

Tirando de una caja con una cuerda elástica. Fuerza constante
El operario ejerce una fuerza constante
Tenemos en este caso, un sistema de dos partículas bajo la acción de dos fuerzas externas, la fuerza F que ejerce el operario y la fuerza de rozamiento Fr que ejerce el suelo sobre la caja y una fuerza de interacción mutua, que es la que ejerce el muelle elástico deformado que une ambos cuerpos. En la figura, se muestra la situación inicial
Supongamos que un operario de masa m tira del extremo del muelle elástico de constante k con una fuerza constante F. El otro extremo del muelle elástico está unido a una caja de masa M. Estudiaremos la dinámica del sistema formado por ambos cuerpos. El planteamiento del problema tiene dos partes:
-
Cuando la caja está en reposo en la posición x0
-
Cuando la caja está en movimiento
La caja está en resposo
En un determinado instante t, el operario se encuentra en la posición y.
Las fuerzas sobre el operario son:
-
La fuerza constante F
-
La fuerza que ejerce el muelle elástico deformado k(y-x0-d)
Como la caja está en reposo, la fuerza de rozamiento Fr se equilibra con la fuerza que ejerce el muelle elástico.

La ecuación del movimiento del operario es
cuya solución es
La amplitud y la fase inicial se determinan a partir de las condiciones iniciales: En el instante t=0, el operario parte de la posición y0 con velocidad v0y
En el instante tf en el que la fuerza de rozamiento alcanza su valor máximo μsMg, la caja empieza a deslizar.
k(y-x0-d)= μsMg
La posición yf y velocidad final vfy del operario son
Cuando empujamos una caja de masa M, la fuerza F mínima necesaria para que empiece a deslizar es F= μsMg. Sin embargo, si tiramos de la caja por medio de un muelle, la fuerza F mínima necesaria es la mitad F= μsMg/2, como vamos a demostrar a continuación:
La caja parte de la posición x0=0, y el operario de la posición y0=d, con velocidad v0y=0
Con estas condiciones iniciales, la amplitud A y la fase inicial φ valen, respectivamente
A=F/(mω2) y φ=3π/2
Para que la caja empiece a deslizar tiene que existir la raíz tf de la ecuación
es decir
El valor mínimo de F= μsMg/2
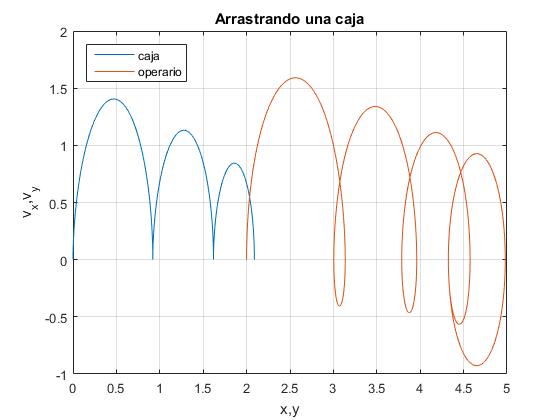
Si F< μsMg/2, la caja permanece en reposo y el operario describe un M.A.S. de amplitud A y frecuencia angular ω. La posición de equilibrio (la fuerza sobre le operario es nula) se encuentra en
La figura muestra la trayectoria del operario en el espacio de las fases x-v, la caja está en reposo en el origen. El operario alcanza una velocidad máxima cuando pasa por la posición de equilibrio y una velocidad mínima en d y en .
Datos: F=3 N, M=1 kg, k=8 N/m, μs=0.75
La caja empieza a deslizar
En un determinado instante t, el operario se encuentra en la posición y y la caja se encuentra en la posición x.
Las fuerzas sobre el operario son:
- La fuerza constante F
- La fuerza que ejerce el muelle elástico deformado k(y-x-d)
Las fuerzas sobre la caja en movimiento son:
- La fuerza que ejerce el muelle k(y-x-d)
- La fuerza de rozamiento Fr= μkMg
Las ecuaciones del movimiento de la caja y del operario son, respectivamente
Movimiento relativo
Multiplicamos la primera ecuación por m y la segunda por M y las restamos
Llamando ξ=y-x-d
La solución de esta ecuación diferencial es
Movimiento del centro de masas
La posición del centro de masas es
Sumando las dos ecuaciones diferenciales
El movimiento del centro de masas depende solamente de las fuerzas externas y es uniformemente acelerado
-
Cuando F> μkMg, el centro de masas se acelera,
-
Cuando F< μkMg el centro de masas decelera, su velocidad disminuye
-
Cuando F= μkMg, el centro de masas se mueve con velocidad constante
Posición de las partículas del sistema
Conocido la ecuación del movimiento relativo de las dos partículas ξ(t) y la posición del centro de masas z(t), despejamos la posición x de la caja y la posición y del operario.
y-x-d= ξ(t)
my+Mx=(m+M)z(t)
La amplitud B, la fase φ,, la posición inicial z0 y la velocidad inicial v0z del centro de masas se determinan a partir de las condiciones iniciales.
En el instante t=0, la posición de la caja es x0 y parte del reposo v0x=0
La posición y0 y velocidad v0y del operario son las finales de la etapa anterior:
La posición inicial y la velocidad inicial del centro de masas son
La velocidad de la caja en esta etapa es
La velocidad de la caja se hace cero en un instante t raíz de la ecuación trascendente
En la figura, se muestra la velocidad de la caja en función del tiempo. La raíz buscada t está entre el instante t1 para el que la velocidad es máxima y el instante t2 para el cual la velocidad es mínima. El máximo y el mínimo son las raíces de la ecuación
m=1; %masa de la caja
M=1; %masa del operario
fuerza=5.5; %fuerza con que tira
muEst=0.75; %coeficiente estático
muDin=0.5; %coeficiente cinético
k=8; %constante del muelle
w1=sqrt(k/m);
w2=sqrt(k*(M+m)/(M*m));
t=0;
d=2; %separación inicial caja - operario
y=d; %posición operario
x0=0;
x=x0; %posición caja
vX=0.0; %velocidad caja
vY=0.0; %velocidad operario
amplitud_1=abs(y-fuerza/(m*w1^2)-x0-d);
fase_1=3*pi/2;
tipo=1; %inicialmente parado
t=0;
dt=0.01; %intervalo
tf=5.2; %tiempo final
x=0;
vX=0;
xx=zeros(1,tf/dt); %posición de la caja
vc=zeros(1,tf/dt); %velocidad de la caja
yy=zeros(1,tf/dt); %posición del operario
vp=zeros(1,tf/dt); %velocidad del operario
tipo=1; %inicialmente parada
xx(1)=0; %posición de la caja
vc(1)=0;
yy(1)=y;
vp(1)=0;
i=1;
for tt=0:dt:tf
t=t+dt;
i=i+1;
switch tipo
case 1
y=amplitud_1*sin(w1*t+fase_1)+fuerza/(m*w1^2)+x0+d;
vY=amplitud_1*w1*cos(w1*t+fase_1);
fElastica=m*w1^2*(y-x-d);
if (fElastica>0) && (fElastica>muEst*9.8*M)
%calcula t1 de forma exacta
angulo=asin((muEst*M*9.8-fuerza)/(m*w1^2*amplitud_1));
if angulo<fase_1
angulo=2*pi+angulo;
end
t1=(angulo-fase_1)/w1;
y1=amplitud_1*sin(w1*t1+fase_1)+fuerza/(m*w1^2)+x0+d;
y0=muEst*M*9.8/(m*w1^2)+x0+d;
vY1=amplitud_1*w1*cos(w1*t1+fase_1);
Ax=amplitud_1*w1*cos(w1*t1+fase_1)/w2;
Ay=muEst*M*9.8/(m*w1^2)-(fuerza/m+muDin*9.8)/w2^2;
amplitud_2=sqrt(Ax^2+Ay^2);
fase_2=atan2(Ay, Ax);
if fase_2<0
fase_2=2*pi+fase_2;
end
z0=(M*x0+m*y1)/(m+M);
vZ0=m*vY1/(m+M);
t=0.0;
tipo=2;
end
case 2
z=z0+vZ0*t+(fuerza-muDin*9.8*M)*t^2/(2*(m+M));
s=d+amplitud_2*sin(w2*t+fase_2)+(fuerza/m+muDin*9.8)/w2^2;
y=M*s/(m+M)+z;
x=z-m*s/(m+M);
vX=vZ0+(fuerza-muDin*9.8*M)*t/(m+M)-
m*amplitud_2*w2*cos(w2*t+fase_2)/(m+M);
vY=vZ0+(fuerza-muDin*9.8*M)*t/(m+M)+
M*amplitud_2*w2*cos(w2*t+fase_2)/(m+M);
if vX<0.0
tipo=1;
vX=0.0;
%calcular numéricamente el tiempo
angulo=asin((-fuerza+muDin*M*9.8)/(m*w2^2*amplitud_2));
ang=pi-angulo;
if angulo<fase_2
angulo=2*pi+angulo;
ang=2*pi+ang;
end
if ang>2*pi
ang=ang-2*pi;
end
tMax=(angulo-fase_2)/w2; %máximo
tMin=(ang-fase_2)/w2;
f=@(t) vZ0+(fuerza-muDin*9.8*M)*t
/(m+M)-m*amplitud_2*w2*cos(w2*t+fase_2)/(m+M);
t2=fzero(f,[tMin, tMax]); %resolver la ecuación trascendente
z=z0+vZ0*t2+(fuerza-muDin*9.8*M)*t2^2/(2*(m+M));
s=d+amplitud_2*sin(w2*t2+fase_2)+(fuerza/m+muDin*9.8)/w2^2;
y=M*s/(m+M)+z;
x0=z-m*s/(m+M);
vY=vZ0+(fuerza-muDin*9.8*M)*t2/(m+M)
+M*amplitud_2*w2*cos(w2*t2+fase_2)/(m+M);
Ax=vY/w1;
Ay=y-fuerza/(m*w1*w1)-x0-d;
amplitud_1=sqrt(Ax^2+Ay^2);
fase_1=atan2(Ay, Ax);
if fase_1<0
fase_1=2*pi+fase_1;
end
t=0.0;
x=x0;
end
end
xx(i)=x;
vc(i)=vX;
yy(i)=y;
vp(i)=vY;
end
figure
plot(xx, vc, yy,vp)
legend('caja','operario', 'location','northwest')
grid on
xlabel('x,y')
ylabel('v_x,v_y')
title('Arrastrando una caja')
figure
plot(0:dt:tf, vc(1:end-1),0:dt:tf, vp(1:end-1))
legend('caja','operario', 'location','northwest')
grid on
xlabel('t')
ylabel('v_x,v_y')
title('Arrastrando una caja')
figure
plot(0:dt:tf, xx(1:end-1),0:dt:tf, yy(1:end-1))
legend('caja','operario', 'location','northwest')
grid on
xlabel('t')
ylabel('x,y')
title('Arrastrando una caja')
La figura muestra la trayectoria en el espacio de las fases x-v, de la caja y del operario cuando el c.m. decelera F< μkMg, su velocidad se hace cero al cabo de cierto tiempo y el sistema de partículas no puede moverse más allá de cierta distancia.
Datos: F=4.5 N, M=1 kg, m=1 kg, k=8 N/m, μs=0.75, μk=0.5, tiempo tf=7.3
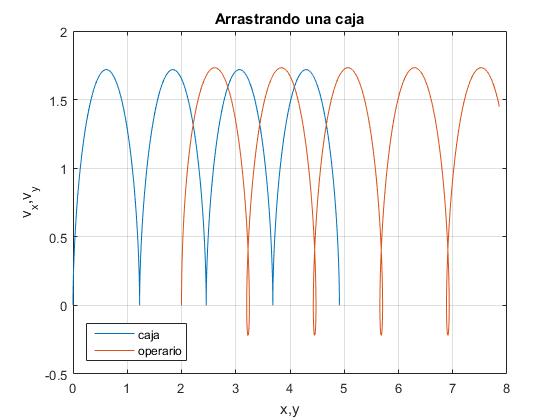
La figura muestra la trayectoria en el espacio de las fases x-v, de la caja y del operario cuando el c.m. se mueve con velocidad constante F=μkMg.
Datos: F=4.9 N, M=1 kg, m=1 kg, k=8 N/m, μs=0.75, μk=0.5, tiempo tf=7.2
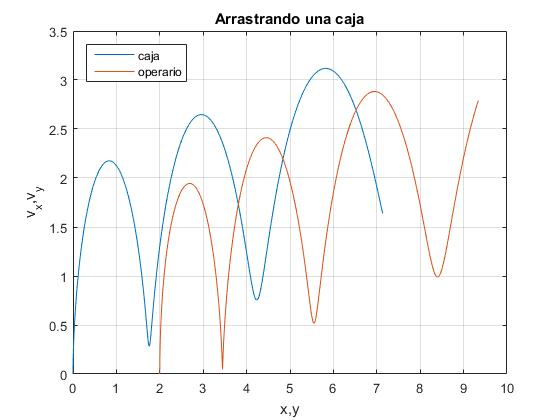
La figura muestra la trayectoria en el espacio de las fases x-v, de la caja y del operario cuando el c.m. acelera F>μkMg.
Datos: F=5.5 N, M=1 kg, m=1 kg, k=8 N/m, μs=0.75, μk=0.5, tiempo tf=5.2
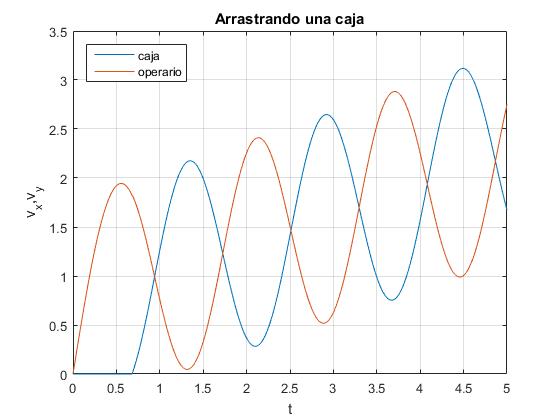
En la figura, se observa la velocidad de la caja y del operario en función del tiempo total tt. Los datos son los de la figura anterior
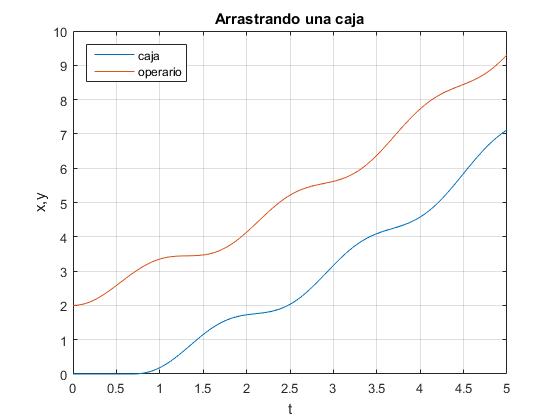
En la figura, se observa la posición de la caja y del operario en función del tiempo total tt. Los datos son los de la figura anterior
Balance energético
La energía del sistema de partículas es la suma de la energía cinética de las dos partículas y de la energía potencial de interacción entre ambas.
El trabajo de las fuerzas exteriores
Wext=F(y-d)- μkMgx
modifica la energía del sistema de partículas
Wext=U-U0
Actividades
Se introduce
-
La fuerza constante F que ejerce el operario, en N, en el control titulado Fuerza
-
La masa m del operario, en kg, en el control titulado Masa
-
La masa M de la caja se ha fijado en 1 kg
-
El coeficiente estático en el control titulado µs
-
El coeficiente cinético en el control titulado µk. Se debe de cumplir que µk≤µs
-
La constante k en N/m, del muelle elástico, en el control titulado Constante.
Se pulsa el botón titulado Nuevo
Los valores críticos de la fuerza F son
-
μsMg/2, para que la caja empiece a deslizar
-
μkMg, para que la caja deslice sin detenerse.
Se simula el movimiento de la caja y del operario, representado por un vehículo, ambos unidos por un muelle elástico.
Se representan mediante flechas, las fuerzas sobre la caja y sobre el operario
En la parte superior, se representa en el espacio de las fases x-v
- En color rojo, la trayectoria de la caja
- En color azul, la trayectoria del operario
En la parte izquierda, se representa el balance energético
La altura de la barra, es el trabajo realizado por la fuerza constante F
- En color azul, la energía cinética del operario
- En color rojo, la energías cinética de la caja.
- En color verde, la energía almacenada en el muelle elástico deformado
- En color negro, el trabajo de la fuerza de rozamiento.