

Dos osciladores acoplados verticales
Dos partículas unidas a dos muelles en posición vertical con un extremo fijo
Consideremos dos muelles en posición vertical de constantes k1 y k2, unidos a dos partículas de masas m1 y m2 tal como se muestra en la figura. La longitud del primer muelle sin deformar es l1 y la del segundo l2. En un instante dado t, las posiciones de las partículas son y1 e y2 y sus velocidades son dy1/dt y dy2/dt
La energía cinética de las dos partículas es
La energía potencial es la suma de las energías potenciales gravitatorias y elásticas de los dos muelles deformados
La lagrangiana L=Ek-Ep es
Las ecuaciones del movimiento son
o bien
Posiciones de equilibrio
Las posiciones de equilibrio ye1, ye2, se calculan poniendo d2y1/dt2=0, d2y2/dt2=0 en las ecuaciones del movimiento
Alternativamente, calculando las fuerzas que actúan sobre cada una de las dos partículas, tal como se ve en la figura. El muelle de color rojo, ejerce fuerzas iguales y de sentido contrario sobre cada una de las dos partículas, de acuerdo a la tercera ley de Newton
Despejamos en el sistema de dos ecuaciones las incógnitas ye1, ye2
Modos normales de vibración
Llamemos y1=ye1+x1, e y2=ye2+x1. Las ecuaciones del movimiento se simplifican en términos de la variable x
Buscamos una solución de la forma
x1=X1sin(ωt+φ), x2=X2sin(ωt+φ)
que representan Movimientos Armónicos Simples de amplitudes X1, X2 y frecuencia angular ω.
En forma matricial
Tenemos un sistema homogéneo, los cuadrados de las frecuencias de los modos normales de vibración se calculan haciendo que el determinante de los coeficientes sea igual a cero
Obtenemos una ecuación de segundo grado en ω2 con dos raíces. Para cada una de las dos frecuencias angulares ω1 y ω2 el sistema homogéneo nos proporciona una relación entre X1 y X2 que denominaremos r1 y r2. Tomando la primera ecuación del sistema homogéneo
Movimiento de cada partícula
El movimiento resultante de cada una de las partículas x1 y x2 es la combinación lineal de los dos modos normales de vibración de frecuencias angulares ω1 y ω2
A partir de las condiciones iniciales
determinamos las constantes desconocidas: φ1,φ2,
El resultado es
Conocidos los desplazamientos de las partículas relativos a sus posiciones de equilibrio x1 y x2, calculamos los desplazamientos de las partículas y1=ye1+x1, e y2=ye2+x1.
Habitualmente, las partículas se desplazan x01 y x02 de sus posiciones de equilibrio con velocidad inicial cero, v01=0, v02=0
Las fases iniciales valen, φ1=π/2, φ2=π/2
Las amplitudes valen
El movimiento de las partículas para estas condiciones iniciales, se describe mediante las ecuaciones
- El primer modo de vibración con frecuencia angular ω1 se obtiene cuando r1x01=x02
- El segundo modo de vibración con frecuencia angular ω2 se obtiene cuando r2x01=x02
Ejemplo
Estudiamos el caso particular, k1=k2=k, m1=2m, m2=m.
Las frecuencias angulares de los modos de vibración son
Calculamos la relación entre amplitudes
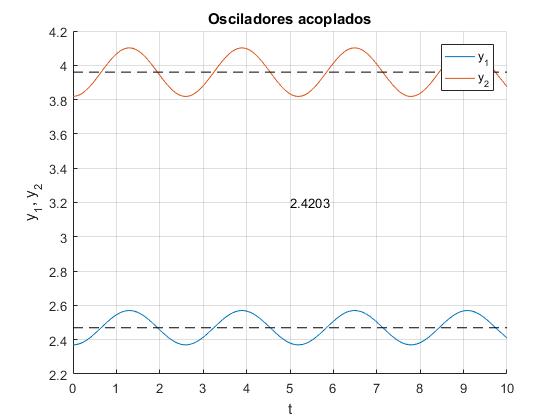
Supongamos que los dos partículas se desplazan d de sus posiciones de equilibrio y se sueltan: x01=x02=d, dx1/dt=0, dx2/dt=0. Los desplazamientos y de las partículas
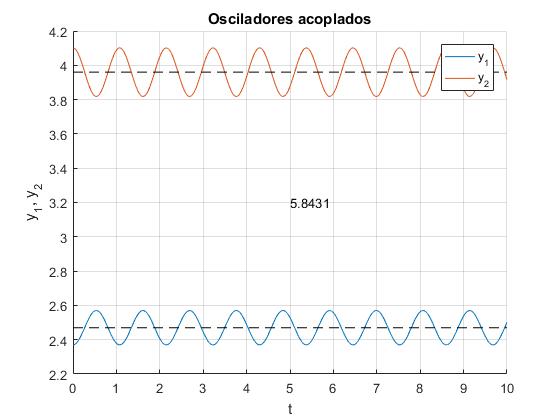
Elaboramos un script para representar el movimiento de las partículas en los dos modos de vibración de frecuencias angulares ω1 y ω2
k1=20; k2=20; %constantes de los muelles
m1=2; m2=1; %masas de las partículas
l1=1; l2=1; %longitud de los muelles sin deformar
%posiciones de equilibrio
ye1=(m1+m2)*9.8/k1+l1;
ye2=ye1+m2*9.8/k2+l2;
%frecuencias de los modos de vibración
b=k2/m2+(k1+k2)/m1;
c=k1*k2/(m1*m2);
w1=sqrt((b+sqrt(b^2-4*c))/2);
w2=sqrt((b-sqrt(b^2-4*c))/2);
%relación entre amplitudes
r1=(k1+k2-m1*w1^2)/k2;
r2=(k1+k2-m1*w2^2)/k2;
%condiciones iniciales
x01=-0.1;
x02=r1*x01; %primer modo de oscilación
A=(r2*x01-x02)/(r2-r1);
B=(r1*x01-x02)/(r2-r1);
%movimiento de las partículas
y1=@(t) A*cos(w1*t)-B*cos(w2*t)+ye1;
y2=@(t) r1*A*cos(w1*t)-r2*B*cos(w2*t)+ye2;
hold on
fplot(y1,[0,10])
fplot(y2,[0,10])
text(5,3.2, num2str(w1))
line([0,10],[ye1, ye1],'lineStyle','--', 'color','k')
line([0,10],[ye2, ye2],'lineStyle','--', 'color','k')
hold off
grid on
xlabel('t')
ylabel('y_1, y_2')
legend('y_1', 'y_2')
title('Osciladores acoplados')
figure
x02=r2*x01; %segundo modo de oscilación
A=(r2*x01-x02)/(r2-r1);
B=(r1*x01-x02)/(r2-r1);
y1=@(t) A*cos(w1*t)-B*cos(w2*t)+ye1;
y2=@(t) r1*A*cos(w1*t)-r2*B*cos(w2*t)+ye2;
hold on
fplot(y1,[0,10])
fplot(y2,[0,10])
text(5,3.2, num2str(w2))
line([0,10],[ye1,ye1],'lineStyle','--', 'color','k')
line([0,10],[ye2,ye2],'lineStyle','--', 'color','k')
hold off
grid on
xlabel('t')
ylabel('y_1, y_2')
legend('y_1', 'y_2')
title('Osciladores acoplados')
Primer modo de vibración, frecuencia angular ω2=2.4203
Segundo modo de vibración, frecuencia angular ω1=5.8431
Actividades
Se introduce
- La constante k1 del primer muelle, en el control titulado k1
- La constante k2 del segundo muelle, en el control titulado k2
- La masa m1 de la primera partícula, en el control titulado m1
- La masa m2 de la segunda partícula, en el control titulado m2
- El desplazamiento x01 de la primera partícula de su posición de equilibrio, en el control titulado x01
- El desplazamiento x02 de la segunda partícula de su posición de equilibrio, en el control titulado x02
- Las longitudes de los muelles si deformar se han fijado en l1=1, y l2=1
Se pulsa el botón titulado Nuevo
Observamos el movimiento de las dos partículas. Representamos la posición de cada una de las dos las partículas en función del tiempo. Una línea a trazos señala la posición de equilibrio de cada partícula
En la parte superior, se proporcionan los datos:
- del tiempo t
- las posiciones de las partículas y1 e y2
- las frecuencias angulares de los dos modos de vibración ω1 y ω2
- Los coeficientes r1 e r2
Estos dos datos son importantes para visualizar los modos normales de vibración:
Sea k1=2, k2=0.5, m1=4, m2=3, y x01=10
Obtenemos r1=-0.333. Para visualizar el primer modo de vibración de frecuencia angular ω1=0.816, introducimos en el control titulado x02 el valor r1x01=-3.333
Obtenemos r2=4.000. Para visualizar el segundo modo de vibración de frecuencia angular ω2=0.354, introducimos en el control titulado x02 el valor r2x01=40
La partícula de color rojo se mantiene por debajo de la partícula de color azul. Podría darse el caso, para unas condiciones iniciales determinadas, que hagan que la partícula de color rojo esté por encima de la de color azul, en ese caso, la simulación se detiene e invita al usuario a probar otros valores de los parámetros
Dos partículas unidas a tres muelles en posición vertical con los dos extremos fijos
Consideremos tres muelles en posición vertical de constantes k1, k2 y k3, unidos a dos partículas de masas m1 y m2 tal como se muestra en la figura. Los extremos del primer muelle y del tercer muelle están fijos y separados una distancia h. La longitud del primer muelle sin deformar es l1, la del segundo l2 y la del tercero l3. En un instante dado t, las posiciones de las partículas son y1 e y2 y sus velocidades son dy1/dt y dy2/dt
La energía cinética de las dos partículas es
La energía potencial es la suma de las energías potenciales gravitatorias y elásticas de los tres muelles deformados
La lagrangiana L=Ek-Ep es
Las ecuaciones del movimiento son
o bien
Posiciones de equilibrio
Las posiciones de equilibrio ye1, ye2, se calculan poniendo d2y1/dt2=0, d2y2/dt2=0 en las ecuaciones del movimiento
Alternativamente, calculando las fuerzas que actúan sobre cada una de las dos partículas, tal como se ve en la figura. El muelle de color rojo, ejerce fuerzas iguales y de sentido contrario sobre cada una de las dos partículas, de acuerdo a la tercera ley de Newton
Despejamos en el sistema de dos ecuaciones las incógnitas ye1, ye2
Modos normales de vibración
Llamemos y1=ye1+x1, e y2=ye2+x1. Las ecuaciones del movimiento se simplifican en términos de la variable x
Buscamos una solución de la forma
x1=X1sin(ωt+φ), x2=X2sin(ωt+φ)
que representan Movimientos Armónicos Simples de amplitudes X1, X2 y frecuencia angular ω.
En forma matricial
Tenemos un sistema homogéneo, los cuadrados de las frecuencias de los modos normales de vibración se calculan haciendo que el determinante de los coeficientes sea igual a cero
Obtenemos una ecuación de segundo grado en ω2 con dos raíces. Para cada una de las dos frecuencias angulares ω1 y ω2 el sistema homogéneo nos proporciona una relación entre X1 y X2 que denominaremos r1 y r2. Tomando la primera ecuación del sistema homogéneo
Movimiento de cada partícula
El movimiento resultante de cada una de las partículas x1 y x2 es la combinación lineal de los dos modos normales de vibración de frecuencias angulares ω1 y ω2
A partir de las condiciones iniciales
determinamos las constantes desconocidas: φ1,φ2,
El resultado es
Conocidos los desplazamientos de las partículas relativos a sus posiciones de equilibrio x1 y x2, calculamos los desplazamientos de las partículas y1=ye1+x1, e y2=ye2+x1.
Habitualmente, las partículas se desplazan x01 y x02 de sus posiciones de equilibrio con velocidad inicial cero, v01=0, v02=0
Las fases iniciales valen, φ1=π/2, φ2=π/2
Las amplitudes valen
El movimiento de las partículas para estas condiciones iniciales, se describe mediante las ecuaciones
- El primer modo de vibración con frecuencia angular ω1 se obtiene cuando r1x01=x02
- El segundo modo de vibración con frecuencia angular ω2 se obtiene cuando r2x01=x02
Ejemplo
Estudiamos el caso particular, k1=k2=k3=k, m1=2m, m2=m.
Las frecuencias angulares de los modos de vibración son
Calculamos la relación entre amplitudes
Supongamos que los dos partículas se desplazan d de sus posiciones de equilibrio y se sueltan: x01=x02=d, dx1/dt=0, dx2/dt=0. Los desplazamientos y de las partículas
Elaboramos un script para representar el movimiento de las partículas en los dos modos de vibración de frecuencias angulares ω1 y ω2. Se deberá tener cuidado al elegir los valores de los parámetros de modo que ye2 no sea mayor que h, distancia entre los extremos fijos del primer y íltimo muelle.
k1=20; k2=20; k3=20; %constantes de los muelles
m1=2; m2=1; %masas de las partículas
l1=1; l2=1; l3=1;%longitud de los muelles sin deformar
h=4; %distancia entre los extremos
%posiciones de equilibrio
ye1=((k2+k3)*(m1*9.8+k1*l1-k2*l2)+k2*(m2*9.8+k2*l2+k3*h-k3*l3))/(k1*k2+k1*k3+k2*k3);
ye2=(k2*ye1+m2*9.8+k2*l2+k3*h-k3*l3)/(k2+k3);
if(ye2>=h)
disp('Modifique los datos')
end
%frecuencias de los modos de vibración
b=(k2+k3)/m2+(k1+k2)/m1;
c=(k1*k2+k1*k3+k2*k3)/(m1*m2);
w1=sqrt((b+sqrt(b^2-4*c))/2);
w2=sqrt((b-sqrt(b^2-4*c))/2);
%relación entre amplitudes
r1=(k1+k2-m1*w1^2)/k2;
r2=(k1+k2-m1*w2^2)/k2;
%condiciones iniciales
x01=-0.1;
x02=r1*x01; %primer modo de oscilación
A=(r2*x01-x02)/(r2-r1);
B=(r1*x01-x02)/(r2-r1);
%movimiento de las partículas
y1=@(t) A*cos(w1*t)-B*cos(w2*t)+ye1;
y2=@(t) r1*A*cos(w1*t)-r2*B*cos(w2*t)+ye2;
hold on
fplot(y1,[0,10])
fplot(y2,[0,10])
text(5,2.5, num2str(w1))
line([0,10],[ye1, ye1],'lineStyle','--', 'color','k')
line([0,10],[ye2, ye2],'lineStyle','--', 'color','k')
hold off
grid on
xlabel('t')
ylabel('y_1, y_2')
legend('y_1', 'y_2')
title('Osciladores acoplados')
figure
x02=r2*x01; %segundo modo de oscilación
A=(r2*x01-x02)/(r2-r1);
B=(r1*x01-x02)/(r2-r1);
y1=@(t) A*cos(w1*t)-B*cos(w2*t)+ye1;
y2=@(t) r1*A*cos(w1*t)-r2*B*cos(w2*t)+ye2;
hold on
fplot(y1,[0,10])
fplot(y2,[0,10])
text(5, 2.5, num2str(w2))
line([0,10],[ye1,ye1],'lineStyle','--', 'color','k')
line([0,10],[ye2,ye2],'lineStyle','--', 'color','k')
hold off
grid on
xlabel('t')
ylabel('y_1, y_2')
legend('y_1', 'y_2')
title('Osciladores acoplados')
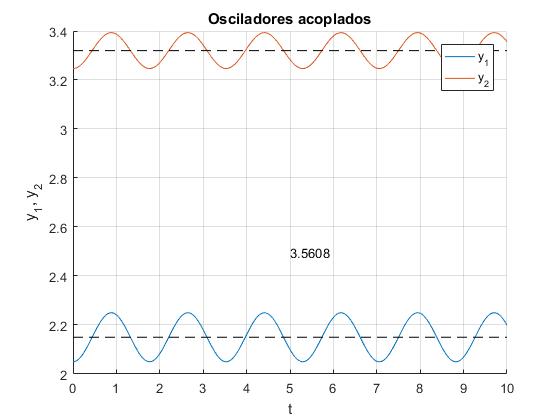
Primer modo de vibración, frecuencia angular ω1=3.5608
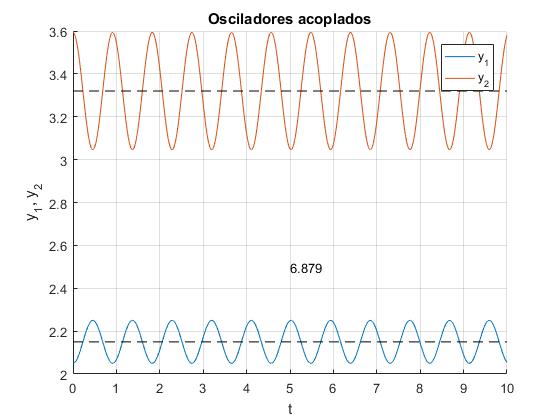
Segundo modo de vibración, frecuencia angular ω2=6.879
Referencias
Lim Yung-kuo. Problems and Solutions on Mechanics. World Scientific (1994). Problem 2052, pp. 579-581
Bernard J. Weigman, Helene F. Perry. Experimental determination of normal frequencies in coupled mechanical oscillator systems using fast Fourier transforms: An advanced undergraduate laboratory. Am. J. Phys. 61 (11) November 1993, pp. 1022-1027