

Sistemas de dos o más partículas (I)
Una esfera situada sobre dos bloques que deslizan en un plano horizontal
Una esfera de masa m y radio R descansa sobre dos bloques de masa m cada uno y de altura R que pueden deslizar sobre un plano horizontal sin rozamiento.
Cuando los dos bloques están juntos la esfera está en equilibrio inestable, se separan un poco y la esfera se mueve hacia abajo empujando a los bloques a uno y otro lado, tal como se muestra en la figura.
En la figura, se muestran las fuerzas sobre la esfera
- El peso mg
- La fuerza que ejercen los bloques sobre la esfera, N
La ecuación del movimiento de la esfera a lo largo del eje Y es
may=2Nsinθ-mg
Como los bloques se mueven a lo largo del plano horizontal sin rozamiento, la esfera ejerce una fuerza horizontal Ncosθ sobre cada uno de los bloques. La ecuación del movimiento de cada bloque es
max=Ncosθ
ax es la aceleración de los bloques y ay es la aceleración del centro de la esfera
Conservación de la energía
Por otra parte, el sistema es conservativo y la energía permanece constante
y=R es la altura inicial del centro de la esfera
Posiciones
- La posición de un bloque es x
- La posición del centro de la esfera es y
Ambas posiciones están relacionadas, x2+y2=R2
Velocidades
Las velocidades también están relacionadas
En la ecuación de la conservación de la energía despejamos la velocidad vy
Utilizando la relación entre vx y vy, despejamos vx
Aceleraciones
Conocida la velocidad vy, calculamos la aceleración ay del centro de la esfera
Conocida la velocidad vx, calculamos la aceleración ax de cada uno de los bloques
La aceleración ax se anula y por tanto, la reacción N a la altura y0, raíz de la ecuación cúbica
Esta ecuación es de la forma x3+ax2+bx+c=0, a=0, b=3, c=-2, con x=y/R
Utilizamos la función
function esfera
raiz=raices_3([1,0,3,-2]);
disp(raiz)
function x = raices_3(p)
Q=(p(2)*p(2)-3*p(3))/9;
R=(2*p(2)^3-9*p(2)*p(3)+27*p(4))/54;
x=zeros(3,1); %reserva memoria para un vector de tres elementos
if (R*R)<(Q^3)
tetha=acos(R/sqrt(Q^3));
x(1)=-2*sqrt(Q)*cos(tetha/3)-p(2)/3;
x(2)=-2*sqrt(Q)*cos((tetha+2*pi)/3)-p(2)/3;
x(3)=-2*sqrt(Q)*cos((tetha-2*pi)/3)-p(2)/3;
else
A=-sign(R)*nthroot(abs(R)+sqrt(R*R-Q^3),3);
if A==0
B=0;
else
B=Q/A;
end
x(1)=(A+B)-p(2)/3;
x(2)=-(A+B)/2-p(2)/3+(sqrt(3)*(A-B)/2)*sqrt(-1); %mejor que i
x(3)=-(A+B)/2-p(2)/3-(sqrt(3)*(A-B)/2)*sqrt(-1);
end
end
end
0.5961 + 0.0000i -0.2980 + 1.8073i -0.2980 - 1.8073i
La raíz real es y0/R=0.5961
Obtenemos la raíz real utilizando Math Symbolic de MATLAB
a=sym(0); b=sym(3); c=sym(-2); P=b-a^2/3; Q=a*b/3-c-2*a^3/27; v3=-Q/2+sqrt((Q/2)^2+(P/3)^3); %una de las raíces, la otra con (-) v=zeros(0,3); k=sym(0:2); v=abs(v3)^(1/3)*exp(1i*(angle(v3)+k*2*pi)/3); u=P./(3*v); x=u-v; %raíces de la ecuación reducida z=x-a/3 %raíces de la ecuación de tercer grado
z =[1/(2^(1/2) - 1)^(1/3) - (2^(1/2) - 1)^(1/3), - ((3^(1/2)*1i)/2 - 1/2)*(2^(1/2) - 1)^(1/3) + 1/(((3^(1/2)*1i)/2 - 1/2) *(2^(1/2) - 1)^(1/3)), ((3^(1/2)*1i)/2 + 1/2)*(2^(1/2) - 1)^(1/3) - 1/ (((3^(1/2)*1i)/2 + 1/2)*(2^(1/2) - 1)^(1/3))]
La raíz real está en la primera fila
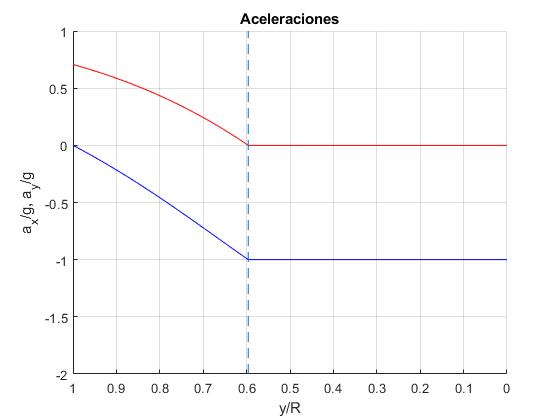
Para y≤y0, la reacción N es cero y la esfera cae libremente, bajo la acción únicamente de su propio peso
Representamos ax/g (color rojo) y ay/g (color azul) en función de y/R en el intervalo [1,0]. La línea vertical corresponde a y0/R, posición en la que ax=0, N=0, a partir de esta posición y≤y0, las aceleraciones ax=0 y ay=-g
R=1;
hold on
y0=((1+sqrt(2))^(1/3)-1/(1+sqrt(2))^(1/3))*R;
ax=@(y) -(2-3*y-y.^3)./(1+y.^2).^(3/2);
fplot(ax,[y0,1], 'color','r');
line([0,y0],[0,0],'color','r')
ay=@(y) (-1-4*y+4*y.^2+y.^4)./(1+y.^2).^2;
fplot(ay,[y0,1], 'color','b');
line([0,y0],[-1,-1],'color','b')
line([y0,y0],[-2,1],'LineStyle','--')
hold off
set(gca, 'XDir','reverse')
xlabel('y/R')
ylabel('a_x/g, a_y/g')
grid on
title('Aceleraciones')
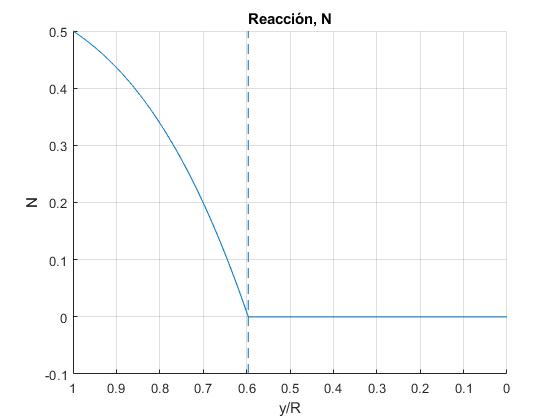
Representamos la reacción N en función de y/R
y0=((1+sqrt(2))^(1/3)-1/(1+sqrt(2))^(1/3))*R;
ay=@(y) (-1-4*y+4*y.^2+y.^4)./(1+y.^2).^2;
N=@(y) (ay(y)+1)*R./(2*y);
fplot(N,[y0,1]);
line([0,y0],[0,0])
line([y0,y0],[-0.1,0.5], 'lineStyle','--')
set(gca, 'XDir','reverse')
xlabel('y/R')
ylabel('N')
grid on
title('Reacción, N')
Comprobación, cuando ax=0, es decir, y3+3R2y-2R3=0, entonces ay=-g
Etapas del movimiento
En el intervalo y0<y<R la aceleración del centro de la esfera es ay y la del bloque ax
En el intervalo, 0<y<y0, la aceleración del centro de la esfera es -g y el bloque se mueve con velocidad constante
Integramos la ecuación diferencial por procedimientos numéricos
Con la siguiente condición inicial, en el instante t=0, el centro de la esfera parte de la posición y=0.999R, desplazado de la posición de equilibrio inestable.
y es la posición del centro de la esfera, y , es la posición de cada bloque
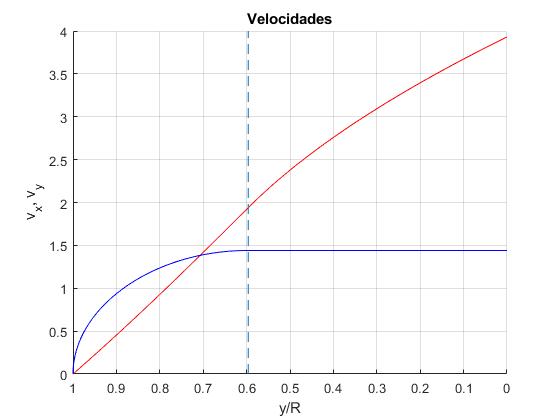
En y0, la velocidad de la esfera es v0y y la del bloque v0x
sus valores son, v0x=1.4407 m/s y v0y=1.9406 m/s, para R=1 m
Las ecuaciones del movimiento del centro de la esfera y de los bloques son
t0 es el instante en el que el centro de la esfera alcanza la posición y0 y
La velocidad de la esfera cuando impacta en el plano horizontal es
Su valor es vy=3.9305 m/s
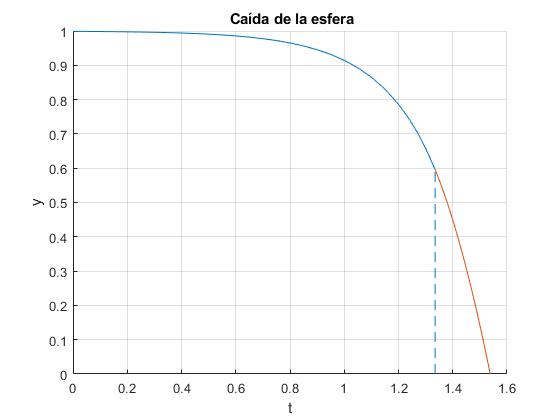
Representamos la posición y del centro de la esfera en función del tiempo t
function esfera_1
R=1;
y0=((1+sqrt(2))^(1/3)-1/(1+sqrt(2))^(1/3))*R;
f=@(t,y) -(R-y)*sqrt(2*9.8*(R+y)/(R^2+y^2));
opts=odeset('events',@stop_esfera);
[t,y]=ode45(f,[0,2],0.999*R, opts);
hold on
plot(t,y)
v0y=sqrt(2*9.8*(R^2-y0^2)*(R-y0)/(R^2+y0^2));
t0=t(end); %tiempo final
yy=@(t) y0-v0y*(t-t0)-4.9*(t-t0).^2;
tFin=(-v0y+sqrt(v0y^2+2*9.8*y0))/9.8;
fplot(yy, [t0, t0+tFin])
line([t0,t0],[0,y0], 'lineStyle','--')
hold off
xlabel('t')
ylabel('y')
grid on
title(' Caída de la esfera')
function [value,isterminal,direction]=stop_esfera(~,x)
value=x-y0;
isterminal=1;
direction=-1;
end
end
Representamos las velocidades vx (color azul) del bloque y vy (color rojo) del centro de la esfera en función de y
hold on
y0=((1+sqrt(2))^(1/3)-1/(1+sqrt(2))^(1/3))*R;
vy=@(y) sqrt(2*9.8*R*(1-y.^2).*(1-y)./(1+y.^2));
fplot(vy,[y0,1], 'color','r');
vyy=@(y) sqrt(vy(y0)^2+2*9.8*(y0-y));
fplot(vyy, [0,y0],'color','r')
vx=@(y) (y/sqrt(R)).*sqrt(2*9.8*(1-y)./(1+y.^2));
fplot(vx,[y0,1], 'color','b');
line([0,y0],[vx(y0),vx(y0)],'color','b')
line([y0,y0],[0,4], 'lineStyle','--')
hold off
set(gca, 'XDir','reverse')
xlabel('y')
ylabel('v_x, v_y')
grid on
title('Velocidades')
Actividades
Mostramos el movimiento de la esfera y de los dos bloques
Se pulsa el botón titulado Nuevo
Una cúpula semiesférica móvil
Una partícula de masa m desliza sin rozamiento sobre una cúpula semiesférica de masa M y radio R. La cúpula puede deslizar sin rozamiento sobre el plano horizontal. Vamos a calcular el ángulo θc para el cual la partícula deja de estar en contacto con la cúpula.
El problema para una cúpula semiesférica fija ha sido estudiado en la página titulada Movimiento sobre una cúpula semiesférica (sin rozamiento)
Las fuerzas externas e internas que actúan en el sistema formado por la partícula y la cúpula semiesférica son:
- El peso de la partícula, mg y de la cúpula, Mg
- La reacción del plano horizontal sobre la cúpula. Todas ellas verticales
- Una fuerza interna, la reacción N, que es la fuerza que ejerce la cúpula sobre la partícula, igual y de sentido contrario a la que ejerce la partícula sobre la cúpula
Conservación del momento lineal
No hay fuerzas externas en la dirección horizontal, se conserva el momento lineal.
Supondremos que la partícula parte del vértice de la cúpula en reposo y la cúpula está inicialmente en reposo. vx es la componente horizontal de la velocidad de la partícula y vy es la componente vertical. Vx es la velocidad de la cúpula cuando la posición de la partícula es θ
Conservación de la energía
Aplicamos el principio de conservación de la energía. La energía potencial de la partícula correspondiente a la altura h se transforma en energía cinética de la partícula y de la cúpula
Dinámica del movimiento circular
En el Sistema de Referencia ligado a la cúpula la componente horizontal ux de la velocidad de la partícula es
La velocidad relativa , es tangente a la trayectoria circular, su módulo es
La partícula deja de estar en contacto con la cúpula en la posición θc cuando la reacción N=0, las velocidades Vx y vx son constantes y la única fuerza que actúa sobre la partícula es el peso mg. De la dinámica del movimiento circular
Angulo crítico
Sustituimos en la ecuación de la conservación de la energía vx y vy y llamamos r=m/M
El coseno del ángulo crítico θc es la raíz positiva menor o igual que la unidad de la ecuación de tercer grado
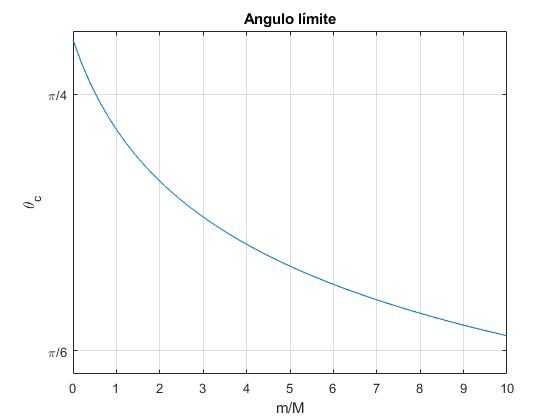
Casos particulares:
Cuando r=0, (una cúpula de masa infinita), cosθc=2/3. Resultado ya obtenido
Para r=1
Cuando r→∞
Representamos el ángulo θc en función de r=m/M. Para obtener las raíces de la ecuación cúbica, utilizamos la función
function cupula
rr=linspace(0,10,50);
th=zeros(1,length(rr));
th(1)=acos(2/3);
i=2;
for r=rr(2:end)
raiz=raices_3([1,0,-3*(1/r+1),2*(1/r+1)]);
for k=1:3
if abs(raiz(k))<=1
th(i)=acos(raiz(k));
i=i+1;
break;
end
end
end
plot(rr,th)
set(gca,'YTick',0:pi/12:pi/3)
set(gca,'YTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3'})
xlabel('m/M')
ylabel('\theta_c')
grid on
title('Angulo límite')
function x = raices_3(p)
Q=(p(2)*p(2)-3*p(3))/9;
R=(2*p(2)^3-9*p(2)*p(3)+27*p(4))/54;
x=zeros(3,1); %reserva memoria para un vector de tres elementos
if (R*R)<(Q^3)
tetha=acos(R/sqrt(Q^3));
x(1)=-2*sqrt(Q)*cos(tetha/3)-p(2)/3;
x(2)=-2*sqrt(Q)*cos((tetha+2*pi)/3)-p(2)/3;
x(3)=-2*sqrt(Q)*cos((tetha-2*pi)/3)-p(2)/3;
else
A=-sign(R)*nthroot(abs(R)+sqrt(R*R-Q^3),3);
if A==0
B=0;
else
B=Q/A;
end
x(1)=(A+B)-p(2)/3;
x(2)=-(A+B)/2-p(2)/3+(sqrt(3)*(A-B)/2)*sqrt(-1); %mejor que i
x(3)=-(A+B)/2-p(2)/3-(sqrt(3)*(A-B)/2)*sqrt(-1);
end
end
end
Referencias
En la página siguiente