

El oscilador desplazado
Consideremos una partícula de masa m que se mueve en el potencial
Representamos la energía potencial Ep(x) para x0=-2 (x0<0) y k=1
x0=-2;
k=1;
hold on
fplot(@(x) k*(x+x0).^2/2, [0,5])
fplot(@(x) k*(x-x0).^2/2, [-5,0])
hold off
grid on
xlabel('x')
ylabel('E_p(x)')
title('Energía potencial')
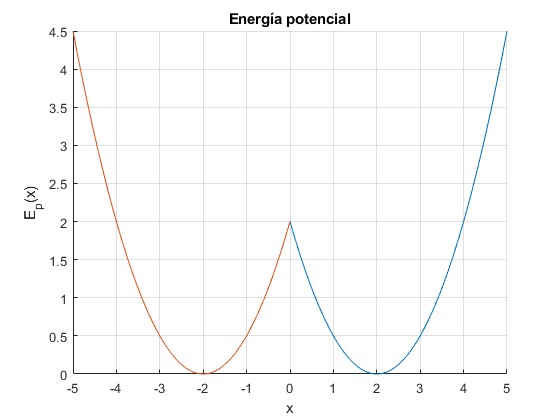
Hay dos mínimos en x=2 y x=-2, separados por un máximo local en x=0. La función Ep(x) es continua en x=0 pero no su derivada
Amplitud y periodo
Representamos la energía potencial Ep(x) para x0=2 (x0>0) y k=1
x0=2;
k=1;
E=15; %energía
a=sqrt(2*E/k)-x0; %amplitud
hold on
fplot(@(x) k*(x+x0).^2/2, [0,5])
fplot(@(x) k*(x-x0).^2/2, [-5,0])
line([-a,a],[E,E])
line([a,a],[0,E],'lineStyle','--')
line([-a,-a],[0,E],'lineStyle','--')
hold off
grid on
xlabel('x')
ylabel('E_p(x)')
title('Energía potencial')
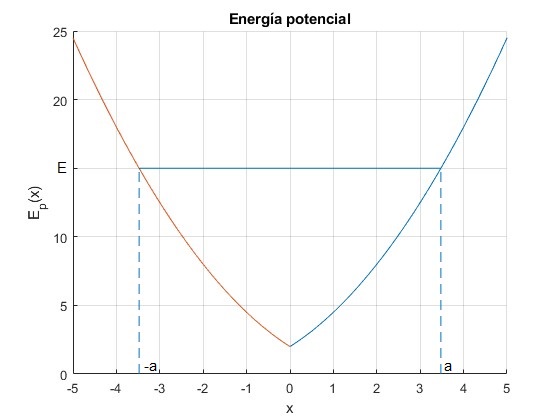
El mínimo de la función Ep(x) está en x=0,
La función es continua pero no lo es su derivada. Este es el caso (x0>0), que vamos a estudiar a continuación
Dada la energía E de la partícula calculamos su máximo desplazamiento a, sabiendo que la velocidad de la partícula v=0, para x=a
El principio de conservación de la energía es
En la posición de máximo desplazamiento x=a
>> a a = 3.4772
Cuando pasa por el mínimo x=0, el módulo de la velocidad de la partícula es
El periodo P es cuatro veces el tiempo que tarda la partícula en desplazarse de x=0 hasta x=a
Agrupamos términos bajo la raíz, para obtener una integral inmediata
Hacemos un cambio de variable
El resultado es el periodo P
Ecuación del movimiento
La fuerza sobre la partícula es
Resolveremos las ecuaciones diferenciales del movimiento
A la derecha del origen, x≥0
A la izquierda del origen, x<0
La solución particular es una constante C que introducimos en la ecuación diferencial
La solución completa es la suma de la particular y la homogénea
Las condiciones iniciales (posición inicial y velocidad inicial) determinan los coeficientes A1 y B1
La solución particular es una constante C que introducimos en la ecuación diferencial
La solución completa es la suma de la particular y la homogénea
Las condiciones iniciales (posición inicial y velocidad inicial) determinan los coeficientes A2 y B2
Etapas del movimiento
Primera etapa, de x=a a x=0
Segunda etapa, de x=0 a x=-a
Tercera etapa, de x=-a a x=0
Cuarta etapa, de x=0 a x=a
En el instante t=0, la partícula se encuentra en x=a, (máximo desplazamiento), en reposo, dx/dt=0

Los coeficientes A1 y B1 son
La solución de la ecuación diferencial para x≥0 es
La partícula llega al origen x=0, en el instante T tal que
Por simetría, el periodo es cuatro veces el tiempo T
La expresión del periodo P no parece el mismo que el obtenido al principio de esta página, sin embargo, el resultado es el mismo
>> x0=2; >> k=1; >> E=15; %energía >> a=sqrt(2*E/k)-x0; %amplitud >> P1=4*acos(x0/(x0+a)) P1 = 4.7880 >> P2=4*(pi/2-asin(x0/(x0+a))); P2 = 4.7880

En el instante t=0, la partícula se encuentra en x=0, y su velocidad es
Los coeficientes A2 y B2 son
La solución de la ecuación diferencial para x<0 es
La partícula, llega a x=-a en el instante T con velocidad nula
El mismo resultado que hemos obtenido en la primera etapa
En el instante t=0, la partícula se encuentra en x=-a, en reposo, dx/dt=0

Los coeficientes A2 y B2 son
La solución de la ecuación diferencial para x<0 es
En el instante t=0, la partícula se encuentra en x=0, y su velocidad es

Los coeficientes A1 y B1 son
La solución de la ecuación diferencial para x≥0 es
Hemos obtenido las ecuaciones del movimiento a partir de tiempos parciales, tomando t=0, al principio de cada etapa. Las ecuaciones del movimiento de la partícula tomando t=0, al principio de la primera etapa son
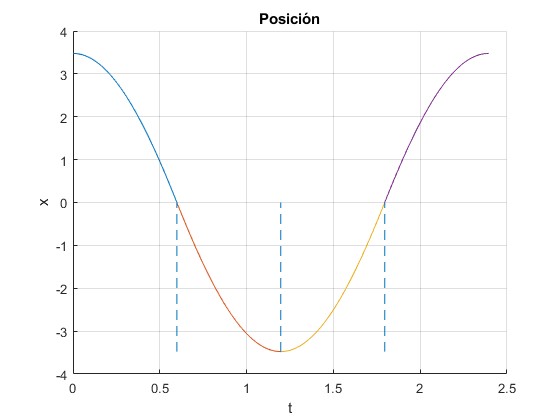
Posición
- Desplazamiento, x0=2
- Constante, k=1
- Energía de la partícula, E=15
- Frecuencia angular, ω0=2
T es el tiempo que emplea la partícula en cada etapa y P=4T es el periodo
Representamos la posición de la partícula en función del tiempo durante un periodo P, con los siguientes datos:
x0=2;
k=1;
E=15; %energía
a=sqrt(2*E/k)-x0; %amplitud
w0=2;%frecuencia angular, sqrt(k/m)
T=acos(x0/(a+x0))/w0;
hold on
x1=@(t) (a+x0)*cos(w0*t)-x0;
fplot(x1,[0,T])
x2=@(t) -x0*cos(w0*(t-T))-sqrt(a*(a+2*x0))*sin(w0*(t-T))+x0;
fplot(x2,[T,2*T])
x3=@(t) -(a+x0)*cos(w0*(t-2*T))+x0;
fplot(x3,[2*T,3*T])
x4=@(t) x0*cos(w0*(t-3*T))+sqrt(a*(a+2*x0))*sin(w0*(t-3*T))-x0;
fplot(x4,[3*T,4*T])
line([T,T],[-a,0],'lineStyle','--')
line([2*T,2*T],[-a,0],'lineStyle','--')
line([3*T,3*T],[-a,0],'lineStyle','--')
hold off
grid on
xlabel('t')
ylabel('x')
title('Posición')
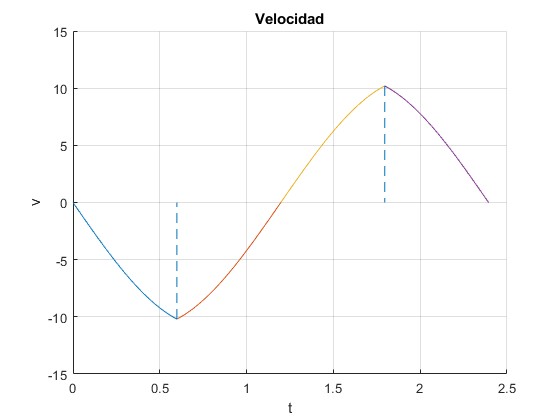
Velocidad
Representamos la velocidad de la partícula en función del tiempo durante un periodo P, con los mismos datos
x0=2;
k=1;
E=15; %energía
a=sqrt(2*E/k)-x0; %amplitud
w0=2;%frecuencia angular, sqrt(k/m)
T=acos(x0/(a+x0))/w0;
hold on
v1=@(t) -w0*(a+x0)*sin(w0*t);
fplot(v1,[0,T])
v2=@(t) w0*(x0*sin(w0*(t-T))-sqrt(a*(a+2*x0))*cos(w0*(t-T)));
fplot(v2,[T,2*T])
v3=@(t) w0*(a+x0)*sin(w0*(t-2*T));
fplot(v3,[2*T,3*T])
v4=@(t) w0*(-x0*sin(w0*(t-3*T))+sqrt(a*(a+2*x0))*cos(w0*(t-3*T)));
fplot(v4,[3*T,4*T])
line([T,T],[v1(T),0],'lineStyle','--')
line([3*T,3*T],[v3(3*T),0],'lineStyle','--')
hold off
grid on
xlabel('t')
ylabel('v')
title('Velocidad')
Referencias
John S. Thomsen. A benevolent nonlinear system: The dynamically shifted oscillator. Am. J. Phys. 56 (2) February 1988, pp. 123-128