

Modelos de choque
Consideremos la colisión elástica entre una partícula de masa m incidente con velocidad v0 contra otra partícula de masa M que está en reposo.
Por la conservación del momento lineal
Por la conservación de la energía
mv0=mv+MV
La solución de este sistema de dos ecuaciones con dos incógnitas es
Cuando las partículas son idénticas M=m, v=0, y V=v0. La primera partícula permenece en reposo después del choque. Hay un intercambio de momento lineal, la primera se lo cede a la segunda, quedando aquella en reposo.
Modelo de choque elástico
Consideremos una partícula de masa m choca con otra de masa M inicialmente en reposo. Antes del choque, la velocidad de la primera es v0 y la segunda está en reposo.
Cuando las partículas entran en contacto en el instante t=0, consideramos que las partículas son dos partículas unidas por un muelle elástico de constante k y longitud l sin deformar. l=r1+r2 podría ser la distancia inicial entre los centros de dos bolas que chocan. Este ejemplo es similar al tratado en la página titulada Sistema aislado de dos partículas interactuantes
En el instante t, la posición de la partícula de masa m es x y su velocidad disminuye a v=dx/dt, y la posición de la partícula de masa M es y y su velocidad aumenta a V=dy/dt.
Movimiento del centro de masas
En un sistema aislado de dos partículas interactuantes, el centro de masas se mueve con velocidad constante
La posición inicial y la velocidad del centro de masas, t=0
La posición del centro de masas en el instante t
Movimiento relativo de las dos partículas
En el instante t, el muelle se ha deformado l-(y-x) y ejerce fuerzas iguales y de sentido contario sobre ambas partículas. Las ecuaciones del movimiento son.
Multiplicamos la primera por M, la segunda por m y restamos
donde ξ=y-x es la posición relativa de las dos partículas y μ=mM/(m+M) es la masa reducida del sistema formado por las dos partículas. El movimiento relativo de las dos partículas es equivalente al de una partícula de masa reducida μ que describe una oscilación libre
La solución de esta ecuación diferencial, es
Las constantes A y B se determinan a partir de las condiciones iniciales.
la posición inicial de las partículas es x=0, y=l, por lo que ξ=y-x=l. El coeficiente B=0
la velocidad inicial de las partículas es dx/dt=v0, dy/dt=0, por lo que dξ/dt=-v0. El coeficiente A=-v0/ω
El resultado es
Cuando ωt=π, ξ=l. El muelle recupera su longitud inicial sin deformar y-x=l, el choque ha terminado. La duración del choque es t=π/ω. La velocidad final de la partícula de masa reducida es v0
Posiciones
Conocida la posición z=(mx+My)/(m+M) del c.m. y la posición relativa ξ=y-x de las partículas, despejamos la posición x e y de cada una de las partículas en función del tiempo t.
Ejemplo
- Masa de la primera bola, m=0.1 kg
- Velocidad antes del choque, v0=1 m/s
- Masa de la segunda bola, M=0.1 kg
- Velocidad antes del choque, en reposo
- Constante elástica del muelle, k=5·106 N/m
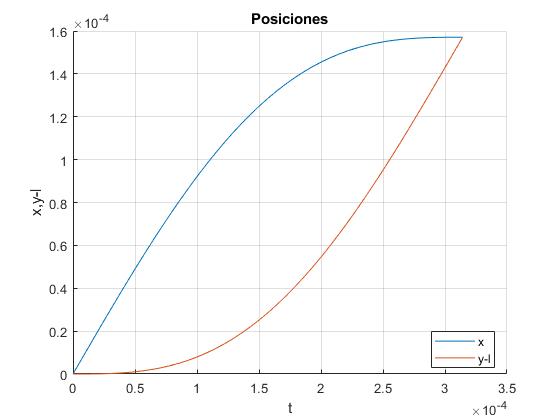
La frecuencia angular ω=10 000 rad/s y la duración del choque, t=0.314 ms
Representamos las posición x del centro de la primera bola y la posición y-l de la segunda
m=0.1; %masa primera bola
M=0.1; %masa segunda bola
v0=1; %velocidad inicial de la primera bola
k=5e6; %constante elástica del muelle
w=sqrt(k*(m+M)/(m*M)); %frecuencia angular
x=@(t) v0*(m*t+M*sin(w*t)/w)/(m+M); %posción x
y=@(t) m*v0*(t-sin(w*t)/w)/(m+M); %posición y-l
hold on
fplot(x,[0,pi/w])
fplot(y,[0,pi/w])
hold off
xlabel('t')
ylabel('x,y-l')
legend('x','y-l','Location','best')
grid on
title('Posiciones')
Velocidades
Derivando respecto del tiempo obtenemos las velocidades
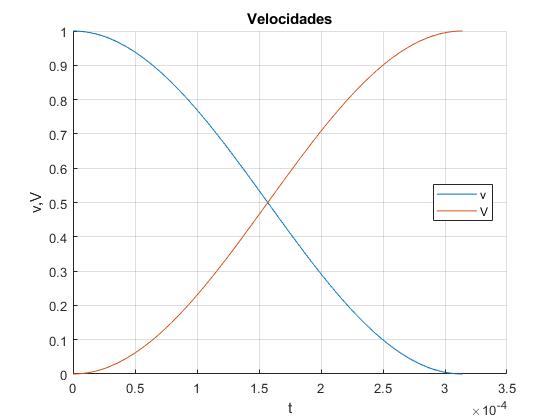
Cuando termina el choque, t=π/ω. Las velocidades son
Resultado que hemos obtenido al principio de la página
Representamos las velocidades v y V en función del tiempo t para el ejemplo anterior
m=0.1; %masa primera bola
M=0.1; %masa segunda bola
v0=1; %velocidad inicial de la primera bola
k=5e6; %constante elástica del muelle
w=sqrt(k*(m+M)/(m*M)); %frecuencia angular
v=@(t) v0*(m+M*cos(w*t))/(m+M);
V=@(t) m*v0*(1-cos(w*t))/(m+M);
hold on
fplot(v,[0,pi/w])
fplot(V,[0,pi/w])
hold off
xlabel('t')
ylabel('v,V')
grid on
legend('v','V','Location','best')
title('Velocidades')
Fuerza
La fuerza que ejerce el muelle deformado sobre cada una de las partículas es k(l-(y-x))
Representamos la fuerza F en función del tiempo t, con los datos del ejemplo
m=0.1; %masa primera bola
M=0.1; %masa segunda bola
v0=1; %velocidad inicial de la primera bola
k=5e6; %constante elástica del muelle
w=sqrt(k*(m+M)/(m*M)); %frecuencia angular
F=@(t) k*v0*sin(w*t)/w;
hold on
fplot(F,[0,pi/w])
hold off
xlabel('t')
ylabel('F')
grid on
title('Fuerza')
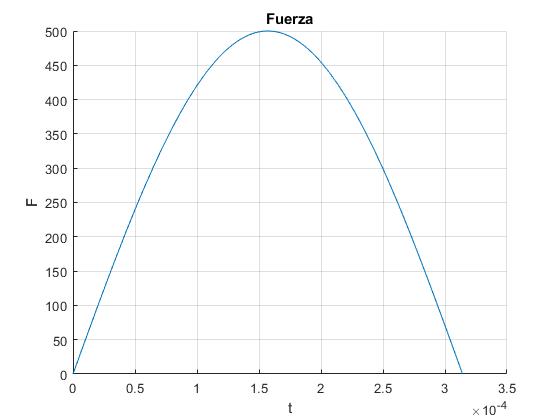
El impulso es el área bajo la curva
La velocidad inicial de la partícula de masa reducida μ es -v0 y la velocidad final es v0, el cambio de momento lineal es 2μv0
Con los datos del ejemplo, el impulso es I=0.1 N·s
El trabajo W de la fuerza que ejece el muelle es nulo. La energía cinética de la partícula de masa reducida no cambia. En un muelle elástico la fuerza y el desplazamiento tiene signos contrarios
Actividades
Se introduce
- la masa m de la primera bola de color azul en kg, en el control titulado Masa m
- la constante k del muelle elástico, en el control titulado Constante
Se ha fijado
- la masa de la segunda bola de color rojo, M=1 kg
- la velocidad de la primera bola, v0=1 m/s
- la segunda bola está inicialmente en reposo
- las dos bolas tiene el mismo radio, 10 cm. La longitud del muelle sin deformar l=0.2 m
Se pulsa el botón titulado Nuevo
Se muestra de forma animada las tres etapas del movimiento de las dos bolas
- La inicial, la primera bola se mueve con velocidad v0 y la segunda está en reposo. Esta etapa termina cuando entran en contacto
- La intermedia, el movimiento de las dos bolas durante el intervalo de tiempo que dura el choque
- La final, las dos bolas se mueven con velocidad constante después del choque
Se observa la bola de color azul moviéndose hacia la derecha, hasta que entra en contacto con la bola de color rojo. Se observa que los centros de las dos bolas están unidos por un muelle de longitud l
Durante el tiempo que dura el choque los centros de las bolas se desplazan y el muelle se deforma. Observamos las fuerzas que ejerce el muelle, iguales y de sentido contrario, sobre el centro de las bolas
Cuando el muelle recupera su longitud inicial l en el instante t=π/ω, observamos las bolas desplazándose con velocidad constante v y V, que son las que se obtienen de las dos ecuaciones que describen el choque elástico
Para que se aprecie las tres etapas del movimiento de las bolas, la constante elástica k del muelle tiene que ser pequeña
En la parte superior, vemos como se distribuye la energía total constante en cada una de las tres etapas del movimiento
Choque completamente inelástico

Consideremos el choque completamente inelástico entre una partícula de masa m incidente con velocidad v0 contra otra partícula de masa M que está en reposo.
Por la conservación del momento lineal
Balance energético
Es la energía que se pierde en la colisión
Movimiento del centro de masas
En un sistema aislado de dos partículas interactuantes, el centro de masas se mueve con velocidad constante
La posición inicial y la velocidad del centro de masas, t=0
La posición del centro de masas en el instante t
Movimiento relativo de las dos partículas
En el instante t, el muelle se ha deformado l-(y-x) y ejerce fuerzas iguales y de sentido contrario sobre ambas partículas. Además, supondremos una fuerza de rozamiento proporcional a la velocidad relativa (dy/dt-dx/dt), como en las oscilaciones amortiguadas
Las ecuaciones del movimiento son
Multiplicamos la primera por M, la segunda por m y restamos
donde ξ=y-x es la posición relativa de las dos partículas y μ=mM/(m+M) es la masa reducida del sistema formado por las dos partículas. El movimiento relativo de las dos partículas es equivalente al de una partícula de masa reducida μ que describe una oscilación amortiguada
Para que las partículas vayan juntas después del choque se requiere que
es decir, que la oscilación sea sobreamortiguada.
La solución de esta ecuación diferencial es
Derivando con respecto del tiempo
Las constantes A y B se determinan a partir de las condiciones iniciales.
la posición inicial de las partículas es x=0, y=l, por lo que ξ=y-x=l. El coeficiente B=0.
la velocidad inicial de las partículas es dx/dt=v0, dy/dt=0, por lo que dξ/dt=-v0. El coeficiente A=-v0/ω
El movimiento relativo se describe mediante la ecuación
Cuando t=0, ξ=l y dξ/dt=-v0. Cuando t→∞, ξ=l y dξ/dt=0
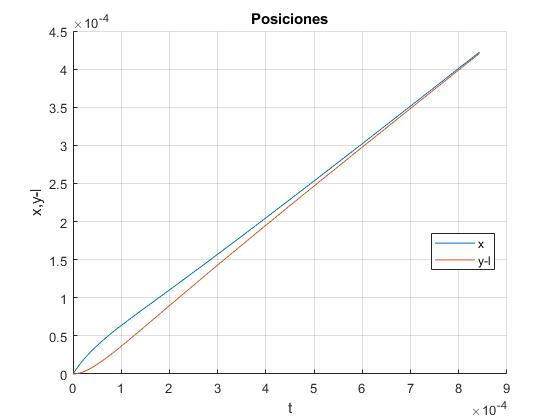
Posiciones
Conocida la posición z=(mx+My)/(m+M) del c.m. y la posición relativa ξ=y-x de las partículas, despejamos la posición x e y de cada una de las partículas en función del tiempo t.
Despejamos x e y
Ejemplo
- Masa de la primera bola, m=0.1 kg
- Velocidad antes del choque, v0=1 m/s
- Masa de la segunda bola, M=0.1 kg
- Velocidad antes del choque, en reposo
- Constante elástica del muelle, k=5·106 N/m
- Coeficiente de amortiguamiento, γ=15 000 s-1
La frecuencia angular ω0=10 000 rad/s. El coeficiente de amortiguamiento γ>ω0 para que la oscilación sea sobreamortiguada
Representamos las posición x del centro de la primera bola y la posición y-l de la segunda
m=0.1; %masa primera bola
M=0.1; %masa segunda bola
v0=1; %velocidad inicial de la primera bola
k=5e6; %constante elástica del muelle
g=15000; %coeficiente de amortiguamiento
w0=sqrt(k*(m+M)/(m*M)); %frecuencia angular, w0 < g (sobreamortiguada)
w=sqrt(g^2-w0^2); %frecuencia angular
x=@(t) v0*(m*t+M*exp(-g*t).*sinh(w*t)/w)/(m+M); %posción x
y=@(t) m*v0*(t-exp(-g*t).*sinh(w*t)/w)/(m+M); %posición y-l
hold on
fplot(x,[0,3*pi/w])
fplot(y,[0,3*pi/w])
hold off
xlabel('t')
ylabel('x,y-l')
legend('x','y-l','Location','best')
grid on
title('Posiciones')
Velocidades
Derivando respecto del tiempo obtenemos las velocidades
Después de un tiempo t→∞, las velocidades después del choque son
Resultado que hemos obtenido al principio de este sección
Representamos las velocidades v y V en función del tiempo t para el ejemplo anterior
m=0.1; %masa primera bola
M=0.1; %masa segunda bola
v0=1; %velocidad inicial de la primera bola
k=5e6; %constante elástica del muelle
g=15000; %coeficiente de amortiguamiento
w0=sqrt(k*(m+M)/(m*M)); %frecuencia angular, w0 < g (sobreamortiguada)
w=sqrt(g^2-w0^2); %frecuencia angular
v=@(t) v0*(m+M*exp(-g*t).*(-g*sinh(w*t)+w*cosh(w*t))/w)/(m+M);
V=@(t) m*v0*(1-exp(-g*t).*(-g*sinh(w*t)+w*cosh(w*t))/w)/(m+M);
hold on
fplot(v,[0,3*pi/w])
fplot(V,[0,3*pi/w])
hold off
xlabel('t')
ylabel('v,V')
grid on
legend('v','V','Location','best')
title('Velocidades')
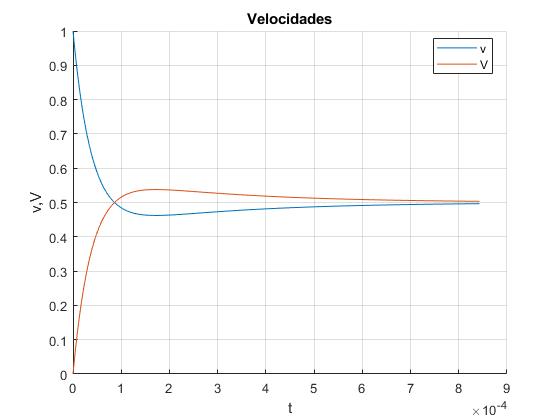
Como m=M, las velocidades finales tienden a, v∞=V∞=v0/2
Fuerza
La fuerza que ejerce el muelle deformado sobre cada una de las partículas es
Representamos la fuerza F en función del tiempo t, con los datos del ejemplo
m=0.1; %masa primera bola
M=0.1; %masa segunda bola
mu=m*M/(m+M); %masa reducida
v0=1; %velocidad inicial de la primera bola
k=5e6; %constante elástica del muelle
g=15000; %coeficiente de amortiguamiento
w0=sqrt(k*(m+M)/(m*M)); %frecuencia angular, w0 < g (sobreamortiguada)
w=sqrt(g^2-w0^2); %frecuencia angular
F=@(t) -k*v0*exp(-g*t).*sinh(w*t)/w-2*mu*g*v0*exp(-g*t).*
(-g*sinh(w*t)+w*cosh(w*t))/w;
hold on
fplot(F,[0,3*pi/w])
hold off
xlabel('t')
ylabel('F')
grid on
title('Fuerza')
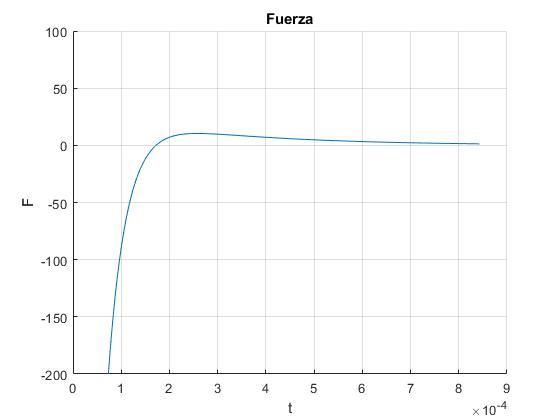
Impulso
Se integra por partes, el valor del integrando para el límite superior es cero, ya que γ>ω. Solamente tenemos que calcular el valor del integrando para el límite inferior, t=0. Calculamos el integrando con la ayuda de Math Symbolic de MATLAB
>> syms t g w;
>> assume(g,'positive')
>> assume(w,'positive')
>> assume(g>w)
>> int(exp(-g*t)*sinh(w*t),t)
ans =-(exp(- g*t - t*w)*(w - g + g*exp(2*t*w) + w*exp(2*t*w)))/(2*(g^2 - w^2))
>> simplify(ans)
ans =-(exp(-t*(g + w))*(w - g + g*exp(2*t*w) + w*exp(2*t*w)))/(2*(g^2 - w^2))
>> latex(ans)
ans = '-\frac{{\mathrm{e}}^{-t\,\left(g+w\right)}\,\left(w-g+g\,
{\mathrm{e}}^{2\,t\,w}+w\,{\mathrm{e}}^{2\,t\,w}\right)}{2\,\left(g^2-w^2\right)}'
Copiamos el código y lo pegamos en MathType
Calculamos su valor cambiado de signo para t=0
El resultado final es
La velocidad inicial de la partícula de masa reducida μ es -v0 y la velocidad final es 0, el cambio de momento lineal es μv0
Trabajo
Calculamos el trabajo W de la fuerza F que ya no es nulo, ya que la energía cinética de la partícula de masa reducida cambia
El cálculo a mano es intenso por lo que procedemos del mismo modo que para el cálculo del impulso
El primer término vale
El segundo término
El resultado es
La velocidad inicial de la partícula de masa reducida μ es -v0 y la velocidad final es 0, su energía cinética disminuye
Actividades
Se introduce
- la masa m de la primera bola de color azul en kg, en el control titulado Masa m
- la constante γ de amortiguamiento, en el control titulado Constante. Para que la oscilación sea sobreamortiguada γ>ω0. Se proporciona este dato en la parte superior derecha
Se ha fijado
- la masa de la segunda bola de color rojo, M=1 kg
- la velocidad de la primera bola, v0=1 m/s
- la segunda bola está inicialmente en reposo
- las dos bolas tiene el mismo radio, 10 cm. La longitud del muelle sin deformar l=0.2 m
- la constante del muelle elástico, k=100 N/m
Se pulsa el botón titulado Nuevo
Se muestra de forma animada las tres etapas del movimiento de las dos bolas
- La inicial, la primera bola se mueve con velocidad v0 y la segunda está en reposo. Esta etapa termina cuando entran en contacto
- La intermedia, el movimiento de las dos bolas durante el intervalo de tiempo que dura el choque
- La final, las dos bolas se mueven con velocidad constante después del choque
Se observa la bola de color azul moviéndose hacia la derecha, hasta que entra en contacto con la bola de color rojo. Se observa que los centros de las dos bolas están unidos por un muelle de longitud l
Durante el tiempo que dura el choque los centros de las bolas se desplazan y el muelle se deforma. Observamos las fuerzas que ejerce el muelle, iguales y de sentido contrario, sobre el centro de las bolas
Cuando el muelle recupera su longitud inicial l en el instante t→∞, observamos las bolas desplazándose con velocidad constante v y V, que son las que se obtienen de las dos ecuaciones que describen el choque elástico
En la parte superior, vemos como se distribuye la energía total en cada una de las tres etapas del movimiento. En color negro, la energía disipada
Referencias
Rod Cross. Impact force between two colliding billiard balls. Phys. Educ. 55 (2020) 065002
Jonathan Bougie, Asim Gangopadhyaya. Conservation laws and energy transformations in a class of common physics problems. Am. J. Phys. 87 (11), November 2019, pp. 868-874. Sec. II, B1. KE dissipation in collision