

Un modelo de colisiones inelásticas
Choque de dos partículas iguales
Dos partículas iguales se mueven en la misma dirección y en sentido contrario con velocidad u. Después del choque su velocidad es v

Las velocidades de los cuerpos v1=-v y v2=v después del choque están relacionadas con las velocidades u1=u y u2=-u antes del choque mediante la definición del coeficiente de restitución e.
v1-v2=-e(u1-u2)
-2v=-e(2u),
La velocidad v de los cuerpos después del choque disminuye ya que el coeficiente de restitución e<1.
v=e·u
Consideremos los cuerpos tienen una estructura interna, formada por dos partículas de masas m y M unidas por un muelle elástico de constante k y longitud l sin deformar.

La partícula de masa M del primer cuerpo choca elásticamente con la partícula de masa M del segundo cuerpo. Inmediatamente después del choque, dichas partículas cambian la dirección de su velocidad.
La situación inicial del sistema de partículas inmediatamente después del choque se muestra en la figura, la partícula de masa M se mueve hacia la derecha con velocidad u y la partícula de masa m se mueve hacia la izquierda con velocidad –u. Ambas partículas están separadas una distancia l, la longitud del muelle sin deformar.
Vamos a examinar el movimiento posterior de este sistema aislado: El centro de masas (c.m.) se mueve con velocidad constante. Las partículas se mueven bajo la acción de las fuerzas interiores o de interacción mutua.
Movimiento del centro de masas
La posición inicial y velocidad del c.m. son respectivamente
En un sistema aislado el c.m. se mueve con velocidad constante
Como la velocidad inicial del c.m. es u antes del choque y la velocidad del c.m. después del choque es v=(M-m)u/(M+m) el coeficiente de restitución vale
Movimiento relativo de las dos partículas
En un instante t la posición de la partícula de masa m (color rojo) es x y la posición de la partícula de masa M (color azul) es y.
La fuerza interna que actúa sobre cada una de las dos partículas es F=k(l-(x-y)). Donde (x-y) es la longitud del muelle deformado y l es la longitud del muelle sin deformar. Como no actúa ninguna fuerza exterior sobre el sistema de dos partículas, el sistema es aislado.
En la figura se muestra:
- En la parte superior, la situación inicial en el instante t=0.
- En la parte intermedia, cuando el muelle está comprimido. Como (x-y) es menor que l, la fuerza F es positiva para la partícula de la derecha (de masa m) y es negativa para la partícula de la izquierda (de masa M).
- En la parte inferior, cuando el muelle está estirado. Como (x-y) es mayor que l, la fuerza F es negativa para la partícula de la derecha (de masa m) y es positiva para la partícula de la izquierda (de masa M).
Las ecuaciones del movimiento son por tanto,
Multiplicando la primera ecuación diferencial por M y la segunda por m y restando ambas ecuaciones diferenciales obtenemos.
o bien,
donde ξ=x-y es la posición relativa de las dos partículas. Teniendo en cuenta la definición de masa reducida μ=mM/(m+M) del sistema formado por las dos partículas llegamos a la siguiente ecuación diferencial.
La solución de esta ecuación diferencial, como puede comprobarse por simple sustitución es
Las constantes A y B se determinan a partir de las condiciones iniciales.
- la posición inicial de las partículas es x=l, y=0, por lo que ξ=x-y=l.
- la velocidad inicial de las partículas es dx/dt=-u, dy/dt=u, por lo que dξ/dt=-2u
Conocemos la posición z=(mx+My)/(m+M) del c.m. y la posición relativa ξ=x-y de las partículas en función del tiempo t.
Despejamos x e y de este sistema de dos ecuaciones con dos incógnitas
Comprobamos que en el instante t=0, las posiciones iniciales son x=l, y=0.
Las velocidades de las partículas en cualquier instante t son
Energías del sistema de partículas
La energía inicial de las partículas es solamente cinética, el muelle está sin deformar
La energía del sistema de partículas en el instante t es
Teniendo en cuenta que la deformación del muelle es l-(x-y). La energía potencial de interacción entre las dos partículas es
La energía total U del sistema de partículas es la suma de ambas contribuciones
que es la energía inicial del sistema de partículas. En un sistema aislado la energía total U se mantiene constante.
Sucesivos choques
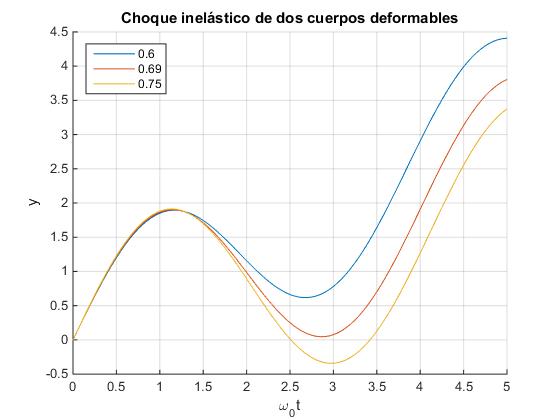
Los cuerpos volverán a chocar cuando la partícula de masa M regrese al origen, es decir, cuando y=0. El instante t0 en el que ocurre, se obtiene resolviendo la ecuación transcendente
En la figura se representa y (eje vertical) en función de ω0t (eje horizontal), para tres valores de α, 0.6, 0.69 y 0.75. Para el primer valor de α, la partícula .
wt=0:0.05:5;
hold on
for alfa=[0.6,0.69,0.75]
y=(1-alfa)*wt*sqrt((1+alfa)/alfa)+2*alfa*sin(wt*sqrt((1+alfa)/alfa));
plot(wt,y, 'displayName',num2str(alfa))
end
hold off
grid on
legend('-DynamicLegend','location','northwest')
xlabel('\omega_0t')
ylabel('y')
title('Choque inelástico de dos cuerpos deformables')
El valor crítico de αc, se obtiene haciendo iguales a cero, la función y su derivada.
Eliminando ω0t en el sistema de dos ecuaciones llegamos a la ecuación trascendente en α.
>> f=@(x) (1-x)*(pi+acos((1-x)/(2*x)))-sqrt(3*x^2+2*x-1); >> fplot(f,[0,1]) >> grid on >> fzero(f,[0.6,0.8]) ans = 0.6971
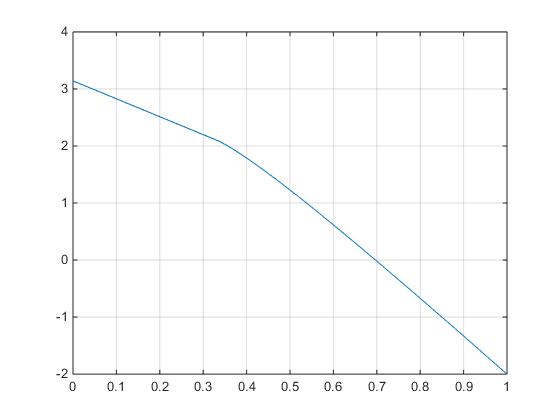
La raíz es αc=0.6971
- Cuando α< αc solamente se produce un choque entre las partículas de masa M de cada uno de los cuerpos.
- Cuando α>αc se produce más de un choque entre las partículas de masa M de cada uno de los cuerpos.
En dicho instante la posición de las partículas es
La partícula de masa M (color azul) choca elásticamente con la correspondiente del otro cuerpo y cambia el signo de dicha velocidad.
Tenemos que estudiar la dinámica del sistema de dos partículas con las condiciones iniciales especificadas para el instante t0.
Movimiento del centro de masas
La posición inicial y velocidad del c.m. son respectivamente
En un sistema aislado el c.m. se mueve con velocidad constante
Movimiento de las partículas
La ecuación del movimiento relativo de las dos partículas la hemos deducido en la sección anterior. Su solución es
Las constantes A y B se determinan a partir de las condiciones iniciales, que en este caso son diferentes.
la posición de las partículas es x=x0, y=0, por lo que ξ=x-y=x0.
la velocidad inicial de las partículas es dx/dt=v0x, dy/dt=v0y, por lo que dξ/dt= v0x-v0y.
Conocemos la posición z=(mx+My)/(m+M) del c.m. y la posición relativa ξ=x-y de las partículas en función del tiempo t. Despejamos x e y de este sistema de dos ecuaciones con dos incógnitas
Estas son las ecuaciones generales del movimiento del sistema de dos partículas después del choque. Las ecuaciones de la primera sección se deducen poniendo t0=0, x0=l, v0x=-u, v0y=u.
El instante en el que tiene lugar el próximo choque, si es que existe se obtiene resolviendo la ecuación trascendente y=0.
Actividades
Se introduce:
- El cociente m/M de las masas de las partículas, m es la masa de la partícula de color rojo y M la masa de la partícula de color azul, en el control titulado Cociente m/M
- La constante k del muelle elástico, en el control titulado Constante muelle.
- La longitud l del muelle sin deformar se ha fijado en 0.25 m.
- La velocidad inicial de las dos partículas se ha fijado en -1.0.
Se pulsa el botón titulado Nuevo.
Se observa el movimiento del sistema formado por dos partículas unidas por un muelle elástico. En la parte superior, observamos que la energía del sistema de partículas suma de:
- La energía cinética de la primera partícula (de color azul)
- La energía cinética de la segunda partícula (de color rojo)
- La energía potencial elástica del muelle deformado (color gris)
Referencias
Aguirregabiria J. M., Hernández A., Rivas M. A simple model for inelastic collisions. Am. J. Phys. 76 (11) November 2008, pp. 1071-1073.