

Ecuaciones de Navier-Stokes. Estado transitorio (I)
Coordenadas rectangulares
Empezamos con las ecuaciones de Navier-Stokes en coordenadas rectangulares en dos dimensiones
Fluido sobre una placa plana
Una placa indefinida soporta un fluido de altura infinita. En el instante inicial t=0, se pone en movimiento con velocidad v cuya dirección es el eje X. Vamos a determinar como evlouciona el perfil ux(y, t) de velocidades del fluido
Como la componente uy y sus derivadas son nulas, las ecuaciones de Navier-Stokes se simplifican
La ecuación de continuidad nos indica que ux no depende de x. La presión p no depende de x
Resolvemos la ecuación diferencial
Con las condiciones iniciales, en el instante t=0, ux(y)=0, 0≤y<∞. El fluido parte del reposo
y las condiciones de contorno para t>0
- ux(0, t)=v en y=0
- ux(∞, t)=0 en y=∞
Haciendo el cambio de variable
Sustituyendo en la ecuación diferencial
Integramos la derivada primera s de ux
Integramos de nuevo, sabiendo que para y=0, ux=v
Determinamos la constante c1 con la condición de contorno y→∞, ux→0
El perfil de velocidades en el instante t es
![]()
Representamos el perfil las velocidades de ux/v para los instantes k=tν=4,1,0.25, 0.062, 0.0025
old on
for k=[4,1,0.25,0.062, 0.0025]
fplot(@(y) erfc(y/(2*sqrt(k))),[0,3],'displayName',num2str(k))
end
hold off
grid on
legend('-DynamicLegend','location','best')
xlabel('y')
ylabel('u_x/v')
title('Perfil de velocidades')
![]()
Placa oscilante
Una placa indefinida soporta un fluido de altura infinita. En el instante inicial t=0, se pone en movimiento oscilatorio con velocidad vcos(ωt) cuya dirección es el eje X. Vamos a determinar como evlouciona el perfil ux(y, t) de velocidades del fluido
Resolvemos la ecuación diferencial
con las condiciones de contorno siguientes
>
Probamos una solución de variables separadas, una que depende de y y otra del tiempo t
El símbolo , indica la parte real del número complejo
Introducimos la solución en la ecuación diferencial en derivadas parciales, obtenemos una ecuación diferencial en Y(y) cuya solución es
Los coeficientes c1 y c2 se determinan a partir de las condiciones de contorno.
Cuando y→∞, Y(y)→∞, por lo que c1 tiene que ser cero
La solución de la ecuación diferencial en derivadas parciales es
La condición de contorno en y=0 determina el coeficiente c2
Se trata de la ecuación de un movimiento ondulatorio armónico
Cuya amplitud decrece exponencialmente con y
De longitud de onda
La velocidad de propagación (velocidad de fase)
Actividades
Se pulsa el botón titulado Nuevo para observar cómo cambia el perfil de velocidades con el tiempo
Fluido entre dos placas planas y paralelas (I)
Situamos el fluido entre dos placas planas y paralelas, distantes h. En el instante t=0, la placa inferior se pone en movimiento con velocidad V cuya dirección es el eje X
Resolvemos la ecuación diferencial
Con las condiciones iniciales, en el instante t=0, ux(y,0)=0, 0≤y≤h. El fluido parte del reposo
y las condiciones de contorno para t>0
- ux(0, t)=V en y=0
- ux(h, t)=0 en y=h
Ya hemos estudiado la solución en el estado estacionario, que repetimos
Estado estacionario
Integramos dos veces
Determinamos las constantes c1 y c2 con las condiciones de contorno
El perfil de velocidades ux(y) es lineal en el estado estacionario
El perfil de velocidades en el instante t, ux(y,t) es la suma del perfil en el estado estacionario y en el estado transitorio
Introducimos esta expresión en la ecuación diferencial para obtener la correspondiente al estado transitorio
Resolvemos esta ecuación diferencial en derivadas paraciales con las condiciones de contorno e inicial, siguientes
Variables separadas
Expresamos la solución de la ecuación diferencial como producto de dos funciones una que depende de la variable y y otra que depende de la variable t
El miembro izquierdo, solamente depende de t y el derecho solamente de y. Transformamos una ecuación diferencial en derivadas parciales en un sistema de dos ecuaciones diferenciales
Las soluciones de las ecuaciones diferenciales son
Los coeficientes c1 y c2 se determinan a partir de las condiciones de contorno
La solución de la ecuación diferencial enderivadas parciales, es la superposición
Las constantes Bk se determinan a partir de la condición inicial
Teniendo en cuenta el resultado
>> syms m n z; >> assume(m,'integer') >> assume(n,'integer') >> y=int(sin(m*pi*z)*sin(n*pi*z), z,0,1) y =-(m*cos(pi*m)*sin(pi*n) - n*cos(pi*n)*sin(pi*m))/(pi*(m^2 - n^2)) >> limit(y,m,n) ans =cos(pi*n)^2/2
Los coeficientes Bk
Resolvemos las integrales, haciendo el cambio de variable z=y/h. Integramos por partes la segunda
El resultado final es la suma del estado estacionario y el estado transitorio
Representamos ux(y,t)/V en los instantes t=0.0001, 0.001, 0.01, 0.1, 1. Tomamos los 150 primeros términos del desarrollo en serie
yy=linspace(0,1, 200);
ux=zeros(length(yy),1);
hold on
for t=[0.0001,0.001 ,0.01,0.1,1]
i=0;
for y=yy
i=i+1;
ux(i)=1-y;
for k=1:150
ux(i)=ux(i)-2*sin(k*pi*y)*exp(-k^2*pi^2*t)/(pi*k);
end
end
plot(ux,yy,'displayName',num2str(t))
end
hold off
grid on
legend('-DynamicLegend','location','best')
xlabel('u_x/v')
ylabel('y/h')
title('Perfil de velocidades')
![]()
Para t=1, se ha establecido el perfil casi lineal de las velocidades del fluido, se está muy próximo al estado estacionario
Comparando esta figura con la de la primer apartado, vemos que la presencia del la plano paralelo en y=h no afecta al prefil de velocidades del fluido al principio
Actividades
Se pulsa el botón titulado Nuevo para observar el estado transitorio y su evolución hacia el estado estacionario
Fluido entre dos placas planas y paralelas (II)
Situamos el fluido entre dos placas planas y paralelas, distantes h. En el instante t=0, se establece un gradiente de presión a lo largo del eje X,
Para determinar el perfil de velocidades ux(y,t), resolvemos la ecuación diferencial
Con las condicones de contorno e inicial
Estado estacionario
Integramos dos veces la ecuación diferencial
Aplicando la condición de contorno, ux(0,t)=0, resulta c2=0
Aplicando la condición de contorno, ux(h, t)=0, resulta
La solución de la ecuación diferencial en derivadas parciales ux(y, t) es la suma del estado estacionario y del estado transitorio
Introducimos en la ecuación diferencial en derivadas parciales
Con las condiciones de contorno e inicial
La solución es similar al apartado anterior, variables separadas
Los coeficientes Bk se determinan a partir de la condición inicial
Teniendo en cuenta que
Calculamos los coeficientes Bk
Se hace el cambio de variable z=y/h, y se integra dos veces por partes
El resultado es
En el estado estacionario, la máxima velocidad del fluido se alcanza en y=h/2
Dividimos ux(y, t)/um
Representamos ux(y,t) en los instantes t=0.0001, 0.001, 0.01, 0.1, 1. Tomamos los 150 primeros términos del desarrollo en serie
yy=linspace(0,1, 200);
ux=zeros(length(yy),1);
hold on
for t=[0.0001,0.001 ,0.01,0.1,1]
i=0;
for y=yy
i=i+1;
ux(i)=4*(1-y)*y;
for k=1:2:300
ux(i)=ux(i)-32*sin(k*pi*y)*exp(-k^2*pi^2*t)/(pi^3*k^3);
end
end
plot(ux,yy,'displayName',num2str(t))
end
hold off
grid on
legend('-DynamicLegend','location','best')
xlabel('u_x/u_m')
ylabel('y/h')
title('Perfil de velocidades')
![]()
Actividades
Se pulsa el botón titulado Nuevo para observar el estado transitorio y su evolución hacia el estado estacionario
Fluido entre dos placas planas y paralelas (III)
Situamos el fluido entre dos placas planas y paralelas, y=-h e y=h. En el instante t=0, se establece un gradiente de presión a lo largo del eje X, que contiene un término oscilatorio con frecuencia angular ω
Para determinar el perfil de velocidades ux(y,t), resolvemos la ecuación diferencial
Con las condiciones de contorno
Estado estacionario
Integramos dos veces la ecuación diferencial
Aplicando la condición de contorno, determinamos las constantes c1 y c2
El perfil de velocidades es de tipo parabólico en el estado estacionario. La máxima velocidad se alcanza en y=0
La solución de la ecuación diferencial en derivadas parciales ux(y, t) es la suma del estado estacionario y del estado transitorio
Donde el símbolo , indica la parte real de un número complejo. Introducimos en la ecuación diferencial en derivadas parciales
Resolvemos la ecuación diferencial
La solución particular es la constante D
La solución completa es la suma de la homogénea y la particular
Teniendo en cuenta la raíz de la unidad imaginaria, obtenemos
Las condiciones de contorno determinan los coeficientes A y B
La expresión de f(y) es
La solución de la ecuación diferencial en derivadas parciales ux(y, t) es
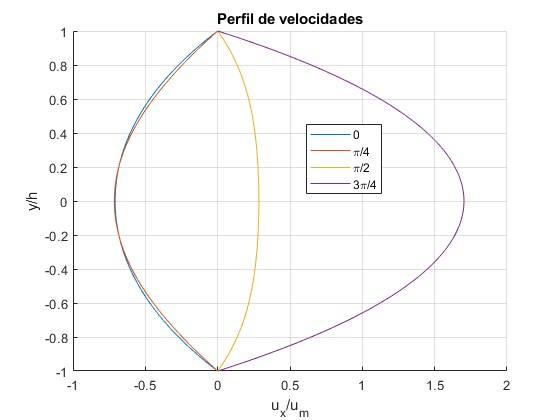
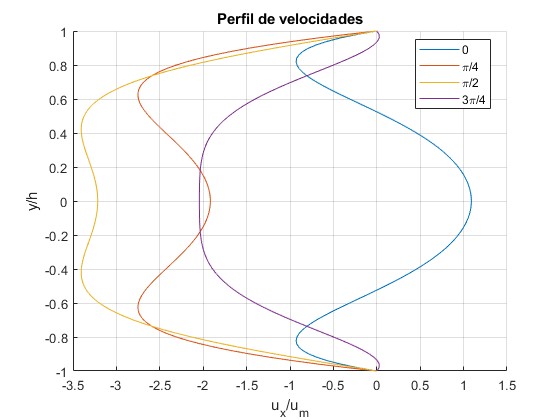
Dividiendo por la velocidad máxima , llegamos a la expresión final del perfil de velocidades del fluido
Nota: En la expresión que figura en la segunda referencia, hay un signo - delante del coeficiente b/c. Como puede comprobar el lector en el código MATLAB, debe tratarse de un error tipográfico
Representamos el perfil de velocidades en los instantes ωt=0, π/4, π/2, 3π/4, para dos valores de , tomando la constante
h=1;
k=1/sqrt(2);
hold on
yy=linspace(-1,1,100);
cte=4;
for wt=[0, pi/4, pi/2, 3*pi/4]
ux=zeros(1,length(yy));
j=0;
for y=yy
j=j+1;
a=cos(k*y)*cosh(k*y)*cos(k*h)*cosh(k*h)+sin(k*y)*sinh(k*y)*sin(k*h)*
sinh(k*h);
b=cos(k*y)*cosh(k*y)*sin(k*h)*sinh(k*h)-sin(k*y)*sinh(k*y)*cos(k*h)*
cosh(k*h);
c=cos(k*h)^2*cosh(k*h)^2+sin(k*h)^2*sinh(k*h)^2;
ux(j)=1-y^2/h^2-cte*((1-a/c)*sin(wt)+b*cos(wt)/c);
% ux(j)=1-y^2/h^2+cte*real((1-cosh((1+1i)*k*y)/cosh((1+1i)*k*h))*
1i*exp(1i*wt));
end
plot(ux,yy)
end
hold off
grid on
ylabel('y/h')
legend('0','\pi/4','\pi/2','3\pi/4','location','best')
xlabel('u_x/u_m')
title('Perfil de velocidades')
Actividades
Referencias
Tasos C. Papanastasiou, Georgios C. Georgiou, Andreas N. Alexandrou. Viscous Fluid Flow. CRC Press 2000. Sección 6.6
Michel O. Deville. An Introduction to the Mechanics of Incompressible Fluids. Springer (2022), pp. 68-70