

Modos de rotación del péndulo cónico simple, doble y triple
Péndulo cónico simple
Supongamos una partícula de masa m que está conectada mediante una varilla rígida de longitud l y de masa despreciable al eje vertical de un motor en O. La varilla se desvía del eje vertical un ángulo θ cuando la velocidad angular del motor ω es mayor que un cierto valor crítico ωc. La partícula describe entonces una circunferencia horizontal de radio l·sinθ.
En el Sistema de Referencia en rotación con velocidad angular ω, las fuerzas que actúan sobre la partícula son
- El peso, mg
- La fuerza centrífuga, mω2r
- La tensión de la varilla, T
Las ecuaciones del equilibrio de la partícula establecen la relación entre el ángulo θ y la velocidad angular de rotación ω
Para que cosθ≤1, ω2≥g/l. Donde g/l es el cuadrado de la velocidad angular crítica ωc
El punto de sujección O dista d del eje de rotación
Primer modo de rotación, θ>0
Las ecuaciones del equilibrio de la partícula establecen la relación entre el ángulo θ y la velocidad angular de rotación ω
Segundo modo de rotación, θ<0
La misma fórmula vale para ambos modos de rotación
Representamos la velocidad angular ω/ωc en función del ángulo de desviación θ para varios valores de la distancia d=0, 0.01, 0.05, 0.1 m. La longitud del péndulo cónico es l=0.2 m
l=0.2; %longitud del péndulo
hold on
for d=[0,0.01,0.05,0.1] %th>0
fplot(@(x) sqrt(tan(x)./(sin(x)+d/l)),[0,pi/3])
end
for d=[0.01,0.05,0.1] %th<0
f=@(x) sqrt(tan(x)./(sin(x)+d/l));
fplot(f,[-pi/3,0])
th_m=-asin((d/l)^(1/3));
plot(th_m,f(th_m), 'ko','markersize',3,'markerfacecolor','k')
end
hold off
set(gca,'XTick',-pi/3:pi/12:pi/3)
set(gca,'XTickLabel',{'-\pi/3','-\pi/4','-\pi/6', '-\pi/12', '0','\pi/12',
'\pi/6','\pi/4','\pi/3'})
grid on
ylim([0,3])
xlim([-pi/3,pi/3])
ylabel('\omega/\omega_c')
xlabel('\theta')
title('Péndulo cónico simple')
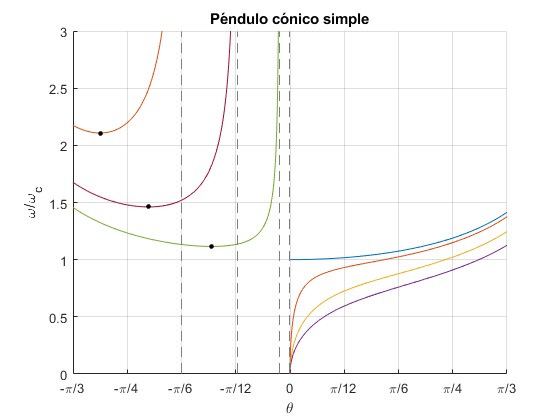
A la izquierda en la figura, θ<0, tenemos el segundo modo de rotación y a la derecha, θ>0, el primer modo de rotación, las velocidades angulares ω/ωc del primer modo son menores que las del segundo
En la parte derecha, la curva de color azul corresponde a d=0, el punto de sujección O está en el eje de giro. El péndulo se desvía θ>0, para ω>ωc, o bien, ω/ωc>1. Cuando el punto O de sujección del péndulo está a una distancia d, la desviación del péndulo θ>0 se incrementa con la velocidad angular ω
Para el segundo modo, θ<0, la función ω(θ) presenta un mínimo señalado por un punto de color negro. Calculamos el ángulo θm derivando la función ω(θ) respecto de θ e igualando a cero.
Péndulo cónico doble
Un péndulo cónico doble, consta de una varilla rígida de longitud l y de masa despreciable sujeta por uno de sus extremos al eje de rotación, se fija al otro extremo una partícula de masa m. En esta partícula se fija el extremo del segundo péndulo cónico de las mismas dimensiones
En la figura, se muestra los dos modos de rotación.
- Primer modo, θ2>0
- Segundo modo, θ2<0
Las velocidades angulares ω del primer modo son menores que las del segundo, tal como veremos al final de este apartado
En la figura, se muestran las fuerzas sobre cada una de las dos partículas, T1 y T2 son las tensiones de las varillas y F1=mω2r1 y F2=mω2r2, las fuerzas centrífugas.
-
Equilibrio de la segunda partícula
-
Equilibrio de la primera partícula
Dado θ2 calculamos θ1 resolviendo la ecuación trascendente
Dado el ángulo θ2 calculamos θ1, utilizando la función
hold on
ang_2=(0:80)*pi/180;
w=zeros(1,length(ang_2));
i=1;
for th_2=ang_2 %th_2>0
f=@(x) tan(th_2)*(2*sin(x)+sin(th_2))-2*tan(x)*(sin(x)+sin(th_2));
th_1=fzero(f,[0,pi/2]);
w(i)=sqrt(tan(th_2)/(sin(th_1)+sin(th_2)));
i=i+1;
end
plot(ang_2,w)
ang_2=-(0:80)*pi/180; %th_2<0
w=zeros(1,length(ang_2));
i=1;
for th_2=ang_2
f=@(x) tan(th_2)*(2*sin(x)+sin(th_2))-2*tan(x)*(sin(x)+sin(th_2));
th_1=fzero(f,[0, pi/2]);
w(i)=sqrt(tan(th_2)/(sin(th_1)+sin(th_2)));
i=i+1;
end
plot(ang_2,w)
hold off
set(gca,'XTick',-5*pi/12:pi/12:5*pi/12)
set(gca,'XTickLabel',{'-5\pi/12','-\pi/3','-\pi/4','-\pi/6', '-\pi/12', '0',
'\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12'})
grid on
ylim([0,4])
ylabel('\omega/\omega_c')
xlabel('\theta_2')
title('Péndulo cónico doble')
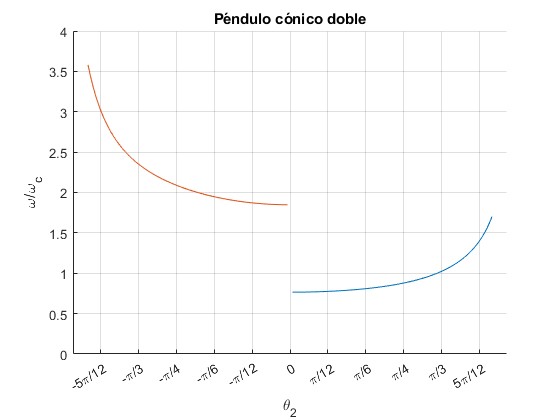
En la figura, apreciamos que la velocidad angular de rotación ω/ωc es mayor para el segundo modo θ2<0, que para el primero θ2>0,
Dada la velocidad angular de rotación ω/ωc, obtenemos θ1 y θ2 resolviendo el sistema de dos ecuaciones no lineales
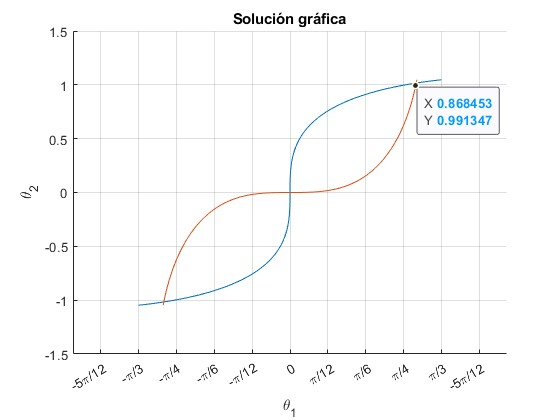
La solución gráfica para ω/ωc=1 es
w2=1^2; %cuadrado de la velocidad angular de rotación
hold on
f=@(x,y) w2*(sin(x)+sin(y))-tan(y);
fimplicit(f,[-pi/3,pi/3, -pi/3, pi/3])
f=@(x,y) w2*(2*sin(x)+sin(y))-2*tan(x);
fimplicit(f,[-pi/3,pi/3, -pi/3, pi/3])
grid on
xlabel('x')
ylabel('y')
title('Solución gráfica')
Utilizamos
... F=@(x) [w2*(sin(x(1))+sin(x(2)))-tan(x(2)), w2*(2*sin(x(1))+sin(x(2)))-2*tan(x(1))]; th=fsolve(F,[pi/6,pi/3]); disp(th)
El resultado es θ1=0.8724 (50.0°), θ2=1.0167 (58.2°) corresponde al primer modo
0.8724 1.0167
La solución gráfica para ω/ωc=2 es
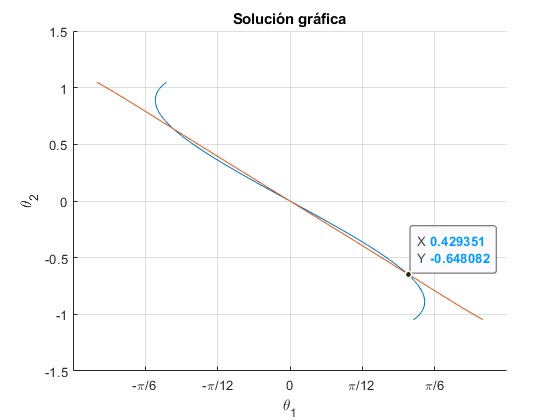
El resultado es θ1=0.4226 (24.2°), θ2=-0.6378 (-36.5°) corresponde al segundo modo
0.4226 -0.6378
Aproximación
Si los ángulos de desviación son pequeños, aproximamos tanθ≈sinθ≈θ
Calculamos el cuadrado de la velocidad angular de rotación para cada una de las raíces
El punto de sujección O dista d del eje de rotación
Las ecuaciones de equilibrio son similares, solamente cambia, r1=d+lsinθ1 y r2=d+lsinθ1+lsinθ2, tal como se aprecia en la figura
-
Equilibrio de la segunda partícula
Equilibrio de la primera partícula
Dado θ2 calculamos θ1 resolviendo la ecuación trascendente
Representamos la función
l=0.2; %longitud del péndulo
d=0.02; %distancia al eje
th_2=15*pi/180;
f=@(x) tan(th_2)*(2*sin(x)+sin(th_2)+2*d/l)-2*tan(x).*(d/l+sin(x)+sin(th_2));
fplot(f,[-pi/3,pi/3])
grid on
xlabel('\theta_1')
ylabel('f(\theta_1)')
title('Raíces')
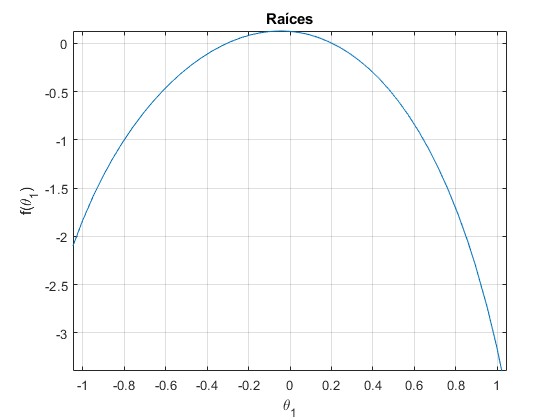
La ecuación trascendente f(θ1)=0 tiene dos raíces una positiva y otra negativa. Para el ángulo θ2=-12° la función es tangente al eje X. Para los ángulos -12° a 0° no corta al eje X, no hay raíces
Dado el ángulo θ2 calculamos θ1, utilizando la función
function pendulo_rotacion_6
l=0.2; %longitud del péndulo
d=0.02; %distancia al eje
hold on
ang_2=(1:80)*pi/180;
w=zeros(1,length(ang_2));
i=1;
for th_2=ang_2 %th_2>0
f=@(x) tan(th_2)*(2*sin(x)+sin(th_2)+2*d/l)-2*tan(x)*(d/l+sin(x)+
sin(th_2));
th_1=punto_medio(f,0, pi/2);
w(i)=sqrt(tan(th_2)/(d/l+sin(th_1)+sin(th_2)));
i=i+1;
end
plot(ang_2,w)
i=1;
for th_2=ang_2 %th_2>0
f=@(x) tan(th_2)*(2*sin(x)+sin(th_2)+2*d/l)-2*tan(x)*(d/l+sin(x)+
sin(th_2));
th_1=punto_medio(f,0, -pi/2);
w(i)=sqrt(tan(th_2)/(d/l+sin(th_1)+sin(th_2)));
i=i+1;
end
plot(ang_2,w)
ang_2=-(12:80)*pi/180; %th_2<0
w=zeros(1,length(ang_2));
i=1;
for th_2=ang_2
f=@(x) tan(th_2)*(2*sin(x)+sin(th_2)+2*d/l)-2*tan(x)*(d/l+sin(x)+
sin(th_2));
th_1=punto_medio(f,0, -pi/2);
w(i)=sqrt(tan(th_2)/(d/l+sin(th_1)+sin(th_2)));
i=i+1;
end
plot(ang_2,w)
i=1;
for th_2=ang_2
f=@(x) tan(th_2)*(2*sin(x)+sin(th_2)+2*d/l)-2*tan(x)*(d/l+sin(x)+
sin(th_2));
th_1=punto_medio(f,0, pi/2);
w(i)=sqrt(tan(th_2)/(d/l+sin(th_1)+sin(th_2)));
i=i+1;
end
plot(ang_2,w)
hold off
set(gca,'XTick',-5*pi/12:pi/12:5*pi/12)
set(gca,'XTickLabel',{'-5\pi/12','-\pi/3','-\pi/4','-\pi/6', '-\pi/12',
'0','\pi/12','\pi/6','\pi/4','\pi/3','-5\pi/12'})
grid on
ylim([0,4])
ylabel('\omega/\omega_c')
xlabel('\theta_2')
title('Péndulo cónico doble')
function m=punto_medio(f, a, b)
CERO=1e-10;
ERROR=0.001;
MAXITER=100;
for k=1:MAXITER
m=(a+b)/2;
ym=f(m);
if abs(ym)<CERO
break
elseif abs((a-b)/m)<ERROR
break
elseif (f(a)*ym)<0
b=m;
else
a=m;
end
end
if(i==MAXITER)
error('no se ha encontrado la raiz')
end
end
end
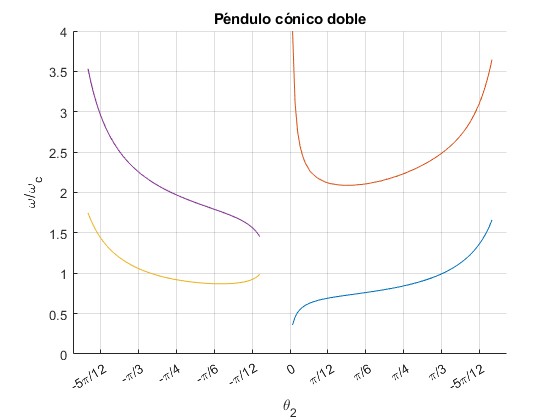
Para cada ángulo θ2 hay dos posibles velocidades angulares ω/ωc de rotación
Aproximación
Si los ángulos de desviación son pequeños, aproximamos tanθ≈sinθ≈θ
Péndulo cónico triple
Un péndulo cónico triple, consta de una varilla rígida de longitud l y de masa despreciable sujeta por uno de sus extremos al eje de rotación, se fija al otro extremo una partícula de masa m. En esta partícula se fija el extremo del segundo péndulo cónico de las mismas dimensiones. En la segunda partícula se fija el extremos del tercer péndulo cónico de las mismas dimensiones
En la figura, se muestra los tres modos de rotación.
- Primer modo, θ3>0
- Segundo modo, θ3<0
- Tercer modo, θ2<0
En la figura, se muestran las fuerzas sobre cada una de las dos partículas, T1, T2 y T3 son las tensiones de las varillas y F1=mω2r1, F2=mω2r2 y F3=mω2r3 las fuerzas centrífugas.
Equilibrio de la tercera partícula
Equilibrio de la segunda partícula
Equilibrio de la primera partícula
Dado θ3, calculamos θ2 y θ1, resolviendo el sistema de dos ecuaciones trascendentes
Aproximación
Si los ángulos de desviación son pequeños, aproximamos tanθ≈sinθ≈θ
Llamamos x=θ2/θ1, y=θ3/θ1. Tenemos que resolver el sistema de dos ecuaciones
Una raíz es x=-1.
Buscamos las tres raíces de la ecuación, 4x3-9x+3=0, con la función
x=roots([4,0,-9,3]); y=(2*x.^2-x-3)./(2*(1-x)); frec=sqrt(y./(1+x+y)); disp([x,y,frec])
-1.6450 0.7669 2.5080
1.2921 1.6312 0.6448
0.3529 -2.3981 1.5147
| Modo | θ2/θ1 | θ3/θ1 | ω/ωc |
|---|---|---|---|
| 1° | 1.2921 | 1.6312 | 0.6448 |
| 2° | 0.3529 | -2.3981 | 1.5147 |
| 3° | -1.6450 | 0.7669 | 2.5080 |
El estudio de tres o más péndulos se complica debido a que las ecuaciones que tenemos que resolver son no lineales
Referencias
Rod Cross. A conical pendulum model of a rotating chain. Eur. J. Phys. 42 (2021) 035007
Rod Cross. Rotational modes of a double conical pendulum. Eur. J. Phys. 44 (2023) 025004