

Un péndulo simple situado sobre una plataforma móvil
El péndulo simple
Supongamos que un péndulo simple de masa m y de longitud l se desvía un ángulo θ0 de la posición de equilibrio y se suelta.
Principio de conservación de la energía
Aplicamos el principio de conservación de la energía para calcular la velocidad de la partícula cuando el péndulo se encuentra en la posición angular θ.
Establecemos el nivel cero de energía potencial en el eje de giro O
Como la partícula describe un movimiento circular de radio l, la velocidad v=l(dθ/dt).
Segunda ley de Newton
En la figura, se muestran las fuerzas que actúan sobre la partícula de masa m y las componentes tangencial at= l(d2θ/dt2) y normal an=v2/l =l(dθ/dt)2 de su aceleración.
Aplicamos la segunda ley de Newton
mat=-mg·sinθ
man=T-mg·cosθ
La primera ecuación se escribe en forma diferencial
Se resuelve esta ecuación diferencial de segundo orden por procedimientos numéricos, con las condiciones iniciales t=0, θ=θ0, (dθ/dt)=0
La segunda ecuación, nos permite calcular la tensión de la cuerda T conocida la velocidad v de la partícula. La velocidad v se calcula aplicando el principio de conservación de la energía
El péndulo situado sobre una plataforma móvil que desliza sobre un plano horizontal
La plataforma y el péndulo constituyen un sistema aislado. Supongamos que inicialmente el péndulo se encuentra en la posición de equilibrio, en reposo, encima del centro de masas del la plataforma. Su proyección sobre el eje horizontal X señala el origen O. Así pues, el origen O es la posición del centro de masas del sistema aislado que permanecerá en reposo si inicialmente lo estaba.
La posición del centro de masas del sistema es el origen Xc=0
Supongamos que el péndulo se desplaza de la posición de equilibrio un ángulo θ0 hacia la derecha.
-
La posición del c.m. de la plataforma es xb.
-
La posición de la partícula es xp=-xb+l·sinθ.
-
La posición del centro de masas es Xc=0
La relación entre la posición angular θ del péndulo y la posición del c.m. de la plataforma xb es
La velocidad del centro de masas del sistema es Vc=0
Las componentes de la velocidad de la partícula, respecto del observador inercial situado en el plano horizontal, son
horizontal: vcosθ+Vb
vertical: v·sinθ
La relación entre la velocidad v de la partícula y la velocidad Vb de la plataforma es
Se obtiene derivando la relación entre la posición angular θ del péndulo y la posición del c.m. de la plataforma xb
Principio de conservación de la energía
Si establecemos el nivel cero de energía potencial en el eje de giro del péndulo. El principio de conservación de la energía se escribe, véase figura anterior.
Sustituimos Vb en función de v y despejamos v=l(dθ/dt)
La aceleración del centro de masas del sistema es ac=0
Las componentes horizontal y vertical de la aceleración de la partícula, respecto del observador inercial situado en el plano horizontal, son
atcosθ-ansinθ+ab
ancosθ+atsinθ
La relación entre las componentes tangencial at y normal an de la aceleración de la partícula y la aceleración ab de la plataforma es
Segunda ley de Newton
Las fuerzas sobre la partícula son
- La tensión T
- El peso mg
- La tensión T de la cuerda
- El peso de la plataforma y la reacción del plano horizontal no contribuyen al movimiento
Las componentes tangencial y radial de la aceleración de la partícula, respecto del observador inercial situado en el plano horizontal, son
at+ab·cosθ
an-ab·sinθ
La ecuación del movimiento en la dirección tangencial es
m(at+ab·cosθ)=-mgsinθ
La ecuación del movimiento en la dirección normal es
m(an-ab·sinθ)=T- mgcosθ
La ecuación del movimiento de la plataforma es
T·sinθ=Mab
Sustituimos ab y teniendo en cuenta que an=l(dθ/dt)2 y at= l(d2θ/dt2) llegamos a la siguiente ecuación diferencial de segundo orden
Que se resuelve por procedimientos numéricos con las siguientes condiciones iniciales
t=0, θ=θ0, (dθ/dt)=0
Cuando la masa M de la plataforma es muy grande comparada con la masa m de la partícula, m/M→0 obtenemos la ecuación diferencial del movimiento del péndulo.
Vamos a comprobar si es correcta la ecuación diferencial del movimiento.
La aplicación del principio de conservación de la energía nos proporciona la ecuación diferencial de primer orden
Derivamos esta ecuación respecto del tiempo
y volvemos a obtener la ecuación diferencial del movimiento
Tensión de la cuerda
Despejamos la tensión de la cuerda
Conocida la velocidad angular de rotación (dθ/dt), obtenemos T
Ejemplo: supongamos que el péndulo se desvía θ0=90º y se suelta. Cuando pasa por la posición de equilibrio θ=0, la tensión de la cuerda es
Algo mayor que cuando la plataforma está fija T/(mg)=3
Cuando la masa M de la plataforma es muy grande comparada con la masa m de la partícula, m/M→0 obtenemos
Ejemplo
- Masa de la plataforma M=2 kg, masa de la partícula m=1 kg, de modo que el cociente M/m=2.0
- Longitud del péndulo, l=1.0 m
- Ángulo inicial de desviación del péndulo θ0=90º
El bloque se desvía hacia la izquierda, a fin de que la posición del c.m. del sistema aislado permanezca en el origen
Calcular la posición xb del bloque, la velocidad v de la partícula, la velocidad Vb de la plataforma y la tensión T de la cuerda cuando θ=30º
La conservación del momento lineal y de la energía nos proporcionan las dos ecuaciones que nos permiten calcular v y Vb.
v=-4.75 m/s, Vb=1.37 m/s
La tensión T de la cuerda se calcula mediante el par de ecuaciones
T·sinθ=Mab
m(an-ab·sinθ)=T- mgcosθ
T·sin30º=2·ab
1(4.752/1.0-ab·sin30º)=T- 1·9.8·cos30º
Eliminando la aceleración ab de la plataforma, despejamos T=27.66 N
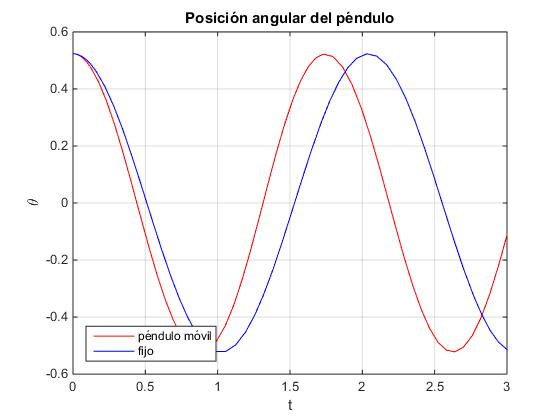
Comparación
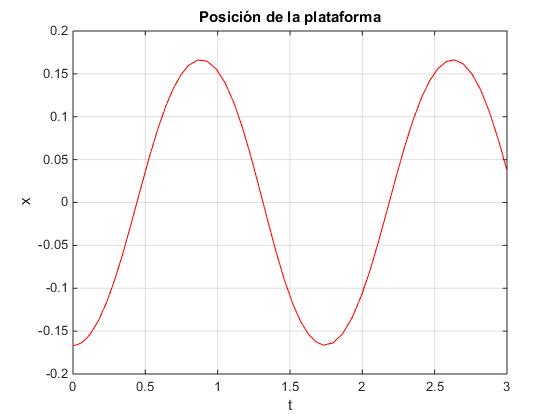
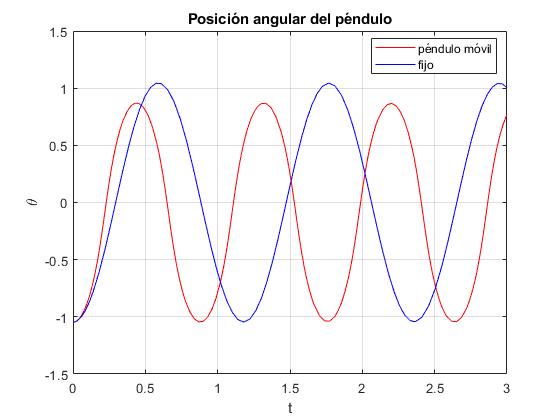
La figura muestra, la comparación entre las oscilaciones de un péndulo (en color azul) y la del mismo péndulo montado en una plataforma móvil (en color rojo) cuya masa es M/m=2. El péndulo se suelta desde la posición θ0=π/6 (30°)
M=2; %relación M/m (plataforma/péndulo)
w2=9.8/1.0; %cuadrado de la frecuencia angular del péndulo simple
%péndulo móvil
f=@(t,x) [x(2);-(w2*(M+1)*sin(x(1))+sin(2*x(1))*x(2)/2)/(M+sin(x(1))^2)];
tspan=[0 3];
[t,x]=ode45(f,[0,3],[pi/6,0]);
%péndulo fijo
g=@(t,x) [x(2);-w2*sin(x(1))];
[tt,xx]=ode45(g,[0,3],[pi/6,0]);
plot(t,x(:,1),'r',tt,xx(:,1),'b')
legend('péndulo móvil','fijo', 'location','southwest')
grid on
xlabel('t')
ylabel('\theta');
title('Posición angular del péndulo')
figure
y=-sin(x(:,1))/(1+M);
plot(t,y,'r')
grid on
xlabel('t')
ylabel('x');
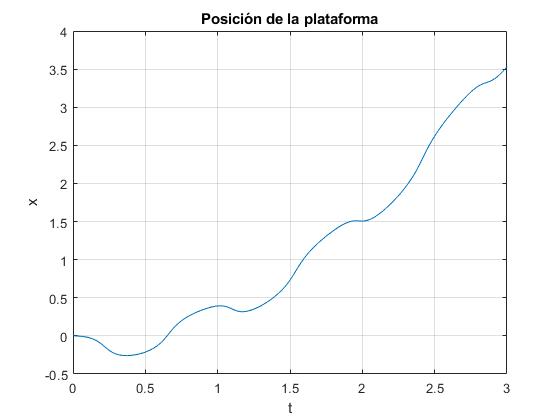
title('Posición de la plataforma')
La figura muestra la posición de la plataforma xb en función del tiempo.
Actividades
Se introduce
- El ángulo inicial θ0,, en el control titulado Desviación
- El cociente masa de la plataforma, masa de la partícula M/m, en el control titulado Cociente M/m
- La longitud del péndulo se ha fijado en l=1 m.
Se pulsa el botón titulado Nuevo.
Se observa el movimiento del péndulo y de la plataforma
Se sugiere, comparar el comportamiento del péndulo, cuando la masa de la plataforma M es del orden de la masa del péndulo m y cuando es mucho mayor. Por ejemplo, M/m=2 y cuando M/m=100.En la parte superior, se proporcionan los datos relativos al tiempo t y:
- al péndulo: ángulo de desviación θ, velocidad angular dθ/dt y tensión T de la cuerda.
- a la plataforma: posición xb y velocidad Vb
Ecuaciones de Lagrange
- La posición de la plataforma móvil de masa M es x
- La posición de la masa puntual m es (x+lsinθ, lcosθ)
Si el centro de masas está situado el origen, relacionamos la posición de la plataforma x con el ángulo de desviación del péndulo θ,
m(x+lsinθ)+Mx=0
Derivando respecto al tiempo, obtenemos la velocidad de la plataforma y su energía cinética T1
y de la masa puntual m y su energía cinética T2
La energía potencial de la masa puntual es
La lagrangiana L=T1+T2-V es
La ecuación del movimiento es
Obtenemos la misma ecuación que en los apartados anteriores
Oscilaciones de pequeña amplitud
Cuando el ángulo θ es pequeño, la lagrangiana L y la ecuación del movimiento se simplifican notablemente
Se trata de la ecuación diferencial de un Movimiento Armónico Simple de frecuencia angular
Si la masa M de la plataforma móvil es muy grande, obtenemos la frecuencia angular ω del movimiento oscilatorio de un péndulo de longitud l
El péndulo situado sobre una plataforma móvil que desliza sobre un plano inclinado
Una plataforma de masa M desliza sin rozamiento a lo largo de un plano inclinado de ángulo α. El cuerpo está unido a una partícula de masa m mediante un hilo inextensible y de masa despreciable de longitud l. Se separa el hilo de la posición vertical y se suelta y a la vez se libera la plataforma. Se trata de describir el movimiento de la plataforma a lo largo del plano inclinado y el movimiento del péndulo respecto de dicho cuerpo.
La posición de la plataforma y de la partícula en el instante t
Las componentes de la velocidad son
La energía cinética del sistema es
La energía potencial del sistema tomando el origen como nivel cero es
La lagrangiana L=Ek-Ep y las ecuaciones del movimiento
Tenemos un sistema de dos ecuaciones diferenciales, despejamos d2s/dt2 y d2θ/dt2
Cuando el plano es horizontal, α=0
La segunda ecuación diferencial coincide con el apartado anterior. Verificamos la primera a partir de la relación entre s o xb y el ángulo θ
derivando dos veces con respecto del tiempo
Ejemplo
- Masa de la plataforma M=0.5 kg, masa de la partícula m=1 kg, de modo que el cociente M/m=0.5
- Longitud del péndulo, l=0.3 m
- Ángulo inicial de desviación del péndulo θ0=-π/3 (-60º)
- Ángulo del plano inclinado, α=5°
Representamos la posición angular θ del péndulo móvil en función del tiempo y lo comparamos con la posición angular de un péndulo fijo similar. Representamos la posición de la plataforma s a lo largo del plano inclinado
M=0.5; %relación M/m
l=0.3; %longitud del péndulo
w2=9.8/l; %es el cuadrado de la frecuencia angular del péndulo simple
alfa=5*pi/180; %ángulo del plano inclinado
%s es x(1) ds/dt es x(2), th es x(3), dth/dt es x(4)
f=@(t,x) [x(2); l*(x(4)^2*sin(alfa+x(3))+w2*(sin(x(3))*cos(alfa+x(3))
+(1+M)*sin(alfa)))/(M+sin(alfa+x(3))^2); x(4);
-(x(4)^2*sin(alfa+x(3))*cos(alfa+x(3))+(1+M)*w2*(sin(x(3))+sin(alfa)*
cos(alfa+x(3))))/(M+sin(alfa+x(3))^2)];
[t,x]=ode45(f,[0,3],[0,0,-pi/3,0]);
%péndulo fijo
g=@(t,x) [x(2);-w2*sin(x(1))];
[tt,xx]=ode45(g,[0,3],[-pi/3,0]);
plot(t,x(:,3),'r',tt,xx(:,1),'b')
legend('péndulo móvil','fijo', 'location','best')
grid on
xlabel('t')
ylabel('\theta');
title('Posición angular del péndulo')
figure
plot(t,x(:,1))
grid on
xlabel('t')
ylabel('x');
title('Posición de la plataforma')
Verificamos la conservación de la energía
La energía inicial cuando la plataforma se encuentra en reposo en el origen s=0 y el péndulo se ha desviado θ0 de la dirección vertical
E0=-mglcosθ0
>> E=(1+M)*x(:,2).^2/2+(l^2*x(:,4).^2+2*l*x(:,2).*x(:,4).*cos(alfa+x(:,3)))/2-
(1+M)*9.8*x(:,1)*sin(alfa)-9.8*l*cos(x(:,3))
-1.4700
-1.4700
....
-1.4661
-1.4661
>> -9.8*l*cos(-pi/3)
ans = -1.4700
Actividades
Se introduce
- El ángulo del plano inclinado α, en el control titulado ¨Ángulo
- El ángulo inicial θ0,, en el control titulado Desviación
- El cociente masa de la plataforma, masa de la partícula M/m, en el control titulado Cociente M/m
- La longitud del péndulo se ha fijado en l=0.3 m.
Se pulsa el botón titulado Nuevo.
Se observa el movimiento del péndulo y de la plataforma
En la parte superior, se proporcionan los datos relativos al tiempo t y
- al péndulo: ángulo de desviación θ, velocidad angular dθ/dt
- a la plataforma: posición s, y velocidad ds/dt
El programa calcula en cada instante el tanto por ciento de error relativo en la energía o el cociente
donde E es la energía del sistema en cualquier instante t, y E0 es la energía inicial del sistema.
Este valor se proporciona en caracteres de color rojo en la parte inferior izquierda. Su valor debe ser siempre cero, o un valor muy pequeño lo que indica que la energía del sistema permanece constante y el programa realiza los cálculos correctamente.
Referencias
Physics challenges for teachers and students (Solutions to November 2004), The Physics Teacher 43 (2005), pp. s2-s3.
David Morin. Chapter 5. The Lagrangian Method. 2002