

Una esfera que rueda sobre una plataforma giratoria
Cuando la plataforma es horizontal la esfera describe una órbita circular con una velocidad angular que es las dos séptimas partes de la velocidad angular de la plataforma. Cuando se inclina la plataforma, se superpone al movimiento circular un movimiento rectilíneo con velocidad constante hacia un lado (no a lo largo de la pendiente) denominada velocidad de deriva.
Ecuaciones del movimiento de la esfera
Para describir el movimiento de la esfera, situamos el Sistema de Referencia Inercial del siguiente modo: eje Y a lo largo de la plataforma inclinada un ángulo α, el eje X perpendicular al mismo y el eje Z perpendicular al plano de la plataforma, tal como se muestra en las figuras.
En un instante dato t, la esfera se encuentra en la posición (x, y) con velocidad, , la velocidad angular de rotación es rodando sin deslizar sobre la plataforma. La velocidad del punto P de contacto de la esfera con la plataforma es
Si el punto de contacto P dista r del eje de rotación de la plataforma que gira con velocidad angular Ω. Las componentes de la velocidad del punto P
vx=-Ω·r·sinθ=-Ω·y
vy=Ω·r·cosθ=Ω·x
Para que la esfera ruede sin deslizar, el punto de contacto P debe de estar en reposo respecto de la plataforma. Se cumplirá por tanto,
-Ω·y=Vx-ωy·R
Ω·x=Vy+ωx·R
La condición de rodar sin deslizar Vc=ωR, se transforma en esta condición para una plataforma en rotación con velocidad angular constante Ω
Las fuerzas sobre la esfera son:
- El peso mg
- La reacción del plano N
- La fuerza de rozamiento F en el punto de contacto P, cuyo valor y dirección en el plano son desconocidos
Sean Fx y Fy las componentes de la fuerza de rozamiento en el punto P de contacto de la esfera con el plano en rotación.
Ecuaciones del movimiento
Ecuación del movimiento de traslación del centro de masas
Ecuación del movimiento de rotación alrededor de un eje que pasa por el centro de masas
La componente ωz de la velocidad angular permanece constante
Para una esfera la fórmula del momento de inercia es Ic=2mR2/5
Eliminamos las dos componentes desconocidas de la fuerza de rozamiento Fx, y Fy en las ecuaciones del movimiento.
Derivamos respecto del tiempo las ecuaciones (1)
Eliminamos las derivadas de las componentes de la velocidad angular dωx/dt, y dωy/dt, y obtenemos las ecuaciones diferenciales del movimiento del c.m. de la esfera.
Trayectoria del c.m. de la esfera
Tenemos que resolver un sistema de dos ecuaciones diferenciales acopladas. Para desacoplarlas, despejamos Vy de la primera ecuación y la introducimos en la segunda.
La solución de esta ecuación diferencial (similar a la de un MAS) es de la forma
Vx=Acos(k·t)+B·sin(k·t)+c
donde k=2Ω/7
Introduciendo Vx en la ecuación diferencial, obtenemos la solución particular c de la ecuación diferencial de segundo orden.
A partir de la expresión de Vx, obtenemos la componente Vy de la velocidad del c.m.
Las constantes A y B se determinan a partir de las condiciones iniciales. En el instante t=0, las componentes de la velocidad del c.m. son (V0x, V0y).
Podemos escribir estas ecuaciones de forma general definiendo dos variables, cuyo significado veremos más adelante.
Vx=(V0x-Vd)·cos(ωct)-V0y·sin(ωc·t)+Vd
Vy=(V0x-Vd)·sin(ωct)+V0y·cos(ωc·t)
Sabiendo que en el instante t=0, la posición del centro de la esfera es (x0, y0), calculamos la abscisa x del centro de la esfera integrando la expresión de la velocidad Vx en función del tiempo. Se hace lo mismo para la ordenada y.
Podemos escribir de forma alternativa esta ecuación de la forma
Elevando al cuadrado y sumando
Se trata de la ecuación de una circunferencia centrada en el punto (a, b) y de radio Rc
(x-a)2+(y-b)2=Rc2
donde
El centro se mueve a lo largo del eje X (perpendicular a la dirección de inclinación Y del plano) con velocidad Vd, que se denomina velocidad de deriva.
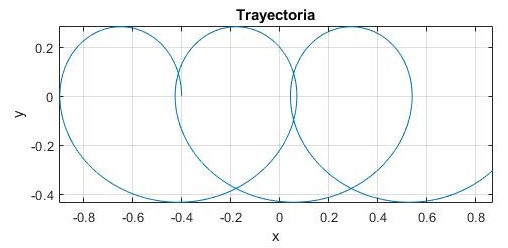
Ejemplo
- Posición inicial de la esfera: y0=0, x0=-0.4
- Velocidad inicial de la esfera: V0=0.2, φ=90º bien, V0x=0, V0y=0.2
- Velocidad angular de rotación de la plataforma: Ω=2 rad/s
- Inclinación de la plataforma α=0.2
x0=-0.4; %posición inicial
y0=0;
V0x=0; %velocidad incial
V0y=0.2;
W=2; %velocidad angular de rotación de la plaformsa
alfa=0.2*pi/180; %inclinación
wc=2*W/7; %frecuencia angular
Vd=5*9.8*sin(alfa)/(2*W); %velocidad deriva
x=@(t) x0+((V0x-Vd)*sin(wc*t)+V0y*(cos(wc*t)-1))/wc+Vd*t;
y=@(t) y0+((V0x-Vd)*(1-cos(wc*t))+V0y*sin(wc*t))/wc;
fplot(x,y,[0,10*pi]) %trayectoria
axis equal
xlabel('x')
ylabel('y')
grid on
title('Trayectoria')
Casos particulares
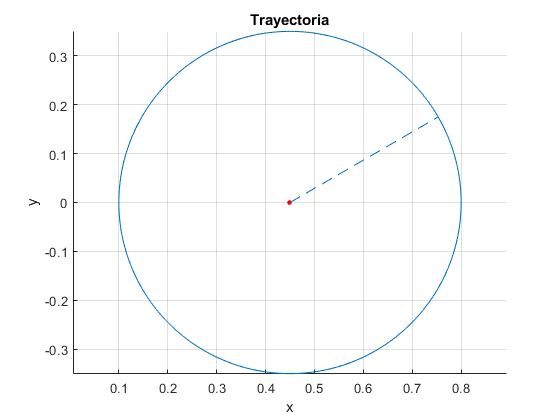
Cuando la plataforma está horizontal α=0
Si la plataforma está horizontal α=0, y Vd=0
La circunferencia está centrada en el punto fijo
La esfera describe una circunferencia alrededor de un centro que no coincide con el eje de rotación de la plataforma. El tiempo que tarda en dar una vuelta completa es
7/2 veces el tiempo que precisa la plataforma en dar una vuelta completa. Así pues, ωc es la frecuencia angular de la esfera en su movimiento orbital sobre la plataforma giratoria. Como la esfera rueda sin deslizar, no se deberá confundir ωc con la velocidad angular de rotación de la esfera alrededor de su propio eje
Ejemplo:
- Posición inicial de la esfera y0=0, x0=0.8
- Velocidad inicial de la esfera: V0=0.2, φ=90º bien, V0x=0, V0y=0.2
- Velocidad angular de rotación de la plataforma: Ω=2 rad/s
- Inclinación de la plataforma α=0
x0=0.8; %posición inicial
y0=0;
V0x=0; %velocidad incial
V0y=0.2;
W=2; %velocidad angular de rotación de la plaformsa
alfa=0; %inclinación
wc=2*W/7; %frecuencia angular
Vd=5*9.8*sin(alfa)/(2*W); %velocidad deriva
x=@(t) x0+((V0x-Vd)*sin(wc*t)+V0y*(cos(wc*t)-1))/wc+Vd*t;
y=@(t) y0+((V0x-Vd)*(1-cos(wc*t))+V0y*sin(wc*t))/wc;
a=x0-V0y/wc; b=y0*V0y/wc; %centro
Rc=sqrt(V0x^2+V0y^2)/wc; %radio
hold on
fplot(x,y,[0,2*pi/wc]) %trayectoria
plot(a,b,'ro','markersize',3,'markeredgecolor' ,'r','markerfacecolor','r')
line([a,a+Rc*cos(pi/6)],[b,b+Rc*sin(pi/6)],'lineStyle','--')
hold off
axis equal
xlabel('x')
ylabel('y')
grid on
title('Trayectoria')
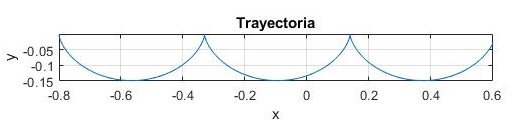
Cuando la esfera parte del reposo
V0x=V0y=0 desde el origen x0=0, y0=0
que son las ecuaciones de una cicloide
Ejemplo:
- Posición inicial de la esfera: y0=0, x0=-0.8
- Inclinación de la plataforma α=0.2
- Velocidad inicial de la esfera: V0=0, φ=0º bien, V0x=0.0, V0y=0.0
- Velocidad angular de rotación de la plataforma: Ω=2 rad/s
x0=-0.8;
y0=0;
V0x=0; %velocidad incial
V0y=0;
W=2; %velocidad angular de rotación de la plaformsa
alfa=0.2*pi/180; %inclinación
wc=2*W/7; %frecuencia angular
Vd=5*9.8*sin(alfa)/(2*W); %velocidad deriva
x=@(t) x0+((V0x-Vd)*sin(wc*t)+V0y*(cos(wc*t)-1))/wc+Vd*t;
y=@(t) y0+((V0x-Vd)*(1-cos(wc*t))+V0y*sin(wc*t))/wc;
fplot(x,y,[0,10*pi]) %trayectoria
axis equal
xlabel('x')
ylabel('y')
grid on
title('Trayectoria')
Movimiento rectilíneo
Si V0y=0, y V0x=Vd.
x=x0+Vd·t
y=y0
La esfera se mueve horizontalmente a lo largo del eje X (no a lo largo del plano inclinado) con velocidad constante.
Ejemplo:
- Posición inicial de la esfera: y0=0, x0=-0.8
- Inclinación de la plataforma α=0.2
- Velocidad inicial de la esfera: V0=5g·sinα/(2Ω), φ=0º bien, V0x=0.043, V0y=0.0
- Velocidad angular de rotación de la plataforma: Ω=2 rad/s
x0=-0.8; %posición inicial
y0=0;
V0x=0.043; %velocidad incial
V0y=0;
W=2; %velocidad angular de rotación de la plaformsa
alfa=0.2*pi/180; %inclinación
wc=2*W/7; %frecuencia angular
Vd=5*9.8*sin(alfa)/(2*W); %velocidad deriva
x=@(t) x0+((V0x-Vd)*sin(wc*t)+V0y*(cos(wc*t)-1))/wc+Vd*t;
y=@(t) y0+((V0x-Vd)*(1-cos(wc*t))+V0y*sin(wc*t))/wc;
fplot(x,y,[0,5*pi],'color','r') %trayectoria
axis equal
xlabel('x')
ylabel('y')
grid on
title('Trayectoria')

Actividades
Se introduce
-
La posición de partida x0, en el control titulado Posición. La ordenada se ha fijado en y0=0.
-
La velocidad angular de rotación Ω de la plataforma, en el control titulado Velocidad angular
-
La velocidad inicial V0 de la esfera, en el control titulado Velocidad inicial
-
La orientación φ del vector velocidad inicial V0, en el control titulado Angulo velocidad. Las componentes del vector velocidad son: V0x=V0·cosφ, V0y=V0·sinφ.
-
El ángulo α de inclinación de la plataforma, en el control titulado Inclinación plataforma.
Se pulsa el botón titulado Nuevo
Se observa la trayectoria del centro de la esfera sobre la plataforma horizontal e inclinada.
Referencias
Sambles J. R., Preist T. W., Lang S. R., Toms R. P. A rolling sphere on a tilted rotating turntable. Phys. Educ. 18, (1983), pp. 234-239