

Osciladores acoplados en una circunferencia
Consideremos el sistema de la figura: n partículas de masa m, unidas por muelles de la misma constante k situados en una pista circular de radio R en la situación de equlibrio.
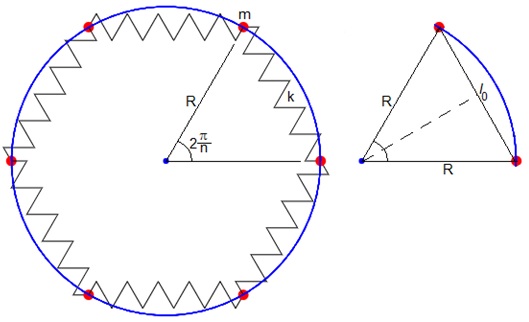
La distancia l0 entre dos partículas consecutivas
En el instante t la primera partícula se desplaza un ángulo θ1, la segunda un ángulo θ2 y así, sucesivamente. La distancia l entre dos partículas consecutivas (color azul) es
La energía cinética y potencial del sistema de partículas es
Expresamos la energía potencial en términos de los desplazamientos angulares θi
La expresión aproximada de la energía potencial (amplitudes pequeñas) es
Ahora bien, θn+1=θn por estar las partículas confinadas a moverse en una circunferencia. ke=kcos2(π/n) es la constante efectiva de los muelles elásticos
La Lagrangiana de este sistema es
Las ecuaciones del movimiento de cada partícula
Sistema de n=4 partículas
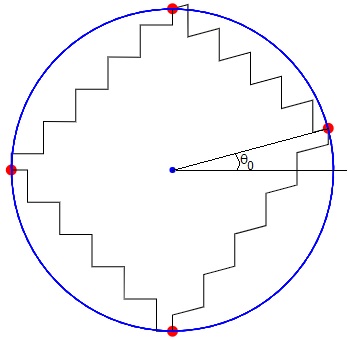
Consideremos un sistema de n=4 partículas de la misma masa m, conectadas por muelles elásticos de la misma constante k y obligadas a moverse por una pista circular de radio R
La lagrangiana es
Las ecuaciones del movimiento
En forma matricial
K es la matriz de las constantes de los muelles.
Valores propios
Buscamos una solución de la forma
θ1=X1sin(ωt+φ1), θ2=X2sin(ωt+φ2), θ3=X3sin(ωt+φ3) y θ4=X4sin(ωt+φ4)
que representan MAS de amplitud X1, X2, X3 y X4, frecuencia angular ω.
Tenemos un sistema homogéneo, los cuadrados de las frecuencias ω2 de los modos normales de vibración se calculan haciendo que el determinante de los coeficientes sea igual a cero
La diagonal de la matriz D contiene los valores propios λ.
>> K=sym([2,-1,0,-1;-1,2,-1,0;0,-1,2,-1;-1,0,-1,2]); >> [V,D]=eig(K) V = [1, -1, -1, 0] [1, 1, 0, -1] [1, -1, 1, 0] [1, 1, 0, 1] D = [0, 0, 0, 0] [0, 4, 0, 0] [0, 0, 2, 0] [0, 0, 0, 2]
Vectores propios
Los vectores propios correspondientes a cada valor propio son las columnas de la matriz V
Vamos a dividir los vectores X(1), X(2), X(3) y X(4) por un factor de escala de modo que
>> M=diag([1,1,1,1]); >> X1=V(:,1); >> r=X1'*M*X1 r =4 >> X2=V(:,2); >> r=X2'*M*X2 r =4 >> X3=V(:,3); >> r=X3'*M*X3 r =2 >> X4=V(:,4); >> r=X4'*M*X4 r =2 >> X1=X1/2; >> X2=X2/2; >> X3=X3/sym(sqrt(2)); >> X4=X4/sym(sqrt(2));
El vector X(1), se divide entre dos, el vector X(2), se divide entre dos, X(3) entre y X(4) entre
La nueva matriz V, formada por los vectores columna es
>> V=[X1,X2,X3,X4] V = [1/2, -1/2, -2^(1/2)/2, 0] [1/2, 1/2, 0, -2^(1/2)/2] [1/2, -1/2, 2^(1/2)/2, 0] [1/2, 1/2, 0, 2^(1/2)/2]
Superposición
Ecuaciones del movimiento desacopladas
Las nuevas ecuaciones del movimiento expresadas en términos de las coordenadas u(t) están desacopladas y sus soluciones son conocidas: movimiento rectilíneo uniforme para ω1=0, y Movimiento Armónico Simple para ω2 y ω3. Las soluciones de estas ecuaciones diferenciales son:
donde las constantes Ai y Bi se determinan a partir de las condiciones iniciales
Condiciones iniciales
Las condiciones inicales vienen determinadas por el desplazamiento y velocidad de cada una de las partículas en el instante t=0. Todas las partículas parten de su posición inicial en equilibrio en reposo, salvo la primera partícula a la que se le proporciona un desplazamiento θ0.
Las condiciones iniciales en el espacio u se escriben en forma matricial
Las partículas parten del reposo, entonces A1=0, B2=0, B3=0 y B4=0
Se desplaza la primera partícula de la posición de equlibrio
>> x0=[1;0;0;0];
>> u0=V^-1*x0
u0 =
1/2
-1/2
-2^(1/2)/2
0
Las ecuaciones del movimiento en el espacio u(t) son
Finalmente, el desplazamiento de cada una de las partículas respecto del tiempo, el vector x se obtiene, multiplicando la matriz V por el vector u
El resultado final es
Coinciden θ2(t) y θ4(t)
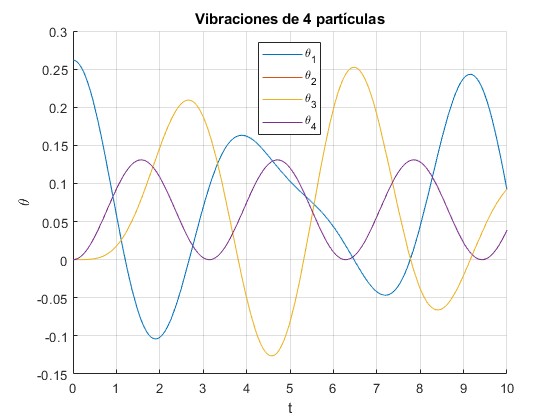
Representamos el desplazamiento de cada una de las tres partículas θ1(t), θ2(t), θ3(t) y θ3(t) para el siguiente sistema:
- Constante efectiva muelles, ke=1. Masa de las partículas m=1
- Desplazamiento de la primera partícula, θ0=π/12 (15°)
w2=2; %frecuencias de los modos normales de vibración
w3=sqrt(2);
th_0=pi/12; % 15º desplazamiento
x1=@(t) th_0*(1/2+cos(w2*t)/2+cos(w3*t))/2;
x2=@(t) th_0*(1/2-cos(w2*t)/2)/2;
x3=@(t) th_0*(1/2+cos(w2*t)/2-cos(w3*t))/2;
x4=@(t) th_0*(1/2-cos(w2*t)/2)/2;
hold on
fplot(x1,[0,10])
fplot(x2,[0,10])
fplot(x3,[0,10])
fplot(x4,[0,10])
hold off
xlabel('t')
legend('\theta_1', '\theta_2', '\theta_3', '\theta_4', 'location', 'best')
ylabel('\theta')
grid on
title('Vibraciones de 4 partículas')
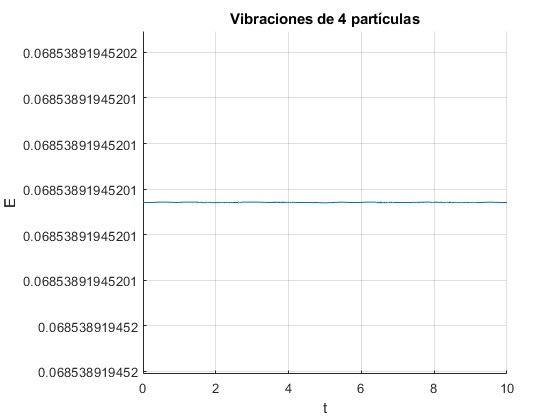
Comprobamos que la energía E se mantiene constante
w2=2; %frecuencias de los modos normales de vibración
w3=sqrt(2);
th_0=pi/12; % 15º desplazamiento
x1=@(t) th_0*(1/2+cos(w2*t)/2+cos(w3*t))/2;
x2=@(t) th_0*(1/2-cos(w2*t)/2)/2;
x3=@(t) th_0*(1/2+cos(w2*t)/2-cos(w3*t))/2;
x4=@(t) th_0*(1/2-cos(w2*t)/2)/2;
v1=@(t) th_0*(-w2*sin(w2*t)/2-w3*sin(w3*t))/2;
v2=@(t) th_0*(w2*sin(w2*t)/2)/2;
v3=@(t) th_0*(-w2*sin(w2*t)/2+w3*sin(w3*t))/2;
v4=@(t) th_0*(w2*sin(w2*t)/2)/2;
E=@(t) (v1(t).^2+v2(t).^2+v3(t).^2+v4(t).^2)/2+((x2(t)-x1(t)).^2+
(x3(t)-x2(t)).^2+(x4(t)-x3(t)).^2+(x1(t)-x4(t)).^2)/2;
hold on
fplot(E,[0,10])
hold off
xlabel('t')
ylabel('E')
grid on
title('Vibraciones de 4 partículas')
Actividades
Desplazamos la primera partícula un ángulo θ0 y la soltamos. Observamos las vibraciones del sistema de cuatro partículas
Sistema de n=6 partículas
Consideremos un sistema de n=6 partículas de la misma masa m, conectadas por muelles elásticos de la misma constante k y obligadas a moverse por una pista circular de radio R
La deducción es similar al caso n=4, por lo que solamente daremos los resultados
La matriz K es
Calculamos los valores propios, proporcinales a los cuadrados de las frecuencias ω2 de vibración
K=sym(diag(2*ones(1,6))+diag(-ones(1,5),1)+diag(-ones(1,5),-1)); K(1,6)=sym(-1); K(6,1)=sym(-1);
D = [0, 0, 0, 0, 0, 0] [0, 4, 0, 0, 0, 0] [0, 0, 1, 0, 0, 0] [0, 0, 0, 1, 0, 0] [0, 0, 0, 0, 3, 0] [0, 0, 0, 0, 0, 3]
Vectores propios
Los vectores propios correspondientes a cada valor propio son las columnas de la matriz V
V = [1, -1, -1, 1, -1, -1] [1, 1, -1, 0, 1, 0] [1, -1, 0, -1, 0, 1] [1, 1, 1, -1, -1, -1] [1, -1, 1, 0, 1, 0] [1, 1, 0, 1, 0, 1]
Vamos a dividir los vectores X(1), X(2), X(3), X(4), X(5) y X(6) por un factor de escala de modo que
K=sym(diag(2*ones(1,6))+diag(-ones(1,5),1)+diag(-ones(1,5),-1)); K(1,6)=sym(-1); K(6,1)=sym(-1); V,D]=eig(K); M=diag(ones(1,6)); X1=V(:,1); X2=V(:,2); X3=V(:,3); X4=V(:,4); X5=V(:,5); X6=V(:,6); r=X1'*M*X1; X1=X1/sym(sqrt(r)); r=X2'*M*X2; X2=X2/sym(sqrt(r)); r=X3'*M*X3; X3=X3/sym(sqrt(r)); r=X4'*M*X4; X4=X4/sym(sqrt(r)); r=X5'*M*X5; X5=X5/sym(sqrt(r)); r=X6'*M*X6; X6=X6/sym(sqrt(r)); V=[X1,X2,X3,X4,X5,X6];
La nueva matriz V, formada por los vectores columna es
V = [6^(1/2)/6, -6^(1/2)/6, -1/2, 1/2, -1/2, -1/2] [6^(1/2)/6, 6^(1/2)/6, -1/2, 0, 1/2, 0] [6^(1/2)/6, -6^(1/2)/6, 0, -1/2, 0, 1/2] [6^(1/2)/6, 6^(1/2)/6, 1/2, -1/2, -1/2, -1/2] [6^(1/2)/6, -6^(1/2)/6, 1/2, 0, 1/2, 0] [6^(1/2)/6, 6^(1/2)/6, 0, 1/2, 0, 1/2]
Condiciones iniciales
Las condiciones inicales vienen determinadas por el desplazamiento y velocidad de cada una de las partículas en el instante t=0. Todas las partículas parten de su posición inicial en equilibrio en reposo, salvo la primera partícula a la que se le proporciona un desplazamiento θ0.
Las condiciones iniciales en el espacio u se escriben en forma matricial
Las partículas parten del reposo, entonces B1=0, B2=0, B3=0, B4=0, B5=0 y B6=0
Se desplaza la primera partícula de la posición de equlibrio
>> x0=[1;0;0;0;0;0];
>> u0=V^-1*x0 % V^-1 matriz inversa de V
u0 =
6^(1/2)/6
-6^(1/2)/6
-1/3
1/3
-1/3
-1/3
Los desplazamientos de las partículas θi(t), i=1,2,...6 son
w2=2; %frecuencias de los modos normales de vibración
w3=1;
w4=1;
w5=sqrt(3);
w6=sqrt(3);
th_0=pi/12; % 15º desplazamiento
x1=@(t) th_0*(1+cos(w2*t)+cos(w3*t)+cos(w4*t)+cos(w5*t)+cos(w6*t))/6;
x2=@(t) th_0*(1-cos(w2*t)+cos(w3*t)-cos(w5*t))/6;
x3=@(t) th_0*(1+cos(w2*t)-cos(w4*t)-cos(w6*t))/6;
x4=@(t) th_0*(1-cos(w2*t)-cos(w3*t)-cos(w4*t)+cos(w5*t)+cos(w6*t))/6;
x5=@(t) th_0*(1+cos(w2*t)-cos(w3*t)-cos(w5*t))/6;
x6=@(t) th_0*(1-cos(w2*t)+cos(w4*t)-cos(w6*t))/6;
hold on
fplot(x1,[0,10])
fplot(x2,[0,10])
fplot(x3,[0,10])
fplot(x4,[0,10])
fplot(x5,[0,10])
fplot(x6,[0,10])
hold off
xlabel('t')
legend('\theta_1', '\theta_2', '\theta_3', '\theta_4', '\theta_5', '\theta_6',
'location', 'best')
ylabel('\theta')
grid on
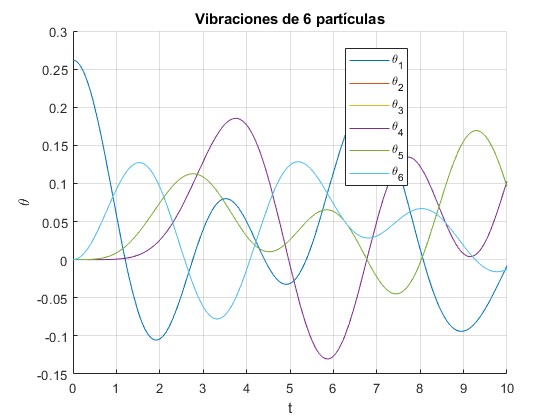
title('Vibraciones de 6 partículas')
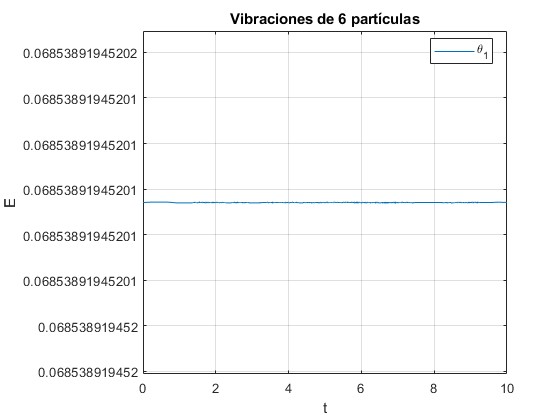
Comprobamos que la energía E se mantiene constante
w2=2; %frecuencias de los modos normales de vibración
w3=1;
w4=1;
w5=sqrt(3);
w6=sqrt(3);
th_0=pi/12; % 15º desplazamiento
x1=@(t) th_0*(1+cos(w2*t)+cos(w3*t)+cos(w4*t)+cos(w5*t)+cos(w6*t))/6;
x2=@(t) th_0*(1-cos(w2*t)+cos(w3*t)-cos(w5*t))/6;
x3=@(t) th_0*(1+cos(w2*t)-cos(w4*t)-cos(w6*t))/6;
x4=@(t) th_0*(1-cos(w2*t)-cos(w3*t)-cos(w4*t)+cos(w5*t)+cos(w6*t))/6;
x5=@(t) th_0*(1+cos(w2*t)-cos(w3*t)-cos(w5*t))/6;
x6=@(t) th_0*(1-cos(w2*t)+cos(w4*t)-cos(w6*t))/6;
v1=@(t) th_0*(-w2*sin(w2*t)-w3*sin(w3*t)-w4*sin(w4*t)-w5*sin(w5*t)-w6*sin(w6*t))/6;
v2=@(t) th_0*(w2*sin(w2*t)-w3*sin(w3*t)+w5*sin(w5*t))/6;
v3=@(t) th_0*(-w2*sin(w2*t)+w4*sin(w4*t)+w6*sin(w6*t))/6;
v4=@(t) th_0*(w2*sin(w2*t)+w3*sin(w3*t)+w4*sin(w4*t)-w5*sin(w5*t)-w6*sin(w6*t))/6;
v5=@(t) th_0*(-w2*sin(w2*t)+w3*sin(w3*t)+w5*sin(w5*t))/6;
v6=@(t) th_0*(w2*sin(w2*t)-w4*sin(w4*t)+w6*sin(w6*t))/6;
E=@(t) (v1(t).^2+v2(t).^2+v3(t).^2+v4(t).^2+v5(t).^2+v6(t).^2)/2+
((x2(t)-x1(t)).^2+(x3(t)-x2(t)).^2+(x4(t)-x3(t)).^2+(x5(t)-x4(t)).^2+
(x6(t)-x5(t)).^2+(x1(t)-x6(t)).^2)/2;
fplot(E,[0,10])
xlabel('t')
ylabel('E')
grid on
title('Vibraciones de 6 partículas')
Actividades
Desplazamos la primera partícula partícula un ángulo θ0 y la soltamos. Observamos las vibraciones del sistema de seis partículas
Referencias
Lim Yung-kuo. Problems and Solutions on Mechanics. World Scientific (1994). Problem 1125, pp. 211-213