ρ·dx
Despejamos la velocidad v
Altura máxima
La altura máxima se alcanza cuando la velocidad v=0
Cuando se dispara la flecha verticalmente sin cuerda, alcanza una altura máxima mayor
Se obtiene de la fórmula xm en el límite, cuando ρ→0.
Llamando,
>> syms a x; >> limit(((a*x+1)^(1/3)-1)/x,x,0) ans =a/3
Representamos la velocidad de una flecha de masa M=10 kg que se dispara verticalmente con velocidad inicial v0=30 m/s, atada a una cuerda muy larga de densidad ρ=0.1 kg/m
M=10; %kg, masa flecha
rho=0.1; % kg/m densidad lineal
v0=30; % m/s, velocidad inicial
f=@(x) sqrt(v0^2-2*M*9.8*((1+rho*x/M).^3-1)/(3*rho))./(1+rho*x/M);
xm=M*((3*rho*v0^2/(2*M*9.8)+1)^(1/3)-1)/rho; %altura máxima
hold on
fplot(f,[0,xm]) %con cuerda
fplot(@(x) sqrt(v0^2-2*9.8*x),[0, v0^2/(2*9.8)]) %sin cuerda
hold off
grid on
xlabel('x (m)')
ylabel('v (m/s)');
legend('con cuerda','sin cuerda', 'Location','best')
title('Movimiento de la flecha')
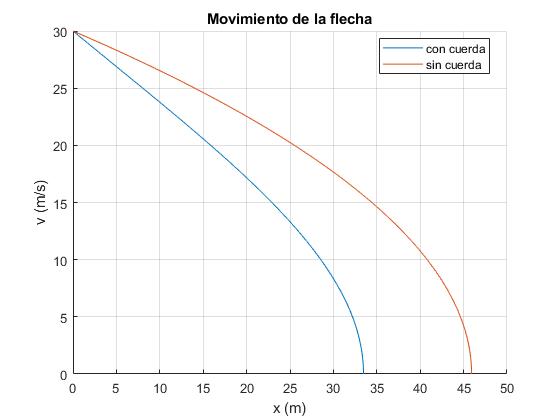
La altura máxima es
>> xm xm = 33.4678 >> v0^2/(2*9.8) ans = 45.9184
Ecuación del movimiento
La ecuación del movimiento es
Resolvemos la ecuación del movimiento por el procedimiento numérico
El procedimiento numérico se interrumpe cuando se alcanza la altura máxima dx/dt=0
function flecha
M=10; %kg, masa flecha
rho=0.1; % kg/m densidad lineal
v0=30; % m/s, velocidad inicial
opts=odeset('events',@flecha_ode45);
f=@(t,x)[x(2); -(rho*x(2)^2+(rho*x(1)+M)*9.8)/(M+rho*x(1))];
[t,x]=ode45(f,[0,5],[0,v0], opts);
hold on
plot(t,x(:,1)) %con cuerda
fplot(@(t) v0*t-4.9*t.^2,[0,v0/9.8]) %sin cuerda
hold off
grid on
xlabel('t (s)')
ylabel('x (m)');
legend('con cuerda','sin cuerda', 'Location','best')
title('Movimiento de la flecha')
disp([t(end),x(end,1)])
function [detect,stopin,direction]=flecha_ode45(~,x)
detect=x(2);
stopin=1;
direction=-1;
end
end
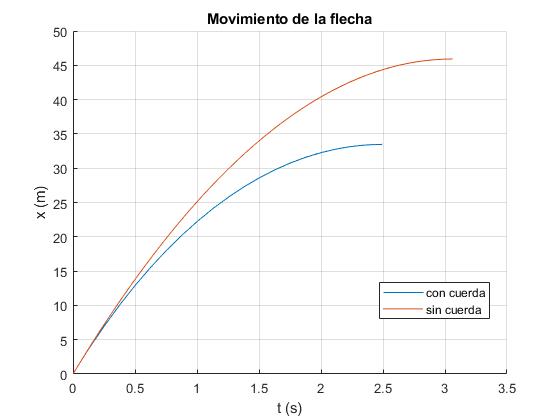
La altura máxima es xm=33.4679 m, y el tiempo que tarda en alcanzarla es tm=2.4937 s
2.4937 33.4679
Referencias
Sima V., Podolsky J., Buquoy's problem. Eur. J. Phys. 26 (2005) pp. 1037-1045
van den Berg W. H. Force exerted by a falling chain. The Physics Teacher, 36, January 1998, pp. 44-45
Carl E. Mungan, Trevor C. Lipscombe. Vertical Launch of a Grappling Hook. The Physics Teacher, Vol. 60, May 2022. pp. 327-330