

Cañón electromagnético
El cañón electromagnético consta de un banco de condensadores de capacidad C, inicialmente cargado con q0. Se conectan a dos vías paralelas de aluminio de 4 m de longitud y r=1 cm de radio, separadas b=10 cm.
Se coloca una varilla deslizante de masa m=10 kg sobre las vías cerrando el circuito. La intensidad que circula por las vías produce un campo magnético perpendicular al plano del dispositivo. Este campo ejerce una fuerza sobre la corriente que pasa por la varilla, adquiriendo una velocidad muy elevada en décimas de segundo, como veremos en los cálculos al final de la página.
Ecuación del movimiento
El campo magnético producido por un segmento rectilíneo de corriente, se ha calculado en la página titulada, Campo magnético producido por una corriente rectilínea indefinida
cuya dirección es perpendicular al plano que contiene la corriente y el punto y cuyo sentido se determina aplicando la regla de la mano derecha.
Los campos magnéticos producidos por los segmentos rectilíneos de corriente horizontales sobre un punto (x,y) de la varilla deslizante (θ2=90°), marcado en color rojo, son
Ambos tienen la misma dirección y sentido, B(y)=B1+B2.
Fuerza sobre la varilla deslizante
La fuerza que ejerce este campo sobre una porción diferencial dy de la corriente en la varilla deslizante, es
Su dirección es el eje X y sentido hacia la derecha, (véase la primera figura). La fuerza total sobre la varilla deslizante es
Siendo r el radio de las vías
Para resolver la integral, hacemos el cambio, y=xsinh(t)
Teniendo en cuenta las relaciones
obtenemos
Nos queda por calcular el segundo término de la expresión de la fuerza. Hacemos el cambio de variable u=b-y, du=-dy, una integral similar al anterior
La expresión de la fuerza sobre la varilla deslizante es
La ecuación del movimiento es
Ecuación del circuito
El circuito está formado por un condensador de capacidad C, con una carga inicial q0, una resistencia (las vías, la varilla deslizante y los cables de conexión) y una autoinducción, (la espira rectangular).
La resistencia es variable, ya que la longitud x de la espira rectangular aumenta
donde σ es la conductividad del material, 2x+b es la longitud del circuito (no se tiene en cuenta los cables de conexión al condensador) y r es el radio de las vías
En la página titulada Coeficiente de autoinducción hemos deducido la fórmula de la autoinducción de una espira rectangular de lados a y b. Supondremos que nuestro circuito es una espira rectangular de lados x y b
En la autoinducción, el flujo propio es Φ=Li. La fem es
donde el coeficiente de autoinducción L y la intensidad i cambian con el tiempo.
La ecuación del circuito es,
La corriente i extrae carga de la placa positiva por lo que i=-dq/dt
La ecuación diferencial es
Cuando el coeficiente de autoinducción L=0, obtenemos la ecuación de la descarga de un condensador a través de una resistencia
- Cuando la resistencia R=0, y el coeficiente de autoinducción L es constante, obtenemos la ecuación de las oscilaciones eléctricas. Cuando R≠0, obtenemos la ecuación diferencial de las oscilaciones eléctricas amortiguadas
Solución numérica
La ecuación del movimiento y la ecuación del circuito, contituyen un sistema de dos ecuaciones diferneciales de segundo orden que se resuelven por procedimientos numéricos con las siguientes condiciones iniciales: en el instante t=0, x=0, v=0, (la varilla deslizante parte del origen en reposo). El condensador está cargado q=q0 y la intensidad de la corriente en el circuito i=-dq/dt es nula
Nos queda por calcular la expresión de la derivada del coeficiente de autoinducción, dL/dx
El último término, contiene x en el denominador y el primero, contiene ln(x). Si la posición inicial de varilla deslizante fuera x=0, se produciría un ln(0) y una división entre cero. Para evitarlo, cambiaremos la posición inicial de la varilla a x0>0
Ejemplo
- Masa de la varilla deslizante, m=10 kg
- Longitud de las vías, 4 m
- Radio de las vías, r= 1 cm
- Distancia entre las dos vías paralelas, b=10 cm
- Las vías son de aluminio de conductividad σ=37.8·106 S/m
- La capacidad del banco de condensadores, C=1500 F
- Diferencia de potencial inicial, V0=875 V
El procedimiento numérico ode45 se detiene cuando la posición de la varilla deslizante es 4.1 m. Como parte de x0=0.1 m, se desplaza 4 m. Par ello definimos la función stop_railgun que pasamos al procedimiento ode45
function [value,isterminal,direction]=stop_railgun(t,x, a)
value=x(1)-a;
isterminal=1;
direction=1;
end
El código completo del script es
m=10; %masa
C=1500; %capacidad
q0=875*C; %carga inicial
sigma=37.8e6; %conductividad del aluminio
b=0.1; %separación raíles paralelos
r=0.01; %radio de los raíles
%resistencia, autoinducción, derivada de L
R=@(x) (2*x+b)/(sigma*pi*r^2);
L=@(x) 4e-7*(-2*(x+b)+2*sqrt(x^2+b^2)-b*log((b+sqrt(b^2+x^2))/x)
-x*log((x+sqrt(b^2+x^2))/b)+b*log(2*b/r)+x*log(2*x/r));
dL=@(x) 4e-7*(log(2*x/r)-1-log((x+sqrt(x^2+b^2))/b)+sqrt(x^2+b^2)/x);
%x(1) es x, x(2) es dx/dt, x(3) es q, x(4) es dq/dt
opts=odeset('events',@(t,x) stop_railgun(t,x,4.1)); %Posición final
fg=@(t,x)[x(2);1e-7*x(4)^2*log((sqrt(x(1)^2+(b-r)^2)-x(1))*
(sqrt(x(1)^2+r^2)+x(1))/((sqrt(x(1)^2+(b-r)^2)+x(1))*
(sqrt(x(1)^2+r^2)-x(1))))/m ; x(4);-x(3)/(C*L(x(1)))-
x(4)*(R(x(1))+dL(x(1))*x(2))/L(x(1))];
[t,x]=ode45(fg,[0,0.1],[0.2,0,q0,0], opts);
plot(t,x(:,1)) %posición
grid on
xlabel('t')
ylabel('x')
title('Proyectil electromagnético. Posición')
Posición en función del tiempo
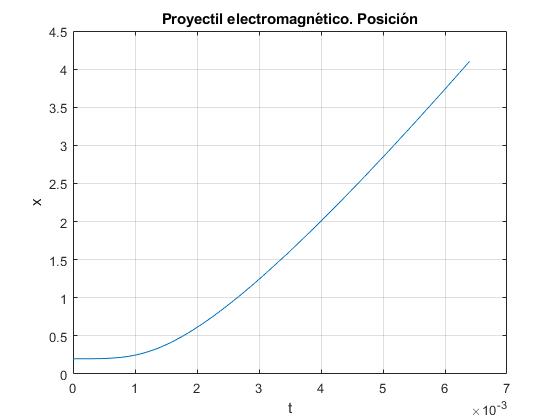
La varilla deslizante recorre 4 m en 6.4 ms
>> t(end) ans = 0.0064
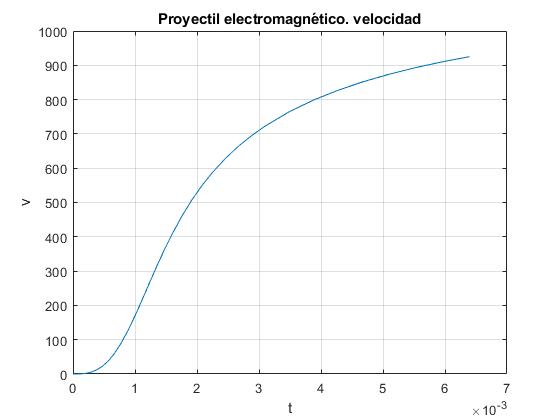
Velocidad en función del tiempo
Cambiamos la sentencia plot para representar la velocidad en función del tiempo
...
plot(t,x(:,2)) %velocidad
grid on
xlabel('t')
ylabel('v')
title('Proyectil electromagnético. velocidad')
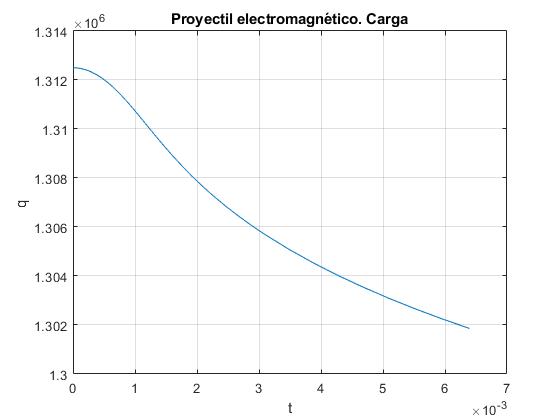
Carga del condensador en función del tiempo
Cambiamos la sentencia plot para representar la carga del condensador en función del tiempo
...
plot(t,x(:,3)) %carga
grid on
xlabel('t')
ylabel('q')
title('Proyectil electromagnético. Carga')
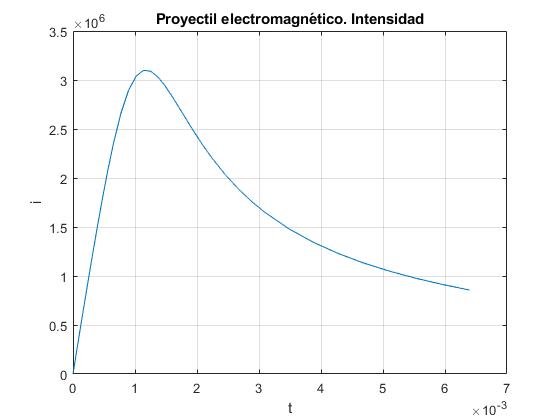
Intensidad de la corriente en función del tiempo
Cambiamos la sentencia plot para representar la intensidad i=-dq/dt de la corriente en función del tiempo
...
plot(t,-x(:,4)) %intensidad
grid on
xlabel('t')
ylabel('i')
title('Proyectil electromagnético. Intensidad')
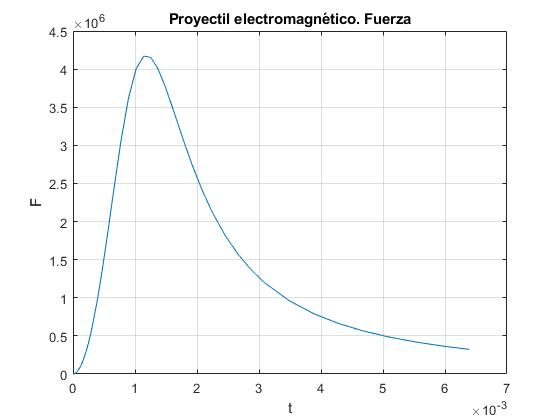
Fuerza en función del tiempo
Modificamos el script para representar la fuerza en función del tiempo
...
[t,x]=ode45(fg,[0,0.1],[0.2,0,q0,0], opts);
%x es posición, y es intensidad
F=@(x,y) 1e-7*(y.^2).*log(((sqrt(x.^2+(b-r)^2)-x).*(sqrt(x.^2+r^2)+x)).
/((sqrt(x.^2+(b-r)^2)+x).*(sqrt(x.^2+r^2)-x)));
FF=F(x(:,1),x(:,4));
plot(t,FF)
grid on
xlabel('t')
ylabel('F')
title('Proyectil electromagnético. Fuerza')
Referencias
Gabriel I. Font, Anthony N. Dills. Analyzing Railguns with Excel: Simple Numerical Integration for the Classroom. The Physics Teacher, Vol 56, October 2018, pp. 436-440