

Ecuaciones de Navier-Stokes. Estado transitorio (II)
Coordenadas cilíndicas
Fluido en un tubo de sección circular (I)
Se sitúa un fluido en un tubo horizontal de sección circular, de radio R. En el instante t=0, se establece un gradiente de presión a lo largo del eje Z
En este apartado, vamos a resolver la ecuación diferencial en derivadas parciales
Con la condición de contorno e inicial siguientes:
El fluido parte del reposo en el instante t=0
Ya hemos estudiado la solución de la ecuación diferencial independiente del tiempo, t, el estado estacionario
El perfil de velocidades en el instante t, ux(ρ,t) es la suma del perfil en el estado estacionario y en el estado transitorio
Introducimos esta expresión en la ecuación diferencial, para obtener la correspondiente al estado transitorio
Resolvemos esta ecuación diferencial en derivadas paraciales con las condiciones de contorno e inicial, siguientes
Variables separadas
Expresamos la solución de la ecuación diferencial como producto de dos funciones una que depende de la variable ρ y otra que depende de la variable t
El miembro izquierdo, solamente depende de t y el derecho solamente de ρ. Transformamos una ecuación diferencial en derivadas parciales en un sistema de dos ecuaciones diferenciales
La solución de la primera ecuación diferencial es
En la segunda hacemos primero, el cambio de variable r=αρ/R. Su solución se expresa en términos de funciones de Bessel
Dado que Y0(x)→∞ cuando x→0, el coeficiente c2=0
Aplicamos la condición de contorno en ρ=R
αk son las raíces de la ecuación transcendente, J0(x)=0
La solución de la ecuación diferencial en derivadas parciales, es la superposición
Los coeficientes Bk se determinan a partir de la condición inicial
Teniendo en cuenta la relación de ortogonalidad
Resolvemos las integrales, haciendo el cambio de variable z=ρ/R.
>> syms x k; >> int((1-x^2)*besselj(0,k*x)*x,0,1) ans =(4*besselj(1, k))/k^3 - (2*besselj(0, k))/k^2
El estado transitorio es
El resultado final es la suma del estado estacionario y el estado transitorio
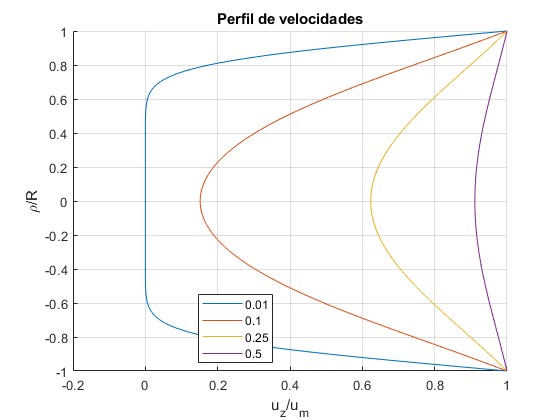
La velocidad máxima en el estado estacionario, se alcanza para ρ=0, en el eje Z
Dividimos entre um para que todas las magnitudes sean adimensionales
Representamos uz(ρ,t)/um en los instantes t=0.001, 0.01, 0.1, 1. Tomamos los 12 raíces αk de la ecuación transcendente J0(x)=0
function navier_stokes_12
x=linspace(0,40,40);
f=@(x) besselj(0,x);
alfa=raices(f,x);
rr=linspace(-1,1, 400);
uz=zeros(length(rr),1);
hold on
for t=[0.001 ,0.01,0.1,1]
i=0;
for r=rr
i=i+1;
uz(i)=1-r^2;
for j=1:length(alfa)
uz(i)=uz(i)-8*besselj(0, alfa(j)*r)*exp(-alfa(j)^2*t)
/(alfa(j)^3*besselj(1,alfa(j)));
end
end
plot(uz,rr,'displayName',num2str(t))
end
hold off
grid on
legend('-DynamicLegend','location','best')
xlabel('u_z/u_m')
ylabel('\rho/R')
title('Perfil de velocidades')
function r = raices(f, x)
y=f(x);
indices=find(y(1:end-1).*y(2:end)<0);
r=zeros(1,length(indices));
for k=1:length(indices)
r(k)=fzero(f, [x(indices(k)), x(indices(k)+1)]);
end
end
end
![]()
Actividades
Se pulsa el botón titulado Nuevo para observar el estado transitorio y su evolución hacia el estado estacionario
Fluido en un tubo de sección circular (II)
Se sitúa un fluido en un tubo horizontal de sección circular, de radio R. En el instante t=0, se desplaza el tubo con velocidad constante V a lo largo del eje Z
En este apartado, vamos a resolver la ecuación diferencial en derivadas parciales
Con la condición de contorno e inicial
El fluido parte del reposo en el instante t=0
Hacemos los cambios de variable, obteniendo una ecuación diferencial en derivadas parciales con magnitudes adimensionales
La condición de contorno e inicial son ahora
Variables separadas
Expresamos la solución de la ecuación diferencial como producto de dos funciones una que depende de la variable x y otra que depende de la variable τ
El miembro izquierdo, solamente depende de τ y el derecho solamente de x. Transformamos una ecuación diferencial en derivadas parciales en un sistema de dos ecuaciones diferenciales
La solución de la primera ecuación diferencial es
En la segunda, hacemos primero, el cambio de variable y=λx. Su solución se expresa en términos de funciones de Bessel
Dado que Y0(x)→∞ cuando x→0, el coeficiente B=0. La solución es
Aplicamos la condición de contorno en x=1, u(1, τ)=0
λn son las raíces de la ecuación transcendente, J0(x)=0
La solución de la ecuación diferencial en derivadas parciales, es la superposición
Los coeficientes An se determinan a partir de la condición inicial
Teniendo en cuenta la relación de ortogonalidad
El resultado es
Simplificamos esta expresión, teniendo en cuenta la propiedad
Obtenemos, finalmente
La solución u(x, τ) se expresa
Deshaciendo el cambio de variable
Representamos el perfil de velocidades uz(ρ,τ)/V, en función de ρ/R, para los instantes τ= 0.01, 0.1, 0.25, 0.5
function navier_stokes_21
x=linspace(0,40,40);
f=@(x) besselj(0,x);
lambda=raices(f,x);
rr=linspace(-1,1, 400);
uz=zeros(length(rr),1);
hold on
for tau=[0.01 ,0.1, 0.25, 0.5]
i=0;
for r=rr
i=i+1;
uz(i)=1;
for j=1:length(lambda)
uz(i)=uz(i)-2*besselj(0,lambda(j)*r)*exp(-lambda(j)^2*tau)
/(lambda(j)*besselj(1,lambda(j)));
end
end
plot(uz,rr,'displayName',num2str(tau))
end
hold off
grid on
legend('-DynamicLegend','location','best')
xlabel('u_z/u_m')
ylabel('\rho/R')
title('Perfil de velocidades')
function r = raices(f, x)
y=f(x);
indices=find(y(1:end-1).*y(2:end)<0);
r=zeros(1,length(indices));
for k=1:length(indices)
r(k)=fzero(f, [x(indices(k)), x(indices(k)+1)]);
end
end
end
Actividades
Se pulsa el botón titulado Nuevo para observar la evolución del perfil de velocidades del fluido en un tubo que se mueve con velocidad constante
Fluido en un tubo de sección circular (III)
Se sitúa un fluido en un tubo horizontal de sección circular, de radio R. En el instante t=0, se establece un gradiente de presión oscilante lo largo del eje Z
En este apartado, vamos a resolver la ecuación diferencial en derivadas parciales
Con las condiciones de contorno
Buscamos una solución de la forma
Donde el símbolo , indica la parte real de un número complejo. Introducimos en la ecuación diferencial en derivadas parciales
Solución particular
Solución de la ecuación diferencial homogénea
La solución particular de esta ecuación diferencial es una constante C. Introduciendo en la ecuación diferencial
Hacemos el cambio z=ρ/R, para expresar la solución en términos de una variable adimensional
Hacemos otro cambio de variable para obtener una ecuación diferencial cuya solución se expresa en términos de las funciones de Bessel J0(x) y Y0(x)
Dado que Y0(x)→∞ cuando x→0, el coeficiente B=0
Teniendo en cuenta que la viscosidad en S.I. se mide en kg/(m·s), α es un número adimensional denominado de Womersley, si este número es grande los efectos de la viscosidad se reducen a una región próxima a las paredes del tubo de radio R
La solución completa es la suma de ambas
El coeficiente A se determina a partir de la condición de contorno
La solución de la ecuación diferencial en derivadas parciales es
Teniendo en cuenta la definición de α, número de Womersley
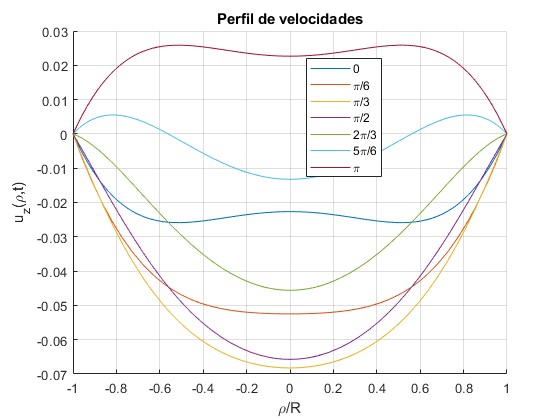
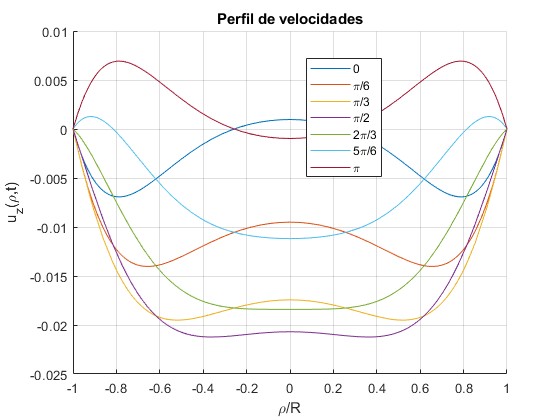
Representamos el perfil de velocidades para n=1, c1=2/π, dos valores del número α=3.34 y 5.78 en los instantes tales que ωt=0, π/6, π/3, π/2, 2π/3, 5π/6, π (0, 30, 60, 90, 120, 150, 180)
hold on
n=1;
alfa=3.34; %nú.mero de Womersley
c1=2/pi; %coeficiente
for wt=(0:30:180)*pi/180
f=@(x) real(1i*c1*(1-besselj(0, alfa*sqrt(n)*x*1i^(3/2))/
besselj(0,alfa*sqrt(n)*1i^(3/2)))*exp(1i*n*wt)/(alfa^2*n));
fplot(f,[-1,1])
end
hold off
xlabel('\rho/R');
legend('0','\pi/6','\pi/3','\pi/2','2\pi/3','5\pi/6','\pi','location','best')
ylabel('u_z(\rho,t)')
grid on
hold off
title('Perfil de velocidades')
Cambiamos α=5.78
Superposión
Consideremos un gradiente de presión que es una función periódica del tiempo de forma cualesquiera, de periodo P o frecuencia angular ω=2π/P
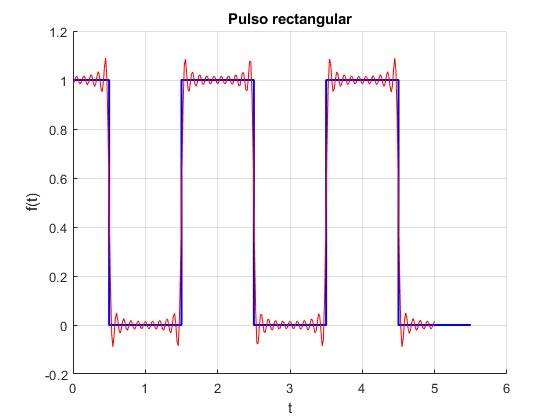
Por ejemplo, en la página titulada Series de Fourier, estudiamos la función periódica, pulso rectangular de periodo P=2, frecuencia angular, ω=π
Los coeficientes de la serie son c0=1/2, c1=2/π, c3=-2/(3π), c5=2/(5π), ...
Representamos aproximadamente, los pulsos rectangulares mediante la suma de 10 términos del desarrollo en serie
n=20;
hold on
x=[0,0.5,0.5,1.5,1.5,2.5,2.5,3.5,3.5,4.5,4.5, 5.5];
y=[1,1,0,0,1,1,0,0,1,1,0,0];
plot(x,y,'b','linewidth',1.5)
x=linspace(0,5,300);
y=zeros(length(x),1);
for i=1:length(x)
y(i)=1/2;
for k=1:2:n
y(i)=y(i)+(-1)^((k-1)/2)*2*cos(k*pi*x(i))/(k*pi);
end
end
plot(x,y, 'r');
title('Pulso rectangular')
xlabel('t');
ylabel('f(t)')
grid on
hold off
En el estado estacionario, bajo un gradiente de presión
Para un gradiente de presión representado por una función periódica cuyos coeficientes cn, n=0,1,2,3,.. son conocidos, el perfil de velocidades es la superposición
Fluido en un cilindro de altura infinita
Se sitúa un fluido en un cilindro vertical, de radio R y altura muy grande. En el instante t=0, se le proporciona una velocidad angular de rotación ω
![]()
En este apartado, vamos a resolver la ecuación diferencial en derivadas parciales
Con las condiciones de contorno e inicial siguientes:
El fluido parte del reposo en el instante t=0
Ya hemos estudiado la solución de la ecuación diferencial independiente del tiempo, t, el estado estacionario
El perfil de velocidades en el instante t, ux(ρ,t) es la suma del perfil en el estado estacionario y en el estado transitorio
Introducimos esta expresión en la ecuación diferencial, para obtener la correspondiente al estado transitorio
Resolvemos esta ecuación diferencial en derivadas paraciales con las condiciones de contorno e inicial, siguientes
Variables separadas
Expresamos la solución de la ecuación diferencial como producto de dos funciones una que depende de la variable ρ y otra que depende de la variable t
El miembro izquierdo, solamente depende de t y el derecho solamente de ρ. Transformamos una ecuación diferencial en derivadas parciales en un sistema de dos ecuaciones diferenciales
La solución de la primera ecuación diferencial es
En la segunda hacemos primero, el cambio de variable r=αρ/R. Su solución se expresa en términos de funciones de Bessel
Dado que Y1(x)→∞ cuando x→0, el coeficiente c2=0
Aplicamos la condición de contorno en ρ=R
αk son las raíces de la ecuación transcendente, J1(x)=0
La solución de la ecuación diferencial en derivadas parciales, es la superposición
Los coeficientes Bk se determinan a partir de la condición inicial
Teniendo en cuenta la relación de ortogonalidad
Resolvemos las integrales, haciendo el cambio de variable z=ρ/R.
El estado transitorio es
El resultado final es la suma del estado estacionario y el estado transitorio
Dividimos entre ωR para que todas las magnitudes sean adimensionales
Representamos uz(ρ,t)/ωR en los instantes t=0.001, 0.01, 0.1, 1. Tomamos los 12 raíces αk de la ecuación transcendente J0(x)=0
function navier_stokes_13
x=linspace(0,80,80);
f=@(x) besselj(1,x);
alfa=raices(f,x);
disp(alfa)
rr=linspace(0,1, 200);
uz=zeros(length(rr),1);
hold on
for t=[0.001 ,0.01,0.1,1]
i=0;
for r=rr
i=i+1;
uz(i)=r;
for j=1:length(alfa)
uz(i)=uz(i)-2*besselj(1, alfa(j)*r)*exp(-alfa(j)^2*t)/
(alfa(j)*besselj(2,alfa(j)));
end
end
plot(uz,rr,'displayName',num2str(t))
end
hold off
grid on
legend('-DynamicLegend','location','best')
xlabel('u_\phi/\omegaR')
ylabel('\rho/R')
title('Perfil de velocidades')
function r = raices(f, x)
y=f(x);
indices=find(y(1:end-1).*y(2:end)<0);
r=zeros(1,length(indices));
for k=1:length(indices)
r(k)=fzero(f, [x(indices(k)), x(indices(k)+1)]);
end
end
![]()
Actividades
Se pulsa el botón titulado Nuevo para observar el estado transitorio y su evolución hacia el estado estacionario
Referencias
Tasos C. Papanastasiou, Georgios C. Georgiou, Andreas N. Alexandrou. Viscous Fluid Flow. CRC Press 2000. Sección 6.6
A. Salih. An Exact Solution of Navier–Stokes Equation. July 2011
Michel O. Deville. An Introduction to the Mechanics of Incompressible Fluids. Springer (2022), pp. 73-76