

Péndulo de longitud variable
Sea una partícula de masa m unida a un hilo inextensible y de masa despreciable de longitud l cuyo extremo cuelga del centro de suspensión O.
Cuando la partícula se desplaza un ángulo θ, las fuerzas que actúan sobre la partícula son:
- el peso, mg
- la tensión T de la cuerda
La velocidad en coordenadas polares es
La aceleración en coordenadas polares es
Siendo la distancia radial r la longitud l variable del péndulo. Las ecuaciones del movimiento son
La segunda es la ecuación diferencial del movimiento
La longitud del péndulo aumenta linealmente con el tiempo
Si la longitud de la cuerda varía con el tiempo de la forma l=l0+αt, la ecuación del movimiento se escribe, haciendo la sustitución
de la forma
Cuando la amplitud de la oscilación es pequeña, sinθ≈θ
Se hace los cambios de variable
Haciendo operaciones
Llegamos a la ecuación de Bessel con n=1
La solución es
Derivamos respecto del tiempo, para obtener la velocidad angular dθ/dt
Utilizamos la relación entre las funciones de Bessel y sus derivadas
Partimos de la expresión θ(x)
El resultado es
Las condiciones iniciales son: t=0, θ=θ0, dθ/dt=0. En el instante inicial, cuando la longitud del péndulo es l0, se desvía un ángulo θ0 y se suelta. Calculamos los coeficientes A y B en el sistema de dos ecuaciones
Comprobamos que en el instante t=0, l=l0 y se cumple θ=θ0
Teniendo en cuenta la relación
Llegamos a una expresión más simplificada
Aproximaciones
Las funciones de Bessel se pueden aproximar a
Obtenemos una expresión más sencilla para la solución analítica
dado que l=l0+αt, la amplitud (coeficiente del coseno) es una función decreciente del tiempo.
Sea la longitud inicial del péndulo l0=1 m y α=0.1 m/s. Representamos la solución exacta y aproximada para una desviación inicial de θ0=0.3 rad (17°). Observamos que no se aprecia diferencia entre ambas
alfa=0.1; %velocidad de incremento de la longitud
l0=1; %longitud incial
th_0=0.3; %amplitud inicial
th=@(t) (pi*l0*sqrt(9.8./(l0+alfa*t))*th_0/alfa).*
(besselj(2,2*sqrt(9.8*l0)/alfa)*bessely(1,2*sqrt(9.8*(l0+alfa*t))/alfa)-
bessely(2,2*sqrt(9.8*l0)/alfa)*
besselj(1,2*sqrt(9.8*(l0+alfa*t))/alfa));
%aproximación
th_a=@(t) (l0./(l0+alfa*t)).^(3/4)*th_0.*cos(2*sqrt(9.8*l0)*(sqrt((l0+alfa*t)
/l0)-1)/alfa);
hold on
fplot(th,[0,50])
fplot(th_a,[0,50])
hold off
grid on
legend('exacta','aproximada')
xlabel('t')
ylabel('\theta')
title('Péndulo de longitud variable')
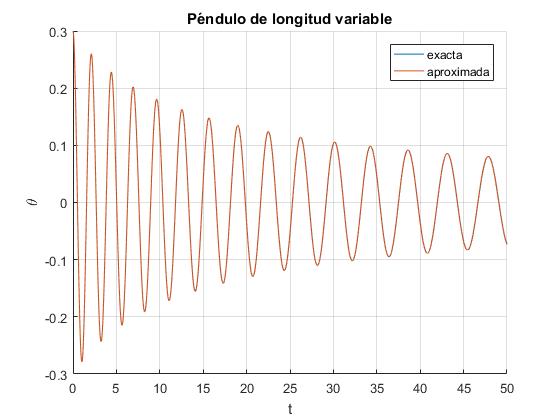
En este caso, la amplitud de la oscilación se va haciendo cada vez más pequeña
Periodo
Como vemos en la gráfica, el periodo tampoco es constante, aumenta con el tiempo
El péndulo pasa por la posición vertical de equilibrio cuando el coseno es cero, es decir cuando su argumento es π/2, 3π/2, 5π/2, etc.
El instante t1 en la figura se calcula cuando n=1, el instante t2 cuando n=2, el instante t3, cuando n=3 y así, sucesivamente.
Elevando al cuadrado, despejamos tn
El tiempo que tarda el péndulo en pasar dos veces consecutivas por el origen es medio periodo, intervalo de tiempo marcado en color rojo en la figura. Así, P1=t2-t1, P2=t4-t3, P3=t6-t5 y así, sucesivamente
Pn es una función lineal de n, (el número de oscilación), de pendiente π2α/g
Procedimientos numéricos
Cuando la amplitud es grande, resolvemos la ecuación diferencial
por procedimientos numéricos, con las condiciones iniciales: t=0, θ=θ0, dθ/dt=0. En el instante inicial, cuando la longitud del péndulo es l0, se desvía un ángulo θ0 y se suelta
alfa=0.1; %velocidad de incremento de la longitud
l0=1; %longitud incial
th_0=pi/3; %amplitud inicial
f=@(t,x) [x(2);-2*alfa*x(2)/(l0+alfa*t)-9.8*x(1)/(l0+alfa*t)];
opts=odeset('events',@pendulo_longitud_ode45);
[t,x,te,xe,ie]=ode45(f,[0,25],[th_0,0],opts);
hold on
plot(t,x(:,1),'r')
plot(te(ie==1),xe(ie==1),'o','markersize',4,'markerfacecolor','b')
hold off
grid on
xlabel('t')
ylabel('\theta');
title('Péndulo de longitud variable')
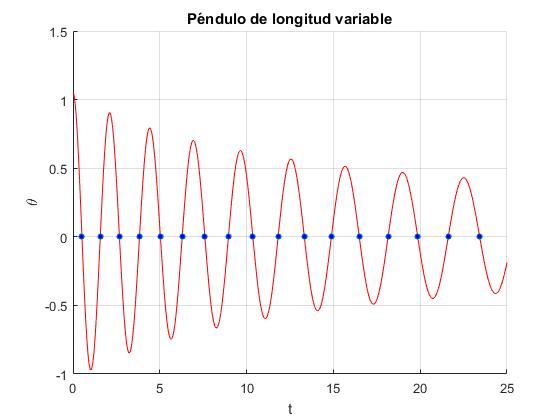
En la gráfica, marcamos los instantes t1,t2,t3,... en los que el péndulo pasa por la posición vertical de equilibrio θ=0, para ello definimos la función pendulo_longitud_ode45 que pasamos al procedimiento ode45
function [detect,stopin,direction]=pendulo_longitud_ode45(~,x)
detect=x(1);
stopin=0;
direction=0;
end
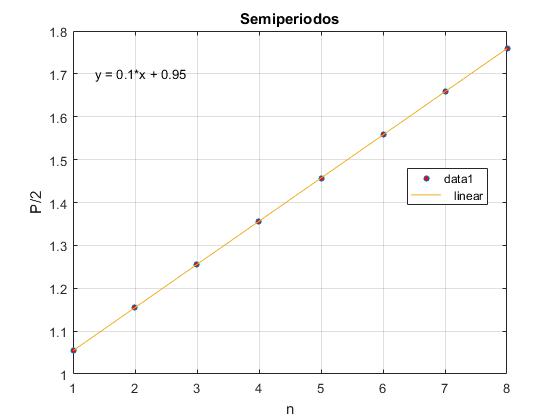
Completamos el script, representando los semiperiodos Pn=t2n-t2n-1 en el eje vertical y el número n de oscilación en el eje horizontal.
....
figure
N=floor(length(te)/2);
P=zeros(N,1);
for i=1:N
P(i)=te(2*i)-te(2*i-1);
end
plot(1:N,P, 'o','markersize',4,'markerfacecolor','r');
grid on
xlabel('n')
ylabel('P/2')
title('Semiperiodos')
En el menú seleccionamos Tools/Basic Fitting, aparece un cuadro de diálogo donde marcamos la casilla linear en Plot fits. A continuación, pulsamos la flecha hacia la derecha --> para mostrar los coeficientes p1 y p2 del polinomio (recta) y=p1*x+p2 de ajuste.
Observamos que los datos se ajustan a una línea recta de pendiente, 0.1. Con los datos α=0.1 y g=9.8, el valor de la pendiente es π2α/g=0.1
Energía
La energía en cualquier instante t (en coordenadas polares)
Actividades
Se introduce
- El parámetro α en el contro titulado Parámetro
- El péndulo se desvía un ángulo inicial θ0 en el control Angulo
- Se ha fijado la longitud inicial del péndulo l0= 1 m
Se pulsa el botón titulado Nuevo
Observamos la trayectoria de la partícula a medida que se incrementa la longitud del péndulo. En la parte superior derecha se proporcionan los datos de:
- El tiempo t
- La longitud del péndulo, l en dicho instante
- El ángulo θ de desviación del péndulo en grados. Observamos como disminuye la amplitud
- La velocidad tangencial l·dθ/dt de la partícula en dicho instante
El movimiento se detiene cuando la longitud del péndulo alcanza el valor de l=3 m
La longitud del péndulo aumenta exponencialmente con el tiempo
Cuando la longitud del péndulo aumenta exponencialmente con el tiempo, l=l0exp(αt), la ecuación diferencial, para pequeñas oscilaciones
admite una solución analítica en términos de las funciones de Bessel, como en el caso anterior
La ecuación diferencial se convierte en
Se hace el cambio de variable, τ=α·t
Se hace un nuevo cambio de variable
La ecuación diferencial se transforma en
Finalmente, hacemos el cambio de variable
La ecuación diferencial se transforma en
Llegamos a la ecuación de Bessel con n=2. La solución es
Derivamos respecto del tiempo, para obtener la velocidad angular dθ/dt
Hemos utilizado las propiedades de las funciones de Bessel
>> syms x; >> z=diff(besselj(2,x)*x^2) >> simplify(z) z =x^2*besselj(1, x) >> z=diff(bessely(2,x)*x^2); >> simplify(z) z=x^2*bessely(1, x)
La posicicón θ y la velocidad angular en función del tiempo τ se expresan
Las condiciones iniciales son: t=0, θ=θ0, dθ/dt=0. En el instante inicial, cuando la longitud del péndulo es l0, se desvía un ángulo θ0 y se suelta. Calculamos los coeficientes A y B en el sistema de dos ecuaciones
El resultado es
Teniendo en cuenta la relación
La expresión final en función del tiempo t
Aproximaciones
Las funciones de Bessel se pueden aproximar a
Obtenemos una expresión más sencilla para la solución analítica
Sea la longitud inicial del péndulo l0=1 m y α=0.1 m/s. Representamos la solución exacta y aproximada para una desviación inicial de θ0=0.3 rad (17°). Observamos que no se aprecia diferencia entre ambas
alfa=0.1; %velocidad de incremento de la longitud
l0=1; %longitud incial
w0=sqrt(9.8/l0)/alfa;
th_0=0.3; %amplitud inicial
th=@(t) th_0*pi*w0*exp(-alfa*t).*(bessely(1,2*w0)*
besselj(2,2*w0*exp(-alfa*t/2))-besselj(1,2*w0)*
bessely(2,2*w0*exp(-alfa*t/2)));
%aproximación
th_a=@(t) th_0*exp(-3*alfa*t/4).*cos(2*w0*(1-exp(-alfa*t/2)));
hold on
fplot(th,[0,50])
fplot(th_a,[0,50])
hold off
grid on
legend('exacta','aproximada')
xlabel('t')
ylabel('\theta')
title('Péndulo de longitud variable')

En este caso, la amplitud de la oscilación tiende rápidamente a cero.
Referencias
O. L. de Lange, J. Pierrus. Solved Problems in Classical Mechanics. Analytical and numerical solutions with comments. Oxford University Press (2010). Questions 6.18, pp. 151-156
Luis L. Sánchez-Soto, Jesús Zoido. Variations on the adiabatic invariance: The Lorentz pendulum. Am. J. Phys. 81 (1), January 2013. pp. 57-62
En este artículo se describe un dispositivo experimental
T. Wickramasinghe, R. Ochoa. Analysis of the linearity of half periods of the Lorentz pendulum. Am. J. Phys. 73 (5) May 2005, pp. 442-445