

El oscilador de “Atwood”
Equilibrio y estabilidad
El equilibrio se logra, cuando el momento del peso que cuelga respecto del eje de rotación del disco, es igual y de sentido contrario al momento de la masa adicional m pegada al disco a una distancia r de su eje. El desplazamiento angular de equilibrio θe de la masa puntual es
MgR=mgr·sinθe
La altura de equilibrio del bloque es he=R·θe
El ángulo θe existe si se cumple que MR≤mr
Energía potencial
Consideremos la situación cuando la masa adicional m se ha desplazado un ángulo θ, y el bloque de masa M ha descendido una altura h=R·θ (véase la primera figura)
Ep(θ)=mgr(1-cosθ)-MgR·θ.
Representamos la energía potencial en el intervalo (0, 3π) para los siguientes valores:
- La masa puntual sobre el disco, m=0.7 kg
- La masa del bloque que cuelga M=0.2 kg
- La distancia de la masa puntual pegada al disco al eje del disco, r=0.5 m
- El radio del disco, R=1 m
M=0.2; %bloque
m=0.7; %masa puntual sobre el disco
R=1; %radio del disco
r=0.5; %posición de la masa puntual
f=@(x) 9.8*(m*r*(1-cos(x))-M*R*x);
fplot(f,[0,3*pi])
set(gca,'XTick',0:pi/2:3*pi)
set(gca,'XTickLabel',{'0','\pi/2','\pi','3\pi/2','2\pi','5\pi/2','3\pi'})
grid on
xlabel('\theta')
ylabel('E_p')
title('Energía potencial')
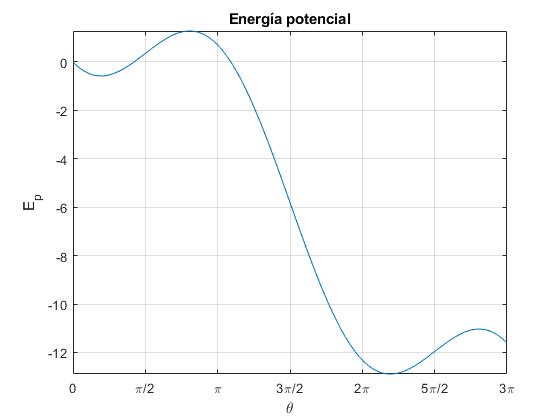
El intervalo (0,π), es la región de interés en la que vamos a analizar este sistema mecánico
Para MR<mr
- La masa puntual sobre el disco, m=0.5 kg
- La masa del bloque que cuelga, M=0.2 kg
- La distancia de la masa puntual pegada al disco al eje del disco, r=0.5 m
- El radio del disco, R=1 m
Representamos la energía potencial en el intervalo (0,π) para los siguientes valores:
M=0.2; %bloque
m=0.5; %masa puntual sobre el disco
R=1; %radio del disco
r=0.5; %distancia al eje de la masa puntual
f=@(x) 9.8*(m*r*(1-cos(x))-M*R*x);
fplot(f,[0,pi])
ylim([-1.2,0])
%máximo y mínimo
th=asin(M*R/(m*r));
line([th,th],[-1.2,f(th)], 'lineStyle','--','color','k')
line([pi-th,pi-th],[-1.2,f(pi-th)], 'lineStyle','--','color','k')
%movimientos
line([0,pi],[-0.4,-0.4], 'color','b')
g=@(x) f(x)+0.4;
ang=fzero(g,pi/8);
line([ang,ang],[-1.2,f(ang)],'lineStyle','--','color','b')
line([0,pi],[-0.6,-0.6], 'color','r')
g=@(x) f(x)+0.6;
ang=fzero(g,pi/8);
line([ang,ang],[-1.2,f(ang)],'lineStyle','--','color','r')
ang=fzero(g,pi/2);
line([ang,ang],[-1.2,f(ang)],'lineStyle','--','color','r')
set(gca,'XTick',0:pi/4:pi)
set(gca,'XTickLabel',{'0','\pi/4','\pi/2','3\pi/4','\pi'})
grid on
xlabel('\theta')
ylabel('E_p')
title('Energía potencial')
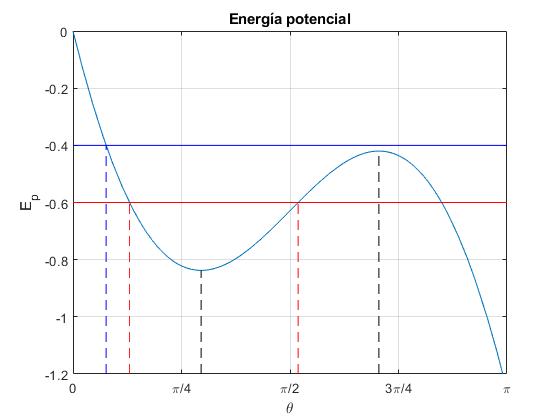
Calculamos sus extremos derivando la función energía potencial Ep(θ) respecto del ángulo θ, e igualando a cero.
hay dos posibles ángulos, θe y π-θe. Vamos a comprobar que al primero le corresponde un mínimo de la energía potencial, mientras que al segundo le corresponde un máximo. Hallamos la derivada segunda de la función energía potencial
El coseno es positivo (mínimo) para θe, y negativo (máximo) para π-θe. En la figura, vemos que la función Ep(θ) presenta un mínimo para θe=53°, y un máximo para 180- θe=127°. Líneas a trazos de color negro en la figura
Cuando la energía del sistema es E=-0.4 J, el dispositivo se puede mover desde la posición θ1=13.7°, (en color azul en la figura) raíz de la ecuación transcendente
E=mgr(1-cosθ)-MgR·θ
>> f=@(x) 9.8*(m*r*(1-cos(x))-M*R*x); >> g=@(x) f(x)+0.4; >> fzero(g,pi/8)*180/pi ans = 13.7436
Cuando la energía del sistema es E=-0.6 J, el dispositivo se puede mover desde la posición θ1=23.5°, hasta la posición θ2=93.3° (en color rojo en la figura) raíces de dicha ecuación transcendente
>> f=@(x) 9.8*(m*r*(1-cos(x))-M*R*x); >> g=@(x) f(x)+0.6; >> fzero(g,pi/8)*180/pi ans = 23.4595 >> fzero(g,pi/2)*180/pi ans = 93.3727
Para MR=mr
El máximo y el mínimo coinciden en θ=90° que es el punto de inflexión.
Para MR>mr
La función energía potencial es una función decreciente de θ.
M=0.3; %bloque
m=0.5; %masa puntual sobre el disco
R=1; %radio del disco
r=0.5; %distancia al eje de la masa puntual
f=@(x) 9.8*(m*r*(1-cos(x))-M*R*x);
fplot(f,[0,pi])
ylim([-4,0])
%movimientos
g=@(x) f(x)+0.6;
ang=fzero(g,pi/8);
line([ang,ang],[-4,f(ang)],'lineStyle','--','color','b')
line([0,pi],[-0.6,-0.6], 'color','r')
set(gca,'XTick',0:pi/4:pi)
set(gca,'XTickLabel',{'0','\pi/4','\pi/2','3\pi/4','\pi'})
grid on
xlabel('\theta')
ylabel('E_p')
title('Energía potencial')
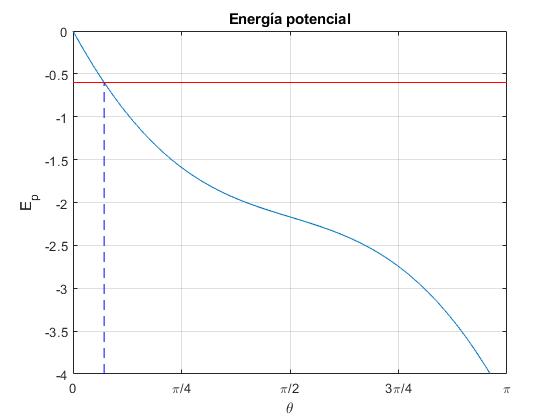
Una partícula cuya energía E=-0.6 J se mueve desde la posición angular θ1=13° en adelante
Hay dos posibles movimientos:
Se parte de una posición inicial θ1 en reposo y la posición θ crece indefinidamente. El bloque cae sin detenerse
Se parte de una posición inicial θ1 en reposo y se llega a una posición θ2 en reposo, el movimiento se repite entre estas dos posiciones alrededor de la posición de equilibrio θe
Ecuación del movimiento
En la figura, se muestran las fuerzas que actúan sobre el disco y las fuerzas que actúan sobre el bloque de masa M. El disco gira en el sentido indicado con aceleración angular α, y el bloque lleva una aceleración a. La relación entre ambas aceleraciones es a=α·R
-
Ecuación del movimiento del bloque
-
Ecuación del movimiento del disco y la masa puntual m
Mg-T=Ma
Iα=T·R-mgr·sinθ
El momento de inercia del disco de masa md y de la masa adicional m es
Eliminando la tensión T de la cuerda, llegamos a la ecuación diferencial del movimiento del disco
Se resuelve esta ecuación diferencial por procedimientos numéricos con las siguientes condiciones iniciales t=0, θ=θ1, dθ/dt=0. Dónde θ1 es la posición de partida que hemos calculado en el apartado anterior
Analizamos los dos posibles movimientos:
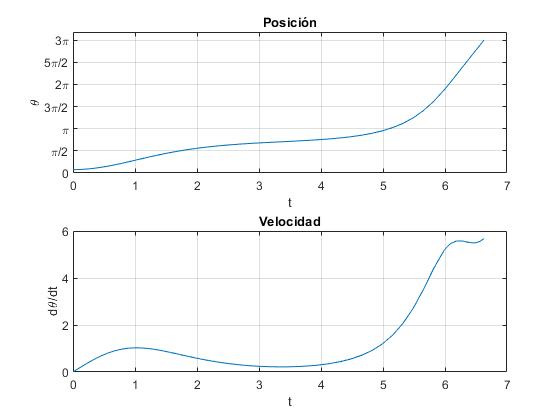
Se parte de una posición inicial θ1 en reposo y la posición θ crece indefinidamente. El bloque cae sin detenerse
Creamos la función
function [value,isterminal,direction]=stop_atwood(t,x)
%x(1) es x, x(3) es y
value=x(1)-3*pi;
isterminal=1; %1 detiene la integración cuando la velocidad se hace cero
direction=1; % 1 crece, -1 decrece, 0 no importa
end
Para la energía E=-0.4 J, calculamos la posición θ1 de partida en reposo y resolvemos la ecuación diferencial, representando la posición θ y la velocidad dθ/dt en función del tiempo t
M=0.2; %bloque
m=0.5; %masa puntual sobre el disco
R=1; %radio del disco
r=0.5; %distancia al eje de la masa puntual
md=1; %masa del disco
energia=-0.4;
%posición de partida en reposo
f=@(x) 9.8*(m*r*(1-cos(x))-M*R*x)-energia;
ang=fzero(f,pi/8);
%movimiento
f=@(t,x) [x(2); (M*9.8*R-m*9.8*r*sin(x(1)))/(md*R^2/2+m*r^2+M*R^2)];
opts=odeset('events',@stop_atwood);
[t,x]=ode45(f,[0,30],[ang,0], opts);
subplot(2,1,1)
plot(t,x(:,1))
set(gca,'YTick',0:pi/2:3*pi)
set(gca,'YTickLabel',{'0','\pi/2','\pi','3\pi/2','2\pi','5\pi/2','3\pi'})
grid on
xlabel('t')
ylabel('\theta');
title('Posición')
subplot(2,1,2)
plot(t,x(:,2))
grid on
xlabel('t')
ylabel('d\theta/dt');
title('Velocidad')
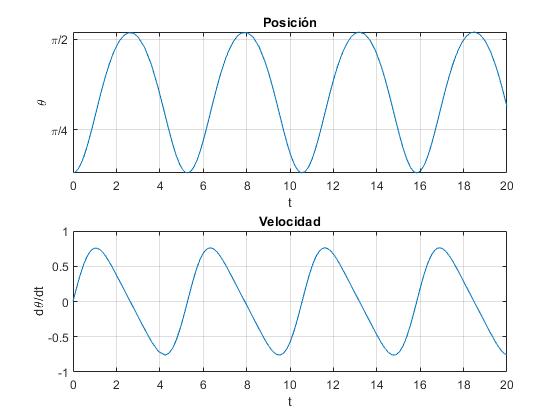
Se parte de una posición inicial θ1 en reposo y se llega a una posición θ2 en reposo, el movimiento se repite entre estas dos posiciones alrededor de la posición de equilibrio θe
Para la energía E=-0.6 J, calculamos la posición θ1 de partida en reposo y resolvemos la ecuación diferencial, representando la posición θ y la velocidad dθ/dt en función del tiempo t
M=0.2; %bloque
m=0.5; %masa puntual sobre el disco
R=1; %radio del disco
r=0.5; %distancia al eje de la masa puntual
md=1; %masa del disco
energia=-0.6;
%posición de partida en reposo
f=@(x) 9.8*(m*r*(1-cos(x))-M*R*x)-energia;
ang=fzero(f,pi/8);
%movimiento
f=@(t,x) [x(2); (M*9.8*R-m*9.8*r*sin(x(1)))/(md*R^2/2+m*r^2+M*R^2)];
[t,x]=ode45(f,[0,20],[ang,0]);
subplot(2,1,1)
plot(t,x(:,1))
set(gca,'YTick',0:pi/4:pi)
set(gca,'YTickLabel',{'0','\pi/4','\pi/2','3\pi/4','\pi'})
grid on
xlabel('t')
ylabel('\theta');
title('Posición')
subplot(2,1,2)
plot(t,x(:,2))
grid on
xlabel('t')
ylabel('d\theta/dt');
title('Velocidad')
Oscilaciones alrededor de la posición de equilibrio estable
Como caso particular, estudiamos las oscilaciones de pequeña amplitud, alrededor de la posición de equilibrio θe
Poniendo θ=θe+φ, en la ecuación diferencial
Desarrollando el seno de una suma, y aproximando sinφ≈φ, cosφ≈1
Que es la ecuación diferencial de un MAS de frecuencia angular
Ejemplo:
- Masa del disco, md=1 kg
- Masa puntual pegada al disco, m=0.3 kg
- Masa del bloque que cuelga, M=0.1 kg
- Radio del disco R=1 m
- Distancia de la masa puntual m al centro del disco, r=0.5 m
Ángulos máximo y mínimo
La función energía potencial presenta un mínimo para θe=41.8°, y un máximo para 180- θe=138.2°
>> asin(M*R/(m*r))*180/pi ans = 41.8103
El periodo de las oscilaciones de pequeña amplitud alrededor de la posición de equilibrio estable es
En el programa interactivo, el sistema parte del reposo desde la posición θ=0. La energía inicial es cero. Cuando se encuentra en la posición θ=60°=π/3, la energía potencial vale
Ep=0.3·9.8·0.5(1-cos(π/3))-0.1·9.8·1.0·(π/3)=-0.29 J
La energía cinética es la suma de la energía cinética de rotación del disco que se mueve con velocidad angular ω, y la energía cinética del bloque que se mueve con velocidad v. La relación entre ambas velocidades es v= ω·R
Aplicando el principio de conservación de la energía
Ek+Ep=0,
0.3375ω2-0.29=0, ω=0.93 rad/s
La energía potencial vuelve a ser cero en la posición
Ep(θ)=mgr(1-cosθ)-MgR·θ=0. El ángulo θ, se obtiene resolviendo la ecuación transcendente
mr(1-cosθ)-MR·θ=0
1.5(1-cosθ)-θ=0
La raíz es θ=1.71 rad=98°.
>> f=@(x) 9.8*(m*r*(1-cos(x))-M*R*x); >> fzero(f,pi/2)*180/pi ans = 98.1964
Sistemas análogos
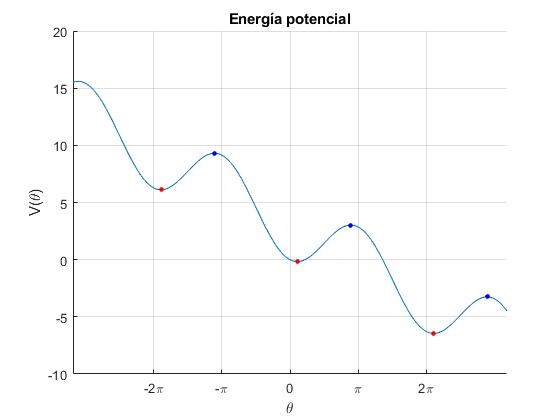
Escribiendo la energía potencial en forma V(θ) dependiente del parámetro adimensional A, describimos otros sistemas análogos, por ejemplo, el sistema magneto-mecánico consistente en un cilindro con un imán en su interior que rueda sin deslizar a la largo de un plano inclinado en en una región en la que existe un campo magnético uniforme cuya dirección es vertical
Calculamos los extremos de esta función
Son máximos cuando la derivada segunda es negativa y son mínimos cuando la derivada segunda es positiva. Llamando φ=arcsin(1/A), con A≥1.
- Los máximos se producen para θn=φ+2nπ
- Los mínimos para θn= π-φ+2nπ
En los extremos (máximos y mínimos) el momento neto que actúa sobre el sistema es cero. Estas son las posiciones de equilibrio: estable en los mínimos e inestable en los máximos.
A=3; %parámetro
f=@(x) A*(1-cos(x))-x;
hold on
fplot(f, [-10,10])
z=asin(1/A);
for n=-1:1
%mínimos
plot(z+n*2*pi,f(z+n*2*pi),'o','markersize',3,'markeredgecolor',
'r','markerfacecolor','r')
%máximos
plot(pi-z+n*2*pi,f(pi-z+n*2*pi),'o','markersize',3,'markeredgecolor',
'b','markerfacecolor','b')
end
hold off
grid on
set(gca,'XTick',-2*pi:pi:2*pi)
set(gca,'XTickLabel',{'-2\pi','-\pi','0','\pi','2\pi'})
xlabel('\theta')
ylabel('V(\theta)')
title('Energía potencial')
La representación gráfica de V(θ), nos permite describir cualitativamente el movimiento del sistema para una energía total ε dada.
El código para representar una parte de la figura es
function atwood_1
A=3; %parámetro
E=7; %energía
f=@(x) A*(1-cos(x))-x;
fm=@(x) f(x)-E;
x=linspace(-10,10,20);
r=raices(fm,x);
hold on
fplot(f, [-10,10])
line([-10,10],[E,E],'color','k');
%dibuja las raíces
ordenada=ones(1,length(r))*E;
plot(r, ordenada,'ro','markersize',4,'markerfacecolor','r')
hold off
%grid on
xlabel('\theta')
ylabel('V(\theta)')
title('Energía potencial')
function r = raices(f, x)
y=f(x);
indices=find(y(1:end-1).*y(2:end)<0);
r=zeros(1,length(indices));
for k=1:length(indices)
r(k)=fzero(f, [x(indices(k)), x(indices(k)+1)]);
end
end
end
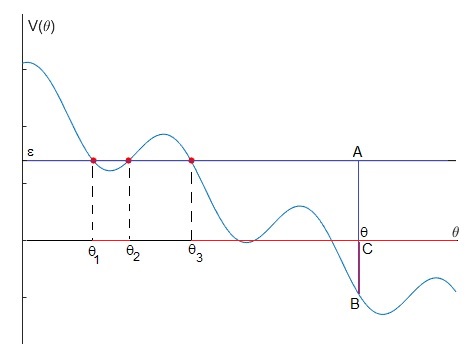
Como se aprecia en la figura, para la energía total ε hay dos regiones en las que se pueden mover el sistema, aquellas en las que su energía cinética es positiva o bien aquellas en las que la
energía total ε es mayor que la energía potencial V(θ). La
condición ε≥V(θ), se cumple para las posiciones angulares θ en el segmento θ1≤θ≤θ2 y para θ≥θ3 (señaladas en color rojo en la figura).
Siendo θ1, θ2 y θ3 las
raíces de la ecuación trascendente ε=V(θ) calculadas mediante la función
La posición inicial determina la región en la que se moverá posteriormente. Imaginemos que esta posición es θ>θ3, señalada en la figura. Su energía potencial es el segmento CB, la energía total es el segmento CA, luego la energía cinética es el segmento AB. El punto de intersección θ3 entre la recta y la curva de energía potencial, ε=V(θ) señala el punto de retorno, es decir, aquél en el que la velocidad es nula.
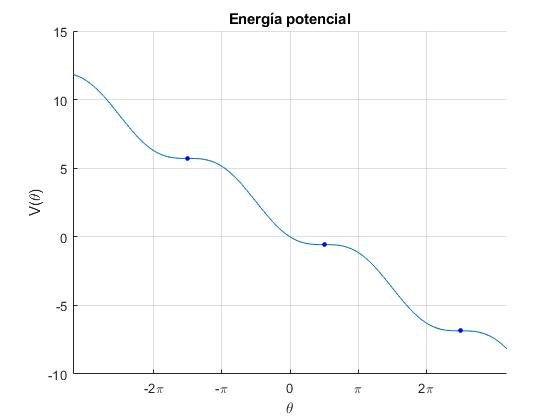
Cuando A=1, no hay máximos ni mínimos locales, son puntos de inflexión ya que la primera y segunda derivadas son nulas en dichos puntos. dV/dθ=0, y d2V/dθ2=0.
A=1;
f=@(x) A*(1-cos(x))-x;
hold on
fplot(f, [-10,10])
z=asin(1/A);
for n=-1:1
%mínimos
plot(z+n*2*pi,f(z+n*2*pi),'o','markersize',3,'markeredgecolor',
'r','markerfacecolor','r')
%máximos
plot(pi-z+n*2*pi,f(pi-z+n*2*pi),'o','markersize',3,'markeredgecolor',
'b','markerfacecolor','b')
end
hold off
grid on
set(gca,'XTick',-2*pi:pi:2*pi)
set(gca,'XTickLabel',{'-2\pi','-\pi','0','\pi','2\pi'})
xlabel('\theta')
ylabel('V(\theta)')
title('Energía potencial')
Ecuación del movimiento
Escribimos la ecuación diferencial del movimiento de la forma
Se resuelve la ecuación diferencial mediante el procedimiento numéricos con las condiciones iniciales θ=θ0 y dθ/dt=0 en el instante t=0, siendo θ0 un punto de retorno o una de las raíces de la ecuación trascendente ε=V(θ).
El comportamiento del sistema viene determinado por el parámetro A, ya que el parámetro C actúa de factor de escala.
-
Cuando A>1 se pueden dar dos comportamientos
Oscila entre dos posiciones angulares θ1≤θ≤θ2.
Se mueve sin límite, θ≥θ3
-
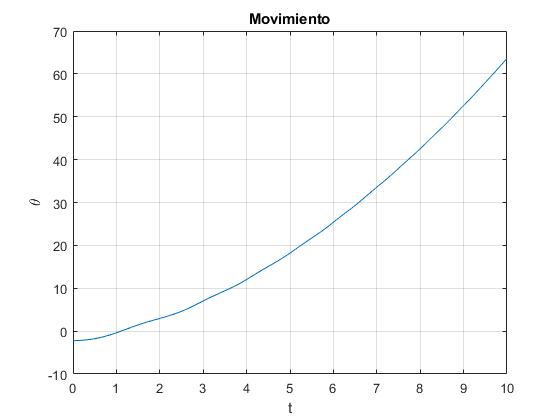
Para A≤1 el movimiento sin límite, θ≥θ3.
function atwood_3
A=3; %parámetro
E=7; %energía
f=@(x) A*(1-cos(x))-x;
fm=@(x) f(x)-E;
x=linspace(-10,10,20);
r=raices(fm,x);
x0=[r(1),0]; %posición inicial, cambiar a otro índice 2 ó 3
f=@(t,x) [x(2); 1-A*sin(x(1))];
[t,x]=ode45(f,[0 10],x0);
plot(t,x(:,1))
grid on
xlabel('t')
ylabel('\theta');
title('Movimiento')
function r = raices(f, x)
y=f(x);
indices=find(y(1:end-1).*y(2:end)<0);
r=zeros(1,length(indices));
for k=1:length(indices)
r(k)=fzero(f, [x(indices(k)), x(indices(k)+1)]);
end
end
end
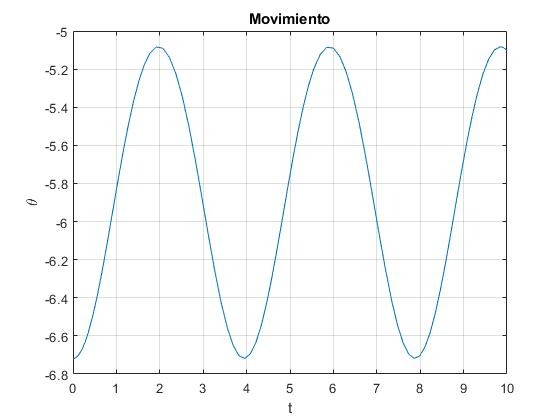
Si elegimos la posición inicial la tercera raíz, el movimiento es θ≥θ3
Oscilaciones de pequeña amplitud alrededor de una posición de equilibrio
Si desarrollamos en serie la función f(θ)=C(1-Asin(θ)), alrededor de la posición de equilibrio (mínimo de la energía potencial) θ0=arcsin(1/A) con A>1.
La ecuación del movimiento se transforma en la ecuación diferencial de un M.A.S.
La frecuencia angular ω del M.A.S. es
Actividades
Se introduce
- La masa puntual m, en el control titulado Masa izquierda
- La masa del bloque que cuelga M, en el control titulado Masa derecha
- La distancia r de la masa puntual m pegada al disco al eje del disco, en el control titulado Posición
- El radio del disco se ha fijado en R=1 m
- La masa del disco se ha fijado en md=1 kg
Se pulsa el botón titulado Nuevo
Se dibuja la función energía potencial, observamos el máximo y el mínimo si existen.
A la derecha, observamos el movimiento del sistema, que oscila alrededor de la posición del mínimo de energía potencial si existe, o el bloque cae si no existe posición de equilibrio estable.
Referencias
M Fiolhais, B Golli, R Nogueira. Mechanical apparatus for the fold catastrophe demonstration. Eur. J. Phys. 42 (2021) 045001
Manuel Fiolhais, Rogério Nogueira. Sistema mecánico con un potencial catastrófico. Revista Española de Física, 34-1, Enero-marzo 2020, págs. 30-33
Greenslade T. B. “Atwood’s” oscillator. Am. J. Phys. 56 (12) December 1988, pp. 1151-1153