

Motor de corriente continua
Se produce una fem al girar las espiras en el campo magnético uniforme
La ecuación del circuito es
La función sgn (signo de sinθ) describe el conmutador del motor de corriente continua. La fem inducida Vε se opone, véase la página titulada Autoinducción. Circuito R-L el apartado Ecuación del circuito
Para simplificar las ecuaciones, supondremos que el coeficiente de autoinducción L de las espiras es muy pequeño, por lo que podremos despreciar el término, Ldi/dt
La ecuación de la dinámica de rotación es
Sustituimos la intensidad i de la ecuación del circuito
Definimos un tiempo τ y dos parámetros β y γ. Para expresar la ecuación diferencial de forma más simple
Resolvemos la ecuación diferencial por el procedimiento
Para γ=0.8 y β=0
El ángulo girado θ crece sin límite
Representamos la velocidad angular de las espiras, dθ/dτ en función del tiempo τ
gamma=0.8;
beta=0;
f=@(t,x) [x(2); abs(sin(x(1)))-gamma*x(2)*sin(x(1))^2-beta];
[t,x]=ode45(f,[0,100],[pi/2,0]);
plot(t,x(:,2))
grid on
xlabel('\tau')
ylabel('d\theta/d\tau');
title('Motor de corriente continua')
La fem inducida estabiliza la velocidad angular de rotación dθ/dτ. Compárese con la figura al final de la página titulada Fuerza y momento sobre una espira
Para γ=10 y β=0
Representamos la velocidad angular de las espiras, dθ/dτ en función del tiempo τ
Las fluctuaciones en la velocidad angular dθ/dτ, se incrementan con γ
Para γ=0.8 y β≠0
Representamos la velocidad angular dθ/dτ en función del tiempo τ para y tres valores del momento externo β=0, 0.1, 0.2
gamma=0.8;
hold on
for beta=[0,0.1,0.2]
f=@(t,x) [x(2); abs(sin(x(1)))-gamma*x(2)*sin(x(1))^2-beta];
[t,x]=ode45(f,[0,100],[pi/2,0]);
plot(t,x(:,2))
end
hold off
grid on
xlabel('\tau')
ylabel('d\theta/d\tau');
title('Motor de corriente continua')
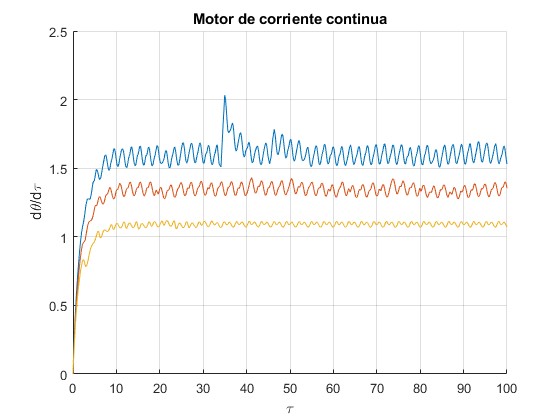
La velocidad angular final disminuye con β. Hay un valor crítico βc para el cual las espiras oscilan alrededor de una posición de equilibrio tal como se aprecia en las dos figuras más abajo
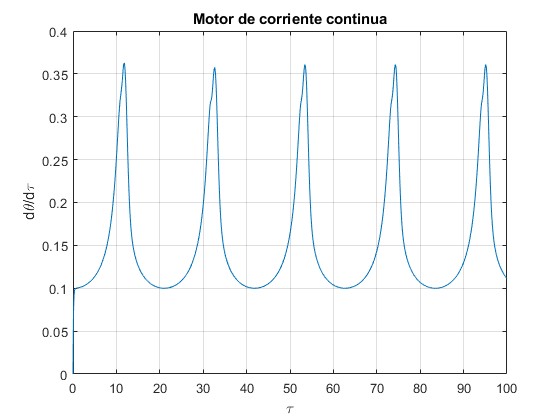
Para γ=0.4 y β=0.7
Representamos el ángulo girado por las espiras, θ en función del tiempo τ
gamma=0.4;
beta=0.7;
f=@(t,x) [x(2); abs(sin(x(1)))-gamma*x(2)*sin(x(1))^2-beta];
[t,x]=ode45(f,[0,100],[pi/2,0]);
plot(t,x(:,1))
grid on
xlabel('\tau')
ylabel('\theta');
title('Motor de corriente continua')
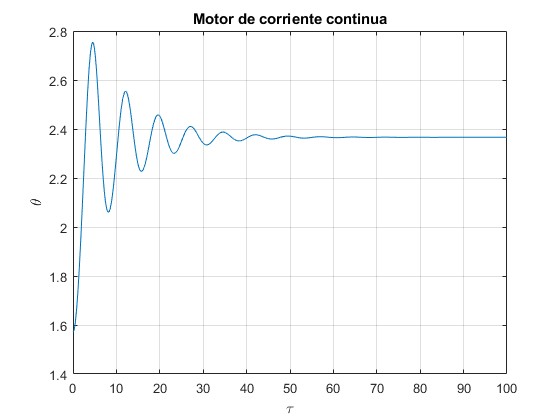
Las espiras oscilan alrededor de la posición de equilibrio estable
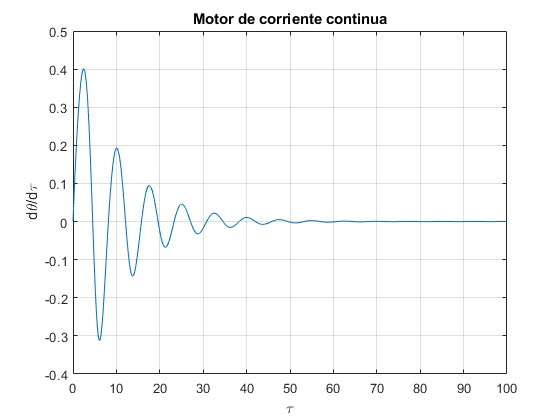
Representamos la velocidad angular de las espiras, dθ/dτ en función del tiempo τ
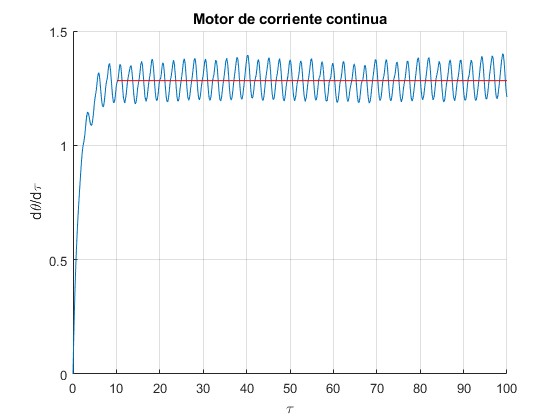
Estado estacionario
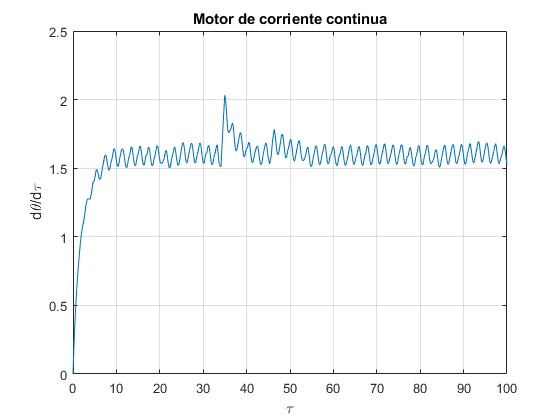
Representamos la velocidad angular dθ/dτ en función del tiempo τ para γ=1.0 y β=0
gamma=1.0;
beta=0;
f=@(t,x) [x(2); abs(sin(x(1)))-gamma*x(2)*sin(x(1))^2-beta];
[t,x]=ode45(f,[0,100],[pi/2,0]);
plot(t,x(:,2))
grid on
xlabel('\tau')
ylabel('d\theta/d\tau');
title('Motor de corriente continua')
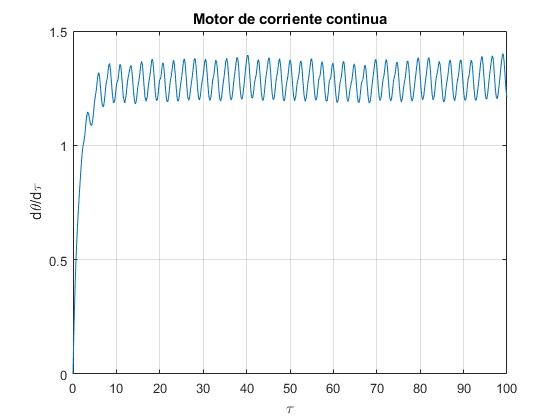
Partimos del hecho de que la velocidad angular media en el estado estacionario ωT es mucho mayor que la amplitud de las oscilaciones (como se vé en la figura). Esta situación no siempre se produce si γ es grande.
Observamos que la velocidad angular oscila alrededor de un valor constante ωT a partir del tiempo τ≈10. Calculamos el valor medio
Obtenemos el valor numérico de la integral, (área bajo la curva) tal como se explica en la página titulada Integración numérica y hallamos el valor medio que denominamos ωT y lo representamos mediante un segmento de color rojo
gamma=1.0;
beta=0;
f=@(t,x) [x(2); abs(sin(x(1)))-gamma*x(2)*sin(x(1))^2-beta];
[t,x]=ode45(f,[0,100],[pi/2,0]);
plot(t,x(:,2))
idx=find(t>10); %se toman las velocidades para tiempos mayores que 10
tt=t(idx);
v=x(idx,2);
suma=0; %valor medio
for k=2:length(tt)
suma=suma+(tt(k)-tt(k-1))*(v(k-1)+v(k))/2;
end
wT=suma/(t(end)-t(idx(1)));
line([tt(1),tt(end)],[wT,wT],'color','red')
grid on
xlabel('\tau')
ylabel('d\theta/d\tau');
title('Motor de corriente continua')
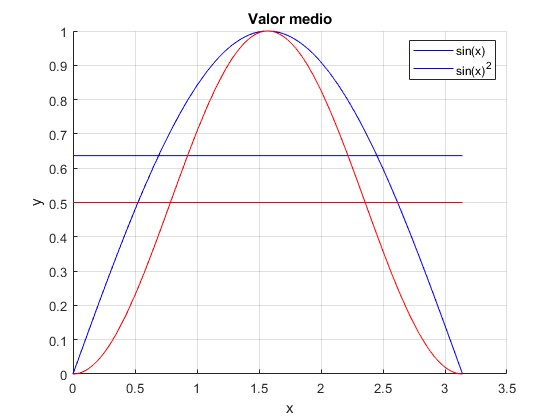
Valor medio de sin(x) y de sin2(x)
hold on
fplot(@(x) sin(x), [0,pi],'color','b')
line([0,pi],[2/pi,2/pi],'color','b')
fplot(@(x) sin(x).^2, [0,pi],'color','r')
line([0,pi],[1/2,1/2],'color','r')
grid on
xlabel('x')
ylabel('y')
legend('sin(x)','sin(x)^2', 'location', 'best')
title('Valor medio')
Escribimos la ecuación de la dinámica de rotación y tomamos valores medios, como el valor medio de la velocidad angular de rotación ωT es constante, el valor medio de la aceleración <d2θ/dt2>≈0. Relacionamos el momento externo (carga) Mext y la velocidad angular media en el estado estacionario ωT
Cuando el motor no soporta carga alguna, Mext=0
La velocidad angular media ωT se hace nula (las espiras oscilan alrededor de una posición de equilibrio estable) para el momento externo Mext
En términos del parámetro β
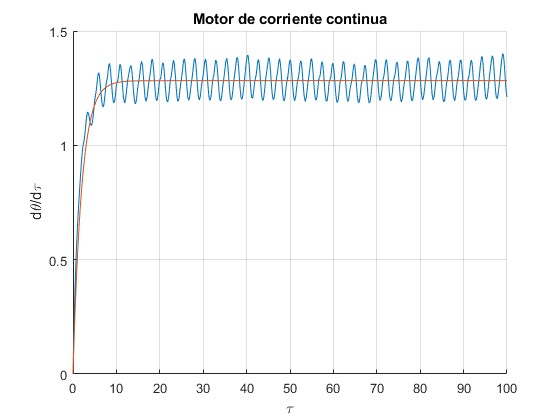
Desde el estado inicial al estado estacionario
Vamos a estudiar cómo evoluciona la velocidad angular media ω desde el estado incial hasta el estado estacionario caracterizado por una velocidad angular media ωT. En esta situación, el valor medio de la aceleración angular no es nulo <d2θ/dt2>≠0
Integramos, teniendo en cuenta que la velocidad angular inicial es cero
Representamos la velocidad angular dθ/dτ en función del tiempo τ y la funcion ω(τ) que hemos deducido
gamma=1.0;
beta=0;
f=@(t,x) [x(2); abs(sin(x(1)))-gamma*x(2)*sin(x(1))^2-beta];
[t,x]=ode45(f,[0,100],[pi/2,0]);
hold on
plot(t,x(:,2))
idx=find(t>10);
tt=t(idx);
v=x(idx,2);
suma=0; %valor medio
for k=2:length(tt)
suma=suma+(tt(k)-tt(k-1))*(v(k-1)+v(k))/2;
end
wT=suma/(t(end)-t(idx(1)));
fplot(@(t) wT*(1-exp(-gamma*t/2)),[0,100])
hold off
grid on
xlabel('\tau')
ylabel('d\theta/d\tau');
title('Motor de corriente continua')
Energía por unidad de tiempo. Potencia
Proporcionada por la batería
Disipada en la resistencia
Suministrada a los dispositivos externos (carga)
Cambio de energía cinética de rotación de las espiras, con el tiempo
Conservación de la energía, comprobamos que
Valores medios
Suministrada por la batería
Disipada en la resistencia
Suministrada a los dispositivos externos (carga)
Cambio de energía cinética de rotación de las espiras con el tiempo
En términos del parámetro β
En ausencia de carga Mext=0, la potencia media suministrada por la batería es independiente de los detalles del motor (espiras y campo magnético)
En términos del parámetro β
En el estado estacionario
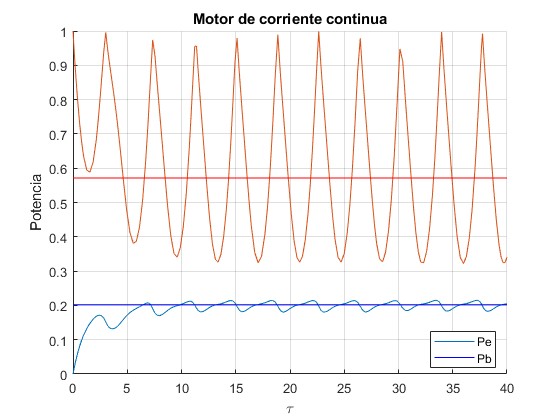
Comprobación
Representamos la potencia suministrada por la batería Pb y la proporcionada a los dispositivos externos Pe, para γ=0.8 y β=0.3. Las líneas horizontales representan los valores medios
gamma=0.8;
beta=0.3;
%V^2/R=1
f=@(t,x) [x(2); abs(sin(x(1)))-gamma*x(2)*sin(x(1))^2-beta];
[t,x]=ode45(f,[0,40],[pi/2,0]);
hold on
Pe=beta*gamma*x(:,2); %externa
plot(t,Pe)
Pe_media=4*beta/pi-2*beta^2;
line([0,40],[Pe_media,Pe_media],'color','b')
Pb=1-gamma*abs(sin(x(:,1))).*x(:,2);
plot(t,Pb)
Pb_media=1-8/pi^2+4*beta/pi;
line([0,40],[Pb_media,Pb_media],'color','r')
disp(Pe_media/Pb_media)
hold off
grid on
xlabel('\tau')
legend('Pe','Pb','location','best')
ylabel('Potencia');
title('Motor de corriente continua')
El rendimiento del motor de corriente continua es el cociente entre la potencia media suministrada a los dispositivos externos <Pe> y la suministrada por la batería <Pb>
0.3535
Representamos el rendimiento η en función de β en el intervalo 0≤β≤βm, es decir, 0≤β≤2/π
f=@(x) (4*x/pi-2*x.^2)./(1-8/pi^2+4*x/pi);
hold on
fplot(f,[0,2/pi])
x1=2/pi-(pi-sqrt(pi^2-8))/4;
max=(pi-sqrt(pi^2-8))^2/8;
line([x1,x1],[0,max],'lineStyle','--')
hold off
disp([x1,f(x1)])
grid on
ylim([0,0.4])
xlabel('\beta')
ylabel('\eta')
title('Rendimiento')
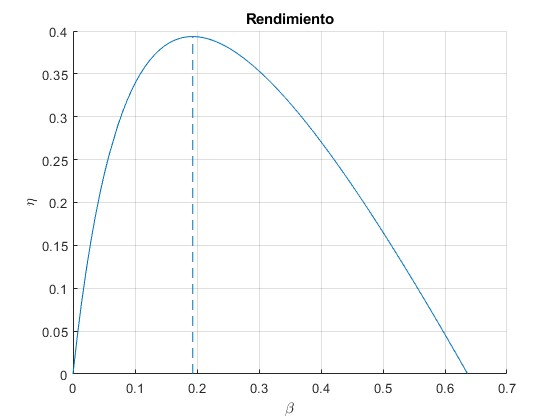
0.1931 0.3935
Presenta un máximo para β=0.19 y su valor es η=0.39
Referencias
Enrique F Moreno. Numerical investigation of the DC electric motor. Eur. J. Phys. 39 (2018) 055203