

Oscilaciones de un péndulo que cuelga de una plataforma horizontal apoyada en dos cilindros
En la figura, se muestra la situación inicial. Los dos cilindros iguales de masa mr y radio R, la plataforma horizontal de masa mp y la partícula de masa m unida a un hilo de longitud l, que cuelga de la plataforma. Se desvía la partícula un ángulo θ0 de la vertical y a continuación, se suelta. La posición inicial del punto de suspensión (en color rojo) está en el origen x=0. La plataforma tiene la suficiente longitud para no perder contacto con los cilindros mientras el péndulo oscila
En el instante t, la partícula está desviada un ángulo θ de la vertical, el punto de suspensión se ha desplazado x, moviéndose con velocidad v=dx/dt y las ruedas giran, con velocidad angular v/R.
Energía del sistema
La energía cinética del sistema se compone de tres términos:
Energía cinética de la plataforma de masa mp que se mueve con velocidad v=dx/dt
Energía cinética de los dos cilindros de masa mr y radio R, momento de inercia mrR2/2, que giran alrededor de su eje con velocidad angular v/R
Energía cinética de la partícula
La velocidad de la partícula ldθ/dt, es tangente a su trayectoria un arco de circunferencia de radio l, tal como se muestra en la figura. Pero el punto de suspensión se mueve con velocidad v=dx/dt. Las componentes de la velocidad de la partícula para el observador inercial son
La energía cinética de la partícula es
La energía potencial de la plataforma y de los cilindros no cambia. La energía potencial de la partícula es Ep=-mglcosθ, tomando la plataforma como nivel cero.
La energía total E=Ek1+Ek2+Ek3+Ep del sistema se conserva.
Ecuaciones del movimiento
La lagrangiana L=Ek1+Ek2+Ek3-Ep
Observamos que la lagrangiana L no depende de x
Una magnitud se mantiene constante
En el instante t=0, la plataforma está en reposo, dx/dt=0, el péndulo, se desvía θ0 de la vertical y se suelta, dθ/dt=0, por lo que la constante es cero
Cuando la plataforma se mueve hacia la derecha dx/dt>0, el péndulo se mueve hacia la izquierda dθ/dt<0 y viceversa
Se obtiene la segunda ecuación del movimiento
el resultado es
Derivamos la primera ecuación diferencial respecto del tiempo,
Entre estas dos últimas ecuaciones diferenciales, eliminamos d2x/dt2 y despejamos d2θ/dt2
Tenemos que resolver por procedimientos numéricos, el sistema de dos ecuaciones diferenciales
con las condiciones iniciales siguientes: en el instante t=0, θ=θ0, dθ/dt=0, x=0.
Nos damos cuenta, que tenemos por una parte la masa m de la partícula y por otra, la masa M=mp+mr (plataforma+cilindro)
La segunda ecuación nos relaciona el desplazamiento del punto de supensión x y el ángulo de desviación del péndulo θ
Integramos sabiendo que para θ=θ0, x=0
Por ejemplo, para l=1, m=1, M=2.5. Desviamos el péndulo θ0=π/6 (30°) y lo soltamos. Cuando su dirección es vertical θ=0, entonces la posición del punto de suspensión, x=0.14, tal como podemos apreciar en el programa interactivo, al final de la página
Aproximaciones
Cuando el ángulo de desviación θ es pequeño hacemos las siguientes aproximaciones, cosθ≈1 y sinθ≈θ, sin2θ≈0, θ·(dθ/dt)2≈0. La primera ecuación diferencial se convierte en
que es la ecuación diferencial de un Movimiento Armónico Simple de frecuencia angular ω y periodo P=2π/ω
La solución de esta ecuación diferencial con las condiciones iniciales especificadas: t=0, θ=θ0, dθ/dt=0, es
θ=θ0cos(ωt)
La segunda ecuación diferencial se escribe
Integramos esta ecuación, con la condición inicial, t=0, x=0
Solución numérica
Consideremos el sistema formado por
- Una partícula de masa m=1, que cuelga de un hilo de longitud l=1
- Masas del cilindro+plataforma, M=2.5
El péndulo se desvía un ángulo θ0=π/12 (15°) en el instante inicial t=0. Se representa el ángulo θ del péndulo en función del tiempo t y la posición del punto de suspensión x en función del tiempo
m=1; %masa partícula que oscila
M=2.5; %masas cilindro+plataforma
longitud=1; %longitud del péndulo
angulo=pi/12; %desviación inicial
w=sqrt((M+m)*9.8/(M*longitud)); %frecuencia angular
tFin=4*pi/w; %dos oscilaciones
%x(2) es vy, x(1) es y,
x0=[angulo,0,0]; %[y, vy, x]
fg=@(t,x) [x(2);(-(m+M)*9.8*sin(x(1))/longitud-m*sin(x(1))*cos(x(1))*x(2)^2)
/(M+m*sin(x(1))^2);-m*longitud*cos(x(1))*x(2)/(m+M)];
[t,x]=ode45(fg,[0,tFin],x0);
subplot(2,1,1)
hold on
plot(t, x(:,1))
fplot(@(t) angulo*cos(w*t),[0,tFin])
hold off
xlabel('t')
ylabel('\theta');
grid on
legend('exacto','aproximado','location','south')
title('Angulo del péndulo')
subplot(2,1,2)
hold on
plot(t, x(:,3))
fplot(@(t) m*longitud*angulo*(1-cos(w*t))/(m+M),[0,tFin])
hold off
xlabel('t')
ylabel('x');
legend('exacto','aproximado','location','north')
grid on
title('Posición plataforma')
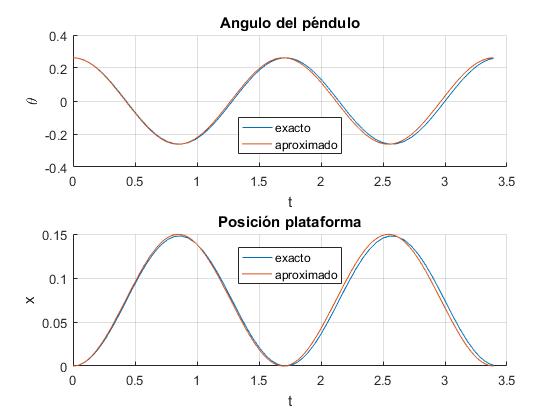
En la representación gráfica, vemos que cuando el ángulo de desviación θ0 es pequeño, la solución numérica de las ecuaciones del movimiento se ajusta a sus aproximaciones analíticas
Comprobamos el principio de conservación de la energía, la energía inicial es E=-mglcosθ0
>> -m*longitud*9.8*cos(pi/12) ans = -9.4661
Calculamos la energía en cada instante, la variable vx es dx/dt
>> vx=-m*longitud*cos(x(:,1)).*x(:,2)/(m+M); >> E=(m+M)*vx.^2/2+m*(longitud*x(:,2)).^2/2+m*longitud*x(:,2).*vx.*cos(x(:,1)) -m*9.8*longitud*cos(x(:,1)) E = -9.4661 -9.4661 -9.4661 ...... -9.4665
Periodo
La energía es constante e igual a la energía inicial
La lagrangiana L no depende de la variable x, por tanto, hay otra constante del movimiento
Despejamos dx/dt en la segunda ecuación y sustituimos en la primera. Despejamos dθ/dt
Integramos la variable θ entre 0 y θ0 para obtener un cuarto de periodo
La función integral de MATLAB calcula, empleando procedimientos numéricos, la integral definida
m=1; %masa partícula que oscila M=2.5*m; %masas cilindro+plataforma longitud=1; %longitud del péndulo angulo=pi/6; %desviación inicial f=@(x) sqrt((m*sin(x).^2+M)./(cos(x)-cos(angulo))); P=2*sqrt(2*longitud/(9.8*(m+M)))*integral(f,0, angulo); disp(P)
1.7693
Actividades
Se introduce
- La suma de las masas del cilindro y la plataforma M en el control titulado Masas plataforma+cilindro
- El ángulo inicial de desviación del péndulo θ0 en el control titulado Angulo inicial
- La masa de la partícula se ha fijado en m=1
- La longitud del péndulo se ha fijado en l=1
Se pulsa el botón titulado Nuevo
Observamos el movimiento del péndulo, la plataforma y los cilindros. Se proporciona los valores:
- El tiempo t
- La posición del punto de suspensión x
- El ángulo de desviación θ en grados, del péndulo respecto de la vertical
El lector puede medir el periodo de la oscilación utilizando los botones Pausa || y Paso a paso >|
El programa calcula en cada instante el tanto por ciento de error relativo en la energía o el cociente
donde E es la energía del sistema en cualquier instante t, y E0 es la energía inicial del sistema.
Este valor se proporciona en caracteres de color rojo en la parte inferior derecha. Su valor debe ser siempre cero, o un valor muy pequeño lo que indica que la energía del sistema permanece constante y el programa realiza los cálculos correctamente.