

Proyectil que desliza sobre un plano inclinado
Consideremos un proyectil de masa m, que es lanzado desde el origen O con velocidad v0 haciendo un ángulo θ0 con el eje X. En un momento dado, la posición del proyectil es (x,y), su vector velocidad v es tangente a la trayectoria y forma un ángulo θ con el eje X.
Las fuerzas que actúan sobre el proyectil son:
- el peso, mg
- la reacción del plano, N=mgcosα
- la fuerza de rozamiento Fr=μN, tiene la dirección de la velocidad y de sentido contrario
Casos particulares
Los casos particulares más sencillos se producen cuando el ángulo de tiro θ0=π/2 y cuando θ0=-π/2.
θ0=π/2
El proyectil se detiene, v=0, en la posición
θ0=-π/2
El proyectil se detiene, v=0, si μcosα>sinα, μ>tanα, en la posición
Si no se cumple esta condición, el proyectil continuará su movimiento descendente a lo largo del eje Y del plano inclinado
Movimiento general
Escribimos las ecuaciones del movimiento en la dirección tangencial y en la dirección normal
donde ρ es el radio de curvatura de la trayectoria.
En el intervalo de tiempo comprendido entre t y t+dt, la dirección del vector velocidad cambia un ángulo dθ, que es el ángulo entre las tangentes o entre las normales. El móvil se desplaza en este intervalo de tiempo un arco ds=ρ·dθ, tal como se aprecia en la figura.
Hemos de tener en cuenta que la curvatura de la trayectoria es negativa (figura de la derecha). La curva queda a la derecha de la tangente tomada en sentido de las x crecientes. La igualdad anterior se escribe para este caso
Las ecuaciones del movimiento en la dirección tangencial y en la dirección normal se convierten en una única ecuación diferencial de primer orden.
Sea f=μ/tanα
- Si f>1, la fuerza de rozamiento μmgcosα será mayor que la componente del peso mgsinα y el proyectil se detendrá
- Si f≤1, el movimiento continuará sin límite
Velocidad del proyectil
Integramos la ecuación diferencial, teniendo en cuenta que en el cuerpo se lanza del origen con velocidad v0 haciendo un ángulo θ0 con la horizontal
Se ha utilizado el resultado de la integral de la inversa del coseno
Tiempo de vuelo
ds=v·dt
ρdθ= v·dt
Haciendo los cambios de variable
llegamos al siguiente resultado
Abscisa x
dx=ds·cosθ=ρdθ·cosθ
Haciendo los cambios de variable
Llegamos al siguiente resultado
Ordenada y
dy=ds·sinθ=ρdθ·sinθ
Haciendo los cambios de variable
llegamos al siguiente resultado
Trayectorias cuando el proyectil se detiene, f>1
Cuando f>1 el proyectil se detiene v=0, la dirección de la velocidad hace un ángulo θ=-π/2.
En la expresión de la velocidad v en función del ángulo θ
obtenemos un cociente 0/0 cuando θ=-π/2. Resolvemos esta indeterminación, del siguiente modo
Otro resultado notable, el límite tiende a 1/2 cuando f=1
Teniendo en cuenta este resultado para f>1, el instante t1 en el que el proyectil se detiene es
Su posición (x1, y1) es
Representamos la velocidad del proyectil en función del tiempo hasta que se detiene. El ángulo de disparo es θ0=-30°, el ángulo del plano inclinado es α=30°, la velocidad de disparo es v0=1, y el parámetro que mide el rozamiento f=2
f=2;
alfa=pi/6;
ang=-pi/6;
v0=1;
v=@(th) v0*((cos(ang)./cos(th)).^(f+1)).*((1+sin(th))/(1+sin(ang))).^f;
t=@(th) v0*((f-sin(ang))-((cos(ang)./cos(th)).^(f+1)).*
(((1+sin(th))/(1+sin(ang))).^f).*(f-sin(th)))/((f^2-1)*9.8*sin(alfa));
fplot(t,v,[-pi/2,ang])
grid on
xlabel('t')
ylabel('v')
title('velocidad')
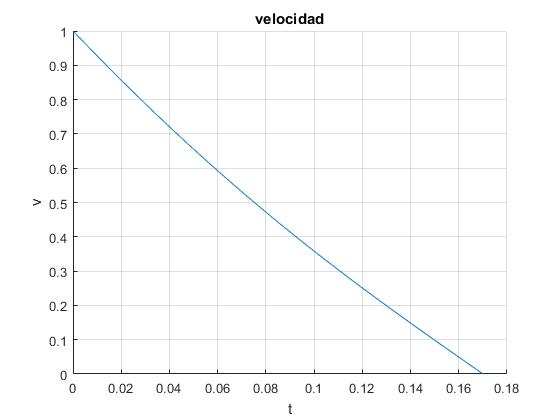
Calculamos el tiempo t1 que tarda en detenerse
>> t1 = v0*(f - sin(ang))/((f^2 - 1)*9.8*sin(alfa)) t1 = 0.1701
Casos particulares
-
Para θ0=π/2
-
Para θ0=-π/2
Resultados que hemos obtenido al principio de esta página
Dibujamos la curva que une los puntos (x1, y1) para todos los ángulos de tiro -π/2≤θ0≤π/2 para un determinado valor de f>1. Se ha fijado la velocidad de disparo
hold on
for f=[2,3,4,6,10]
x1=@(th) (2*f-sin(th)).*cos(th)/(4*f^2-1);
y1=@(th) (2*f*sin(th)-1-sin(th).^2)/(4*(f^2-1));
fplot(x1,y1,[-pi/2,pi/2], 'displayName',num2str(f));
end
axis equal
hold off
grid on
legend('-DynamicLegend','location','northeast')
xlabel('x')
ylabel('y')
title('Envolventes')
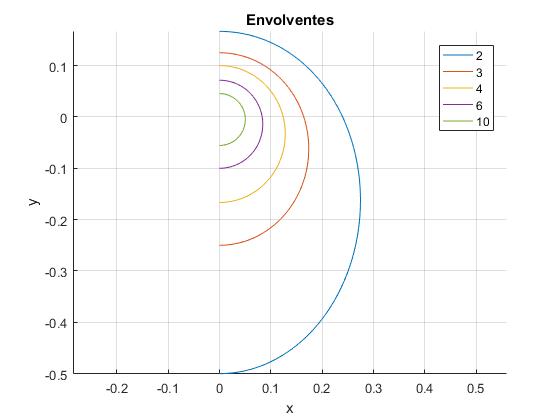
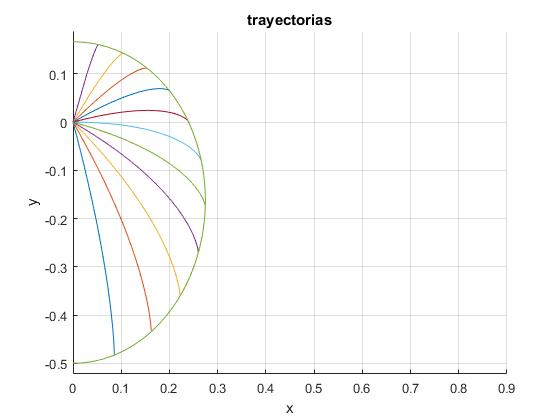
El proyectil recorre más distancia cuando el ángulo de tiro apunta hacia abajo θ0=-π/2 que cuando apunta hacia arriba θ0=π/2. A medida que se incrementa el rozamiento f, las distancias hasta que se detiene el proyectil se hacen cada vez más pequeñas
Cuando f se hace grande, (x1, y1) tienden a
Los puntos (x1, y1) están situados en una semicircunferencia de radio r (la más interior de color verde, con la etiqueta de f=10)
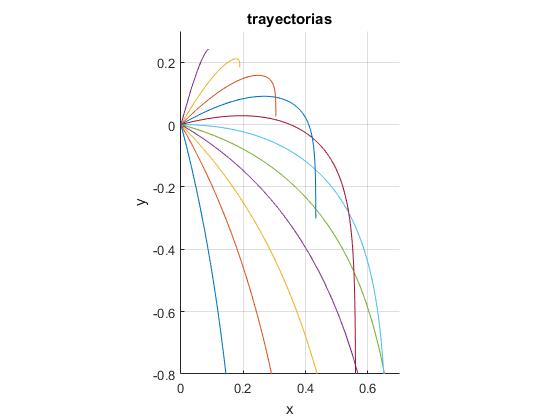
Dibujamos las trayectorias de los proyectiles lanzados con la misma velocidad de disparo v0, con ángulos de tiro espaciados 15°=π/12. El valor del parámetro f=2. Se dibuja la curva que une los puntos (x1, y1) en los que se detiene el proyectil
f=2;
hold on
for ang=-pi/2+pi/12:pi/12:pi/2-pi/12
x=@(th) ((2*f-sin(ang))*cos(ang)-((cos(ang)./cos(th)).^(2*f+2)).
*(((1+sin(th))/(1+sin(ang))).^(2*f)).*cos(th).*(2*f-sin(th)))/(4*f^2-1);
y=@(th) ((2*f*sin(ang)-1-sin(ang)^2)-((cos(ang)./cos(th)).^(2*f+2)).
*(((1+sin(th))/(1+sin(ang))).^(2*f)).*(2*f*sin(th)-1-sin(th).^2))/(4*(f^2-1));
fplot(x,y,[-pi/2,ang])
end
x1=@(th) (2*f-sin(th)).*cos(th)/(4*f^2-1);
y1=@(th) (2*f*sin(th)-1-sin(th).^2)/(4*(f^2-1));
fplot(x1,y1,[-pi/2,pi/2]);
axis equal
xlim([0,0.9])
grid on
hold off
xlabel('x')
ylabel('y')
title('trayectorias')
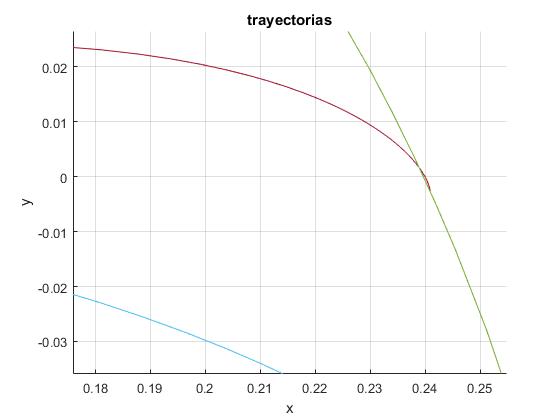
Utilizamos las herramientas Zoom in y Pan de la ventana gráfica, para observar el final de la trayectoria de un proyectil, cómo se curva hasta que la tangente a la trayectoria alcanza el ángulo límite θ=-π/2
Trayectorias cuando el proyectil no se detiene, f<1
Velocidad del proyectil
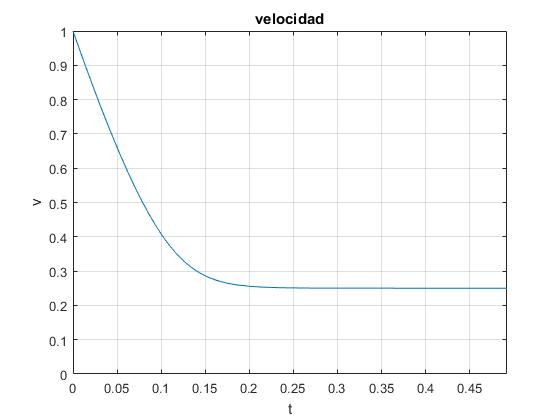
Representamos la velocidad del proyectil en función del tiempo, para un ángulo de tiro de θ=45°, la velocidad de disparo es v0=1, el ángulo del plano inclinado α=30°, el parámetro f=0.7
f=0.7;
alfa=pi/6;
ang=pi/4;
v=@(th) ((cos(ang)./cos(th)).^(f+1)).*((1+sin(th))/(1+sin(ang))).^f;
t=@(th) ((f-sin(ang))-((cos(ang)./cos(th)).^(f+1)).*
(((1+sin(th))/(1+sin(ang))).^f).*(f-sin(th)))/((f^2-1)*9.8*sin(alfa));
fplot(t,v,[-pi/2+0.001,ang])
grid on
xlabel('t')
ylabel('v')
title('velocidad')
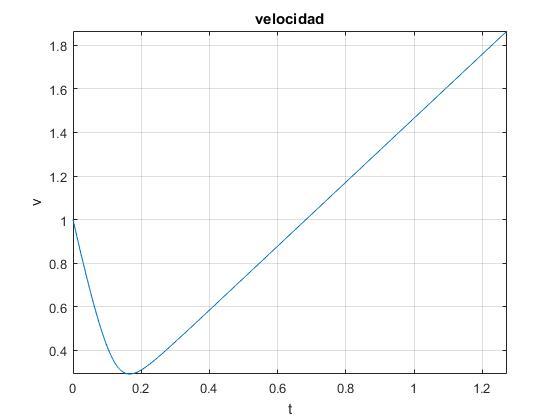
Vemos que el módulo de la velocidad disminuye, hasta que alcanza la altura máxima y luego vuelve a aumentar
Trayectorias de los proyectiles
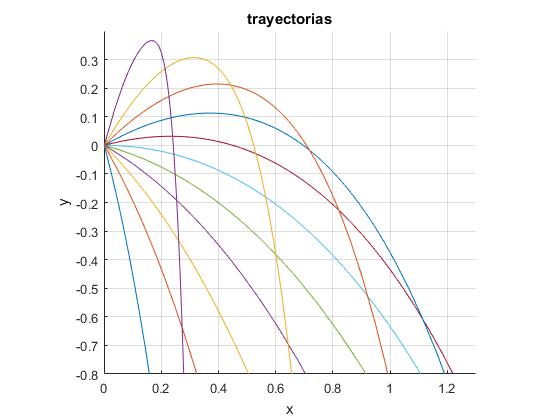
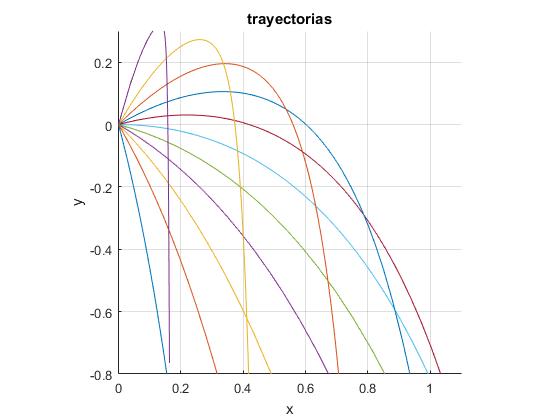
Examinamos las trayectorias de los proyectiles disparados desde el origen con ángulos espaciados 15°, para f=0.7
f=0.7;
hold on
for ang=-pi/2+pi/12:pi/12:pi/2-pi/12
x=@(th) ((2*f-sin(ang))*cos(ang)-((cos(ang)./cos(th)).^(2*f+2)).
*(((1+sin(th))/(1+sin(ang))).^(2*f)).*cos(th).*(2*f-sin(th)))/(4*f^2-1);
y=@(th) ((2*f*sin(ang)-1-sin(ang)^2)-((cos(ang)./cos(th)).^(2*f+2)).
*(((1+sin(th))/(1+sin(ang))).^(2*f)).*(2*f*sin(th)-1-sin(th).^2))/(4*(f^2-1));
fplot(x,y,[-pi/2+0.0001,ang])
end
axis equal
ylim([-0.8,0.3])
xlim([0,0.9])
grid on
hold off
xlabel('x')
ylabel('y')
title('trayectorias')
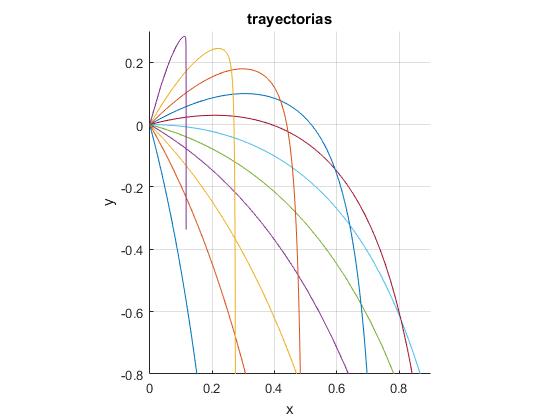
Observamos que los proyectiles disparados con un ángulo próximo a 90° se curvan rápidamente y descienden siguiendo una trayectoria que es casi una línea recta paralela al eje Y. Observamos que el alcance de los proyectiles está limitado
Cuando θ tiende a -π/2, la ordenada y tiende a infinito. Sin embargo, la abscisa x tiene un comportamiento diferente
Otro resultado notable, el límite tiende a 1/2 cuando f=0.5
Llevando este resultado a la expresión de x (aquí abajo) obtenemos x∞
Representamos la trayectoria de un proyectil disparado con ángulo de tiro θ0=π/4, y dibujamos mediante una línea a trazos su asíntota vertical x∞
f=0.7;
ang=pi/4;
x=@(th) ((2*f-sin(ang))*cos(ang)-((cos(ang)./cos(th)).^(2*f+2)).
*(((1+sin(th))/(1+sin(ang))).^(2*f)).*cos(th).*(2*f-sin(th)))/(4*f^2-1);
y=@(th) ((2*f*sin(ang)-1-sin(ang)^2)-((cos(ang)./cos(th)).^(2*f+2)).
*(((1+sin(th))/(1+sin(ang))).^(2*f)).*(2*f*sin(th)-1-sin(th).^2))/(4*(f^2-1));
fplot(x,y,[-pi/2+0.0001,ang])
x_inf=(2*f-sin(ang))*cos(ang)/(4*f^2-1);
line([x_inf,x_inf],[-0.8,0.4],'linestyle','--','color','k')
axis equal
ylim([-0.8,0.4])
xlim([0,1.3])
grid on
xlabel('x')
ylabel('y')
title('trayectorias')
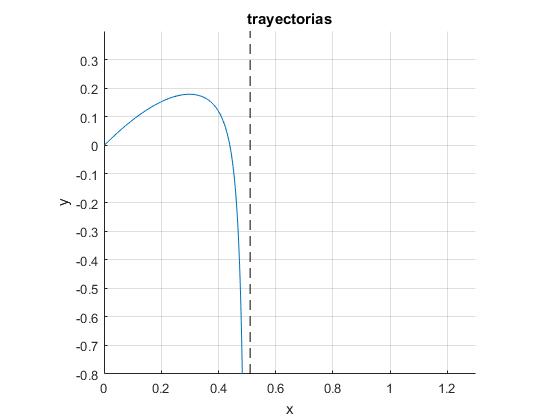
La altura máxima de un proyectil disparado con ángulo de tiro, θ0>0, se obtiene para θ=0
>> y(0) ans = 0.1787
Cambiamos el parámetro f=0.3, y volvemos a dibujar las trayectorias
f=0.3;
hold on
for ang=-pi/2+pi/12:pi/12:pi/2-pi/12
x=@(th) ((2*f-sin(ang))*cos(ang)-((cos(ang)./cos(th)).^(2*f+2)).
*(((1+sin(th))/(1+sin(ang))).^(2*f)).*cos(th).*(2*f-sin(th)))/(4*f^2-1);
y=@(th) ((2*f*sin(ang)-1-sin(ang)^2)-((cos(ang)./cos(th)).^(2*f+2)).
*(((1+sin(th))/(1+sin(ang))).^(2*f)).*(2*f*sin(th)-1-sin(th).^2))/(4*(f^2-1));
fplot(x,y,[-pi/2+0.0001,ang])
end
axis equal
ylim([-0.8,0.4])
xlim([0,1.3])
grid on
hold off
xlabel('x')
ylabel('y')
title('trayectorias')
Casos especiales f=1 y f=0.5
Examinamos primeros el caso f=1, la velocidad del proyectil es
Hemos demostrado que el límite cuando θ tiende a -π/2
La velocidad tiende al valor constante
Para f=1, tenemos que volver a calcular la expresión del tiempo t y la expresión de la ordenada y, debido a que en el denominador contienen el término (f2-1) que se hace cero
Tiempo t
Haciendo los cambios de variable
llegamos al siguiente resultado
Representamos la velocidad del proyectil en función del tiempo, para un ángulo de tiro θ0=30°, la velocidad de disparo es v0=1, el ángulo del plano inclinado α=30°, el parámetro f=1
f=1;
alfa=pi/6;
ang=pi/6;
v=@(th) ((cos(ang)./cos(th)).^(f+1)).*((1+sin(th))/(1+sin(ang))).^f;
t=@(th) cos(ang)^2*(((1+sin(ang))/cos(ang))^2/2+log((1+sin(ang))/cos(ang))
-((1+sin(th))./cos(th)).^2/2-log((1+sin(th))./cos(th)))
/(2*9.8*sin(alfa)*(1+sin(ang)));
fplot(t,v,[-pi/2+0.001,ang])
grid on
ylim([0,1])
xlabel('t')
ylabel('v')
title('velocidad')
Observamos que la velocidad tiende hacia un valor límite constante
0.5*cos(ang)^2/(1+sin(ang)) ans = 0.2500
Ordenada y
Haciendo los cambios de variable
Llegamos al siguiente resultado
La expresión de la abscisa x sigue siendo la misma que hemos deducido para los otros casos
Dibujamos las trayectorias de los proyectiles lanzados con la misma velocidad de disparo v0, con ángulos de tiro espaciados 15°=π/12. El valor del parámetro f=1.
f=1;
hold on
for ang=-pi/2+pi/12:pi/12:pi/2-pi/12
x=@(th) ((2*f-sin(ang))*cos(ang)-((cos(ang)./cos(th)).^(2*f+2)).
*(((1+sin(th))/(1+sin(ang))).^(2*f)).*cos(th).*(2*f-sin(th)))/(4*f^2-1);
y=@(th) cos(ang)^4*(((1+sin(ang))/cos(ang))^4/4-log((1+sin(ang))/cos(ang))-
((1+sin(th))./cos(th)).^4/4+log((1+sin(th))./cos(th)))/(4*(1+sin(ang))^2);
fplot(x,y,[-pi/2,ang])
end
axis equal
ylim([-0.8,0.3])
xlim([0,0.7])
grid on
hold off
xlabel('x')
ylabel('y')
title('trayectorias')
La abscisa x está limitada cuando θ tiende a -π/2, situación que ya observamos para 0.5<f≤1
f=0.5
Examinamos ahora el caso f=0.5. El denominador de la abscisa x contiene el término (4f2-1), que se hace cero cuando f=0.5. Es preciso volver a calcular la abscisa x
Haciendo los cambios de variable
Llegamos al resultado
Las expresiones de la ordenada y y del tiempo t no han cambiado
Dibujamos las trayectorias de los proyectiles lanzados con la misma velocidad de disparo v0, con ángulos de tiro espaciados 15°=π/12. El valor del parámetro f=0.5.
f=0.5;
hold on
for ang=-pi/2+pi/12:pi/12:pi/2-pi/12
x=@(th) cos(ang)^3*(((1+sin(ang))/cos(ang))^2/2+log((1+sin(ang))/cos(ang))-
((1+sin(th))./cos(th)).^2/2-log((1+sin(th))./cos(th)))/(2*(1+sin(ang)));
y=@(th) ((2*f*sin(ang)-1-sin(ang)^2)-((cos(ang)./cos(th)).^(2*f+2)).
*(((1+sin(th))/(1+sin(ang))).^(2*f)).*(2*f*sin(th)-1-sin(th).^2))/(4*(f^2-1));
fplot(x,y,[-pi/2,ang])
end
axis equal
ylim([-0.8,0.3])
xlim([0,1.1])
grid on
hold off
xlabel('x')
ylabel('y')
title('trayectorias')
Referencias
Xiaosun Wang. Trajectory of a projectile on a frictional inclined plane. Am. J. Phys. 82 (8) August 2014, pp. 764-768