

Una partícula desliza a lo largo de la generatriz de un cono que gira
Movimiento en el cono
Sea un cono de altura h y radio de la base R. Supongamos que se ha hecho una ranura a lo largo del cono, desde el vértice a la base, señalada por la línea de color rojo en la figura.
El cono gira alrededor del eje Z con velocidad angular ω0. Una partícula de masa m se suelta en el vértice deslizando por la ranura sin rozamiento alguno, tal como se indica en la figura. Vamos a estudiar el movimiento de la partícula y del cono y calcularemos la velocidad angular del cono cuando la partícula llege a su base
El momento de inercia del cono macizo alrededor del eje Z es I0=3MR2/10. Siendo M la masa del cono
En el instante t=0, la partícula de masa m se encuentra en el vértice del cono que gira con velocidad angular ω0. El momento angular es I0ω0 y la energía inicial del sistema es
En el instante t, la velocidad angular de rotación alrededor del eje Z del cono es ω. La partícula se ha desplazado x a lo largo de la ranura, su distancia al eje de rotación es xsinθ. Su velocidad tiene dos componentes: una v paralela a la ranura, y otra ωxsinθ correspondiente a la rotación alrededor del eje Z con velocidad angular ω.
Se conserva el momento angular del sistema formado por el cono y la partícula
Se conserva la energía (suma de la energía cinética de la partícula, de rotación del cono y la energía potencial correspondiente a una altura xcosθ)
Cuando la partícula llega a la base del cono, xsinθ=R, xcosθ=h, la velocidad angular ω del cono es
La velocidad final v de la partícula a lo largo de la ranura es
Ecuación del movimiento
En el sistema de referencia no inercial en rotación del cono. Las fuerzas que actúan sobre la partícula son:
- El peso, mg
- La reacción de la ranura, N
- La fuerza centrífuga, , cuyo módulo es mω2xsinθ.
- La fuerza de Coriolis, , es perpendicular al plano del dibujo y dirigida hacia el lector. No contribuye al movimiento de la partícula. Se anula con la fuerza de reacción de sentido contrario, proporcionada por la ranura
La ecuación del movimiento a lo largo de la ranura es
El ángulo girado por el cono φ en función del tiempo es
Tenemos que resolver un sistema de dos ecuaciones diferenciales, con las siguientes condiciones iniciales: en el instante t=0, x=0 y dx/dt=0, la partícula parte del vértice del cono en reposo. El ángulo inicial girado por el cono, φ=0
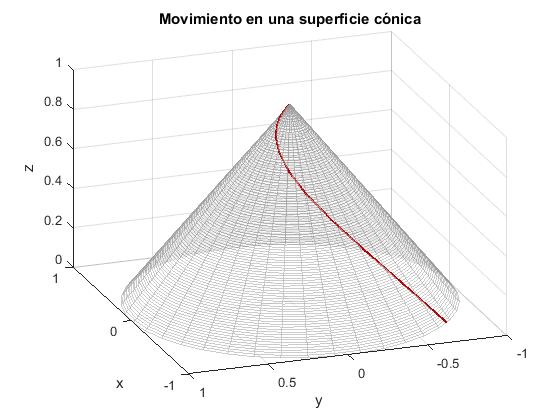
Considermos un cono de masa M=1, altura h=1 y ángulo θ=45°. El cono gira inicialmente con velocidad angular ω0=10 rad/s, cuando la partícula de masa m=0.5 kg se encuentra en el vértice del cono. La partícula empieza a deslizar sin rozamiento por la ranura. Representamos el cono y la trayectoria de la partícula sobre su suerficie, resolviendo el sistema de dos ecuaciones diferenciales mediante la función ode45 de MATLAB
theta=pi/4; %ángulo del cono
h=1; %altura del cono
I0=3*h^2*tan(theta)^2/10; %momento de inercia del cono, M=1
m=0.5; %masa partícula
w0=10; %velocidad angular inicial de rotación
opts=odeset('events',@(t,x) cono_gira_ode45(t,x,h,theta));
fg=@(t,x)[x(2); 9.8*cos(theta)+x(1)*sin(theta)^2*
(I0*w0/(I0+m*x(1)^2*sin(theta)^2))^2; I0*w0/(I0+m*x(1)^2*sin(theta)^2)];
[t,x]=ode45(fg,[0,10],[0,0,0], opts);
xp=x(:,1).*cos(x(:,3))*sin(theta);
yp=x(:,1).*sin(x(:,3))*sin(theta);
zp=h-x(:,1)*cos(theta);
fprintf('tiempo: %1.2f, velocidad angular: %1.2f, velocidad partícula:
%1.2f\n',t(end),I0*w0/(I0+m*x(end,1)^2*sin(theta)^2),x(end,2))
hold on
view(250,30)
%superficie cónica
phi=linspace(0,2*pi,40);
r=linspace(0,h/cos(theta));
[phi,r]=meshgrid(phi,r);
x=r.*cos(phi)*sin(theta);
y=r.*sin(phi)*sin(theta);
z=h-r*cos(theta);
h1=mesh(x,y,z);
set(h1,'EdgeColor',[0.6,0.6,0.6], 'FaceAlpha',0.5,'EdgeAlpha',0.5)
%trayectoria
h1=line(xp,yp,zp);
set(h1,'Color',[.7,0,0],'LineWidth',1.5)
hold off
grid on
xlabel('x')
ylabel('y')
zlabel('z')
title('Movimiento en una superficie cónica')
Cuando la partícula llega a la base del cono
tiempo: 0.47, velocidad angular: 3.75, velocidad partícula: 7.56
Definimos una función para que interrumpa el proceso de integración cuando la partícula llegue a la base del cono x=h/cosθ
function [detect,stopin,direction]=cono_gira_ode45(~,x, h, theta)
detect=x(1)-h/cos(theta);
stopin=1;
direction=1;
end
Actividades
Se introduce
- El ángulo θ del cono, en el control titulado Angulo
- La masa m de la partícula, en el control titulado Masa
- La masa del cono se ha fijado en M=1 kg
- la altura del cono se ha fijado en h=1 m
- La velocidad angular inicial de rotación se ha fijado en ω0=10 rad/s
Observamos el movimiento de la partícula sobre la superficie del cono
En la parte izquierda se proporcionan los datos de
- El tiempo t
- El desplazamiento x de la partícula a lo largo de la ranura en la superficie del cono
- La velocidad v de la partícula en su movimiento a lo largo de la ranura
- La velocidad angular ω de rotación del cono
- La energía del sistema que deberá permanecer constante e igual a la energía inicial
Movimiento en la esfera
Una esfera de masa M y radio R gira alrededor de un eje fijo Z con velocidad angular ω0. Una partícula de masa m se desplaza con velocidad v constante a lo largo de un meridiano.
En el instante inicial t=0, la partícula se encuentra en el polo norte θ=0, cuando la velocidad angular de rotación de la esfera es ω0.
Vamos a calcular el ángulo de girado por la esfera φ, cuando la partícula llega al polo Sur, θ=π
Aplicamos el principio de conservación del momento angular
La distancia de la partícula al eje de rotación es d=Rsinθ. La velocidad angular de rotación ω=dφ/dt. En el instante t la partícula se encuentra sobre el meridiano en la posición Rθ=v·t.
Representamos la velocidad angular de rotación ω para m/M=1/2 y ω0=1
w0=1; %velocidad angular inicial de rotación
m_M=1/2; %relación entre masas
w=@(x) 2*w0./(2+5*m_M*sin(x).^2);
fplot(w,[0,pi])
grid on
set(gca,'XTick',0:pi/6:pi)
set(gca,'XTickLabel',{'0','\pi/6','\pi/3','\pi/2','2\pi/3','5\pi/6','\pi'})
xlabel('\theta')
ylabel('\omega')
title('Velocidad angular de rotación')
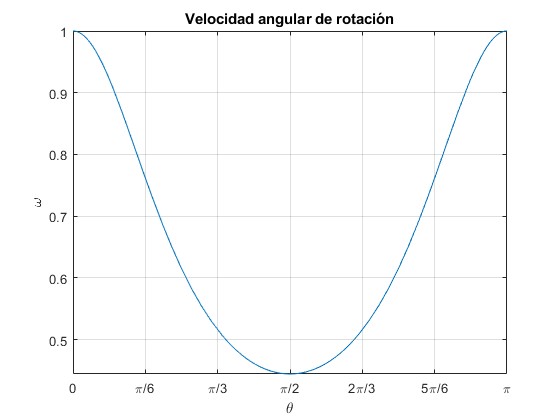
El momento de inercia es máximo en el ecuador θ=π/2 y mínimo en los polos, θ=0, π. La velocidad angular de rotación ω le ocurre la inversa, es máxima en los polos y mínima en el ecuador
La conservación del momento angular se escribe
La partícula llega al polo sur θ=π en el instante T=πR/v. El ángulo girado φ por la esfera es
Hacemos el cambio de variable
Empleamos la relación trigonométrica
Efectuamos un nuevo cambio de variable para calcular la integral
La integral definida es
No parece muy claro que el resultado entre las llaves sea π, por lo que representamos el integrando para m/M=1/2, es decir, para a=13/4 y b=5/4. Comparamos el resultado obtenido con la integración por el procedimiento numérico
%m/M=1/2; %relación entre masas
a=13/4;
b=5/4;
f=@(x) 1./(a-b*cos(x));
fplot(f,[0,2*pi])
grid on
set(gca,'XTick',0:pi/4:2*pi)
set(gca,'XTickLabel',{'0','\pi/4','\pi/2','3\pi/4','\pi',
'5\pi/4','3\pi/2','7\pi/4','2\pi'})
xlabel('\theta')
ylabel('f(\theta)')
title('Integral')
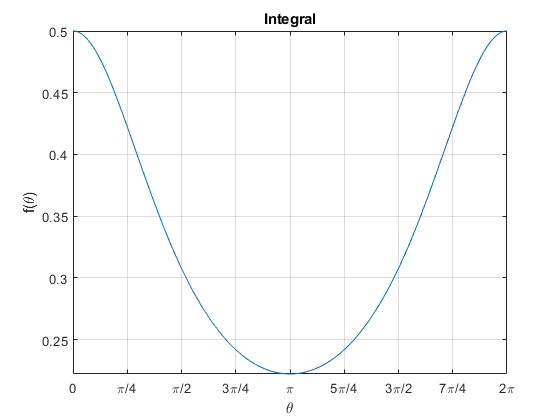
>> integral(f,0,2*pi) ans = 2.0944 >> 2*pi/sqrt(a^2-b^2) ans = 2.0944
Los resultados coinciden
Finalmente, el ángulo girado φ por la esfera alrededor del eje Z, cuando la partícula se mueve a lo largo de un meridiano partiendo del polo norte y llegando al sur
Trayectoria de a partícula en el Sistema Inercial
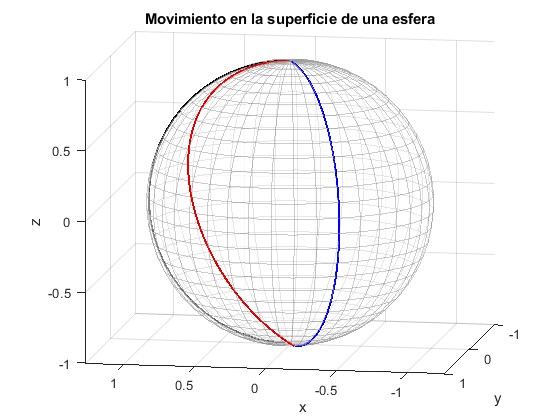
La trayectoria de la partícula en el Sistema de Referencia en rotación es media circunferencia (un meridiano)
Vamos a representar la trayectoria vista por un observador inercial, fuera de la esfera. Partimos del resultado
El ángulo girado φ en el instante t es
Representamos la trayectoria para
- radio de la esfera, R=1
- velocidad angular inicial de rotación, ω0=1
- velocidad cosntante partícula, v=1
- cociente entre de la masa de la partícula y de la de la esfera, m/M=1/2
En color negro, la posición inicial del meridiano y en azul la final, el ángulo girado por la esfera es φ=2.0944·180/π=120°
%m/M=1/2; %relación entre masas
a=13/4;
b=5/4;
R=1; %radio esfera
w0=1; %velocidad angular inicial de rotación
v=1; %velocidad partícula
T=pi*R/v; %tiempo de viaje
tt=linspace(0,T,100);
phi=zeros(1,length(tt));
k=1;
f=@(x) 1./(a-b*cos(x));
for t=tt
temp=atan(sqrt((a+b)/(a-b))*tan(v*t/R));
if temp<0
temp=pi+temp;
end
phi(k)=R*w0*2*temp/(v*sqrt(a^2-b^2));
temp1=(R*w0/v)*integral(f,0,2*v*t/R);
disp([phi(k), temp1])
k=k+1;
end
th=v*tt/R;
xp=R*sin(th).*cos(phi);
yp=R*sin(th).*sin(phi);
zp=R*cos(th);
desplaza=phi(end);
%esfera
theta=linspace(0,pi,30);
phi=linspace(0,2*pi,40);
[theta, phi]=meshgrid(theta,phi);
x=R*sin(theta).*cos(phi);
y=R*sin(theta).*sin(phi);
z=R*cos(theta);
hold on
h1=mesh(x,y,z);
set(h1,'EdgeColor',[0.6,0.6,0.6],'EdgeAlpha',0.5,'FaceAlpha',0.5)
%meridianos inicial y final
theta=linspace(0,pi,30);
x=R*sin(theta);
y=zeros(1, length(x));
z=R*cos(theta);
h1=line(x,y,z);
set(h1,'Color','k','LineWidth',1.5)
x=R*sin(theta).*cos(desplaza);
y=R*sin(theta).*sin(desplaza);
z=R*cos(theta);
h1=line(x,y,z);
set(h1,'Color','b','LineWidth',1.5)
%trayectoria
h1=line(xp,yp,zp);
set(h1,'Color',[.9,0,0],'LineWidth',1.5)
axis equal
hold off
axis equal
grid on
xlabel('x')
ylabel('y')
zlabel('z')
title('Movimiento en la superficie de una esfera')
view (-170,10)
Referencias
Lim Yung-kuo. Problems and Solutions on Mechanics. World Scientific (1994). Problem 1174, pp. 283-284
Sidney B. Cahn, Boris E. Nadgorny. A guide to physics problems, part 1. Mechanics, Relativity, and Electrodynamics.. Kluwer Academic Publishers, 2004. Problem 1.40