

El péndulo de Wilberforce
Ecuaciones del movimiento
Sea kx la constante elástica del muelle en las oscilaciones longitudinales y kθ a constante en las oscilaciones torsionales. Sea x el desplazamiento vertical del muelle de la posición de equilibrio y θ el ángulo de rotación alrededor del eje vertical.
El acoplamiento entre los dos modos de oscilación está descrito por una función lineal de la forma εxθ /2, donde ε se denomina constante de acoplamiento.
La energía del sistema es la suma de la energía cinética de traslación del bloque, de rotación alrededor del eje vertical, la energía potencial del muelle cuando se deforma una longitud x, cuando gira un ángulo θ y la energía de acoplamiento
Las ecuaciones del movimiento de Lagrange nos llevan al sistema de dos ecuaciones diferenciales de segundo orden. La lagrangiana L=T-V con los símbolos se escribe
Las ecuaciones del movimiento son:
En ausencia del término de acoplamiento ε=0 las ecuaciones diferenciales describen dos Movimientos Armónicos Simples de frecuencias angulares
Eliminamos x en el sistema de dos ecuaciones diferenciales
Suponiendo una solución de la forma
θ=A·sin(ωt)+ B·cos(ωt)
e insertándola en la ecuación diferencial de cuarto orden en θ, obtenemos la ecuación bicuadrada
Las dos raíces reales de esta ecuación son las frecuencias ω1 y ω2 de los modos normales de vibración
La forma general del ángulo θ de rotación en función del tiempo t es una combinación de los dos modos normales de vibración
θ(t)=Asin(ω1t)+ Bcos(ω1t)+ Csin(ω2t)+ Dcos(ω2t)
La velocidad angular de rotación es
Para calcular la posición x(t), se introduce θ(t) y su derivada segunda en la ecuación diferencial de segundo orden que describe la rotación del cilindro.
La velocidad del c.m. del cilindro es
Las condiciones iniciales determinan los valores de los coeficientes A, B, C, D.
Desplazamos el cilindro x0 y lo giramos un ángulo θ0 y a continuación lo soltamos. La velocidad inicial es dx/dt=0, dθ/dt=0 en el instante t=0.
Resolvemos el sistema de cuatro ecuaciones
Despejamos las incógnitas A, B, C, y D
A=C=0
Las expresiones de la posición x y θ y velocidad dx/dt y dθ/dt en función del tiempo son
θ(t)= Bcos(ω1t)+ Dsin(ω2t)
Modos normales de vibración
-
El modo 1 de frecuencia angular ω1, se obtiene cuando D=0,
-
El modo 2 de frecuencia angular ω2, se obtiene cuando B=0,
La relación entre la posición inicial x0 del cilindro y el ángulo inicial de giro θ0 es
La posición x del cilindro y el ángulo girado θ en función del tiempo t son
La posición x del cilindro y el ángulo girado θ en función del tiempo t son
Cuando las frecuencias son iguales
Si modificamos el momento de inercia I, cambiando la distancia d de las esferas al eje de rotación podemos conseguir que la frecuencia angular de las oscilaciones longitudinales ωx y la frecuencia angular de las oscilaciones torsionales ωθ sean iguales ω =ωx=ωθ
Las frecuencias ω1 y ω2 de los modos normales de vibración tienen una expresión mucho más simple
Es importante analizar el caso de que x0=0. Se gira el cilindro un ángulo inicial θ0 y luego, se suelta.
Los coeficientes B=D=θ0/2. Las ecuaciones del movimiento son
-
La relación entre la posición inicial x0 del cilindro y el ángulo inicial de giro θ0 es en el modo normal 1 de frecuencia angular ω1 es
-
La relación entre la posición inicial x0 del cilindro y el ángulo inicial de giro θ0 es en el modo normal 2 de frecuencia angular ω2 es
Ejemplo:
- Constante de acoplamiento, ε=0.03 kg·m/s2
- Masa del cilindro y las esferas, m=0.43 kg
- Constante elástica, kx =16.98 N/m
Frecuencia angular del movimiento de traslación es
-
Constante elástica, kθ=5.74·10-3 Nm
- Momento de inercia I es variable
El momento de inercia I respecto del eje de rotación se puede variar, moviendo dos pequeñas esferas de igual masa m situadas a la misma distancia d del eje de rotación.
El momento de inercia del sistema, será igual al momento de inercia del cuerpo cilíndrico 1.28·10-4 kg·m2 más el momento de inercia de las dos esferas consideradas como masas puntuales de 3.4·10-3 kg cada una.
I=1.28·10-4+2·3.4·10-3·d2 kg m2
La frecuencia angular ωθ de las oscilaciones torsionales se puede cambiar modificando el momento de inercia I es decir, la distancia d de las pequeñas esferas, al eje de rotación.
Para d=3.5 cm=0.035 m, el momento de inercia I=1.3633·10-4 kg m2, la frecuencia angular de las oscilaciones torsionales es ωθ=6.489 rad/s
masa=0.43; %masa del bloque
inerciaIni=1.28e-4; %inercia de la varilla soporte
cteTorsion=5.74e-3;
cteElastica=16.98;
acoplamiento=0.03;
masaEsfera=3.4e-3; %masa de las dos partículas
dist=0.035; %distancia de las esferas al eje
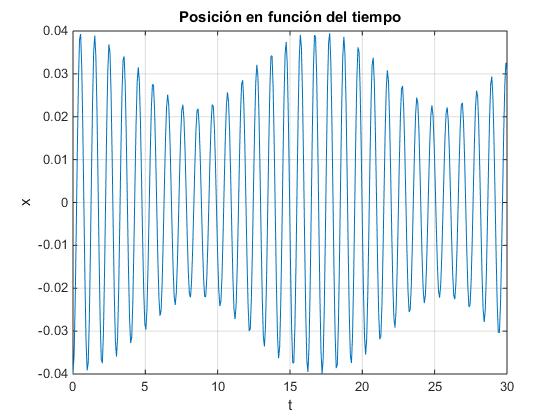
x0=-0.04; %Posición inicial del bloque
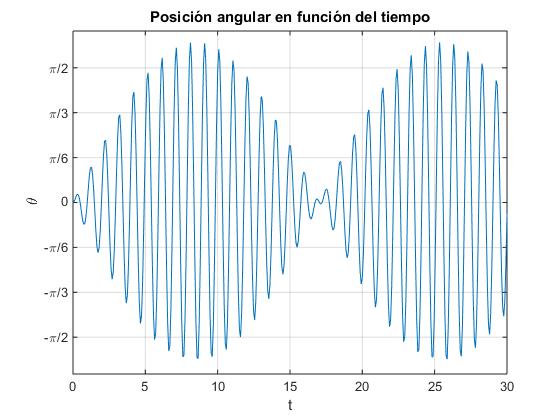
y0=0; %ángulo inicial
inercia=inerciaIni+2*masaEsfera*dist*dist;
wx2=cteElastica/masa;
wy2=cteTorsion/inercia;
w1=(wx2+wy2+sqrt((wx2-wy2)*(wx2-wy2)
+acoplamiento*acoplamiento/(masa*inercia)))/2;
w2=(wx2+wy2-sqrt((wx2-wy2)*(wx2-wy2)
+acoplamiento*acoplamiento/(masa*inercia)))/2;
B=-(acoplamiento*x0/(2*inercia)-(w2-wy2)*y0)/(w2-w1);
D=(acoplamiento*x0/(2*inercia)-(w1-wy2)*y0)/(w2-w1);
t=linspace(0,30,400);
x=(2.0/acoplamiento)*((inercia*w1-cteTorsion)*B*cos(sqrt(w1)*t)
+ (inercia*w2-cteTorsion)*D*cos(sqrt(w2)*t));
y=B*cos(sqrt(w1)*t)+D*cos(sqrt(w2)*t);
figure
plot(t,x)
grid on
xlabel('t')
ylabel('x')
title('Posición en función del tiempo')
figure
plot(t,y)
set(gca,'YTick',-pi/2:pi/6:pi/2)
set(gca,'YTickLabel',{'-\pi/2','-\pi/3','-\pi/6','0','\pi/6',
'\pi/3','\pi/2' })
grid on
xlabel('t')
ylabel('\theta')
title('Posición angular en función del tiempo')
Las frecuencias de los modos normales de oscilación 1 y 2 valen
ω1=6.569
rad/s
ω2=6.200
rad/s
Si la posición inicial del cilindro x0=-0.04, el ángulo que hemos de girar para observar el primer modo normal de oscilación es
θ0=-4.20 rad=-240.7º
para observar el segundo modo normal de oscilación es
θ0=1.20 rad=68.8º
Modificamos la distancia d o el momento de inercia I hasta lograr que ambas frecuencias sean iguales. Los valores de dichas frecuencias aparecen en la parte inferior la frecuencia ωx, y en la parte superior ωθ.
El valor de d que hace que ambas frecuencias sean iguales es
El momento de inercia vale I=1.45·10-4 kg m2
La frecuencias angulares ωx=ωθ=6.284 rad/s
Las frecuencias de los modos normales de oscilación 1 y 2 valen
ω1=6.433
rad/s
ω2=6.131 rad/s
Si la posición inicial del cilindro x0=-0.04, el ángulo que hemos de girar para observar el primer modo normal de oscilación es
θ0=-2.18 rad=-124.6º
para observar el segundo modo normal de oscilación es
θ0=2.18 rad=124.6º
Es importante examinar el caso de que x0=0 y θ0≠0, por ejemplo, θ0=0.70 rad=40º
θ(t)=20(cos(ω1t)+ cos(ω2t)) grados
x(t)=0.64(cos(ω1t)-cos(ω2t)) cm
Balance energético
Se puede observar los cambios energéticos en el diagrama en forma de tarta a la derecha. En distintos colores se representan las energías potenciales elásticas y las energías cinéticas correspondientes a ambos modos de oscilación.
Energías correspondientes a las oscilaciones longitudinales
- Energía potencial
- Energía cinética
Energías correspondientes a las oscilaciones torsionales
- Energía potencial
- Energía cinética
Energía de acoplamiento
En la parte superior derecha, se proporciona el valor numérico de la energía total que se mantiene constante durante el movimiento del péndulo.
Un diagrama de barras nos muestra como se distribuye la energía total. Se ha de tener en cuenta, que la energía de acoplamiento puede ser positiva o negativa, las restantes energías son positivas.
Actividades
Se introduce
- La posición inicial vertical x0 del cilindro en cm, en el control titulado Altura
- El ángulo de giro inicial θ0 en grados, en el control titulado Angulo
- La posición de las masas en el control Posición masas, hacia el centro para disminuir el momento de inercia, hacia fuera para aumentarlo.
Se pulsa el botón titulado Nuevo
Referencias
Berg R. H, Marshall T. Wilberforce pendulum oscillations and normal modes. Am. J. Phys. 59 (1) January 1991, pp. 32-38.