

Una bola que rueda sobre una pista curvada que cuelga de un punto
A la izquierda de la figura, se representa una pista de masa M doblada en forma de cuarto de circunferencia cuyos extremos se cuelgan de un punto O mediante hilos. La sección trasversal de la pista tiene forma de V con el vértice de 90°. La bola de masa m y radio r0 rueda sin deslizar a lo largo de la pista.
Los puntos de contacto de la bola con la pista distan de su centro. De modo, que la distancia entre el punto O y la línea de rodadura es r+rc, tal como se muestra a la derecha de la figura.
El centro de la bola describe un arco de circunferencia de radio r y forma un ángulo φ con la dirección vertical. El centro de masas de la pista (punto de color negro) describe un arco de circunferencia de radio R y forma un ángulo ɸ con la dirección vertical tal como se muestra en la figura.
Centro de masa de una pista circular
Calculamos primero el centro de masa de una figura homogénea, de densidad constante, en forma de cuarto de círculo de radio R.
donde x·dy es el área del rectángulo en color azul.
La relación entre x e y es la ecuación de la circunferencia . El denominador es el área de un cuarto de círculo, πR2/4
Por simetría, xcm=ycm. El centro de masas se encuentra a una distancia R del origen en la bisectriz del primer cuadrante
Calculamos ahora, el centro de masas de la pista en forma de cuarto de circunferencia de radio interior R1 y radio exterior R2.
Con R1=19 cm y R2=20.9 cm, la distancia R desde el punto O al centro de masas de la pista es
R=17.97 cm
Momento de inercia de la pista circular
Calculamos el momento de inercia de un disco con un agujero en su centro de masa M y radios interior R1 y exterior R2, respecto de un eje perpendicular al plano del disco y que pasa por su centro.
Tomamos un elemento diferencial de masa que dista x del eje de rotación. El elemento es un anillo de radio x y de anchura dx. Si recortamos el anillo y lo extendemos, se convierte en un rectángulo de longitud 2πx y anchura dx, cuya masa es
El momento de inercia disco es
La pista en forma de cuarto de circunferencia tiene de radios interior R1=19 cm y R2=19+1.9=20.9 cm, su masa es de M=90 g, por lo que el momento de inercia es IO=3.59·10-3 kg m2.
Energía cinética y potencial de la pista
El ángulo ɸ mide la posición angular del centro de la pista respecto del eje vertical. En el equilibrio ɸ=0
La pista, de momento de inercia IO describe un movimiento de rotación con velocidad angular dɸ/dt alrededor de un eje perpendicular al plano de la pista que pasa por O. La energía cinética es
Situamos el nivel cero de energía potencial en el eje O. Cuando el c.m. de la pista se ha desviado un ángulo ɸ de la vertical, su energía potencial es E1p=-MgRcosɸ.
Energía cinética y potencial de la bola
La posición angular del centro de la bola, medida desde la dirección vertical es φ, su velocidad es r·dφ/dt.
Cuando una bola de radio rc rueda sin deslizar sobre una superficie horizontal, el punto de contacto P está en reposo vP=0. La velocidad del punto P es la suma de la velocidad de traslación del centro vc y rcdθ/dt (de sentido contrario) donde dθ/dt es la velocidad angular de rotación alrededor de un eje perpendicular que pasa por el centro. La relación entre ambas velocidades (traslación y rotación) es vP=vc+rc·dθ/dt=0
Para el observador inercial, la bola se mueve sobre la pista, el punto de contacto P de la bola con la pista describe un arco de circunferencia de radio (r+rc) con velocidad (r+rc)·dɸ/dt. El centro de la bola describe un arco de circunferencia de radio r con velocidad rdφ/dt, la relación entre velocidades se escribe
La energía cinética de la bola es la suma de la energía cinética de traslación del centro y la energía cinética de rotación alrededor de un eje que pasa por el centro. Sabiendo que el momento de inercia de una esfera es 2mR2/5.
Situamos el nivel cero de energía potencial en el eje O. Cuando el centro de la bola se ha desviado un ángulo φ de la vertical su energía potencial es E2p=-mgrcosφ.
Ecuaciones del movimiento
La energía total E1k+E2k+E1p+E2p del sistema bola-pista se conserva
La energía total se deberá mantener constante e igual a la energía inicial durante todo el movimiento.
Teniendo en cuenta la relación entre las velocidades angulares dɸ/dt, dφ/dt y dθ/dt, deducida en el apartado anterior, la energía del sistema se expresa
La lagrangiana L=Ek-Ek
Las ecuaciones del movimiento son,
Tenemos que resolver el sistema de dos ecuaciones diferenciales
Con las condiciones iniciales siguientes: En el instante t=0, la bola y la pista parten del reposo, dφ/dt=0 y dɸ/dt=0, desde las posiciones ɸ=ɸ0 y φ=φ0.
Para integrar el sistema de dos ecuaciones difrenciales, despejamos las derivadas segundas de los ángulos φ y ɸ en el sistema de dos ecuaciones diferenciales
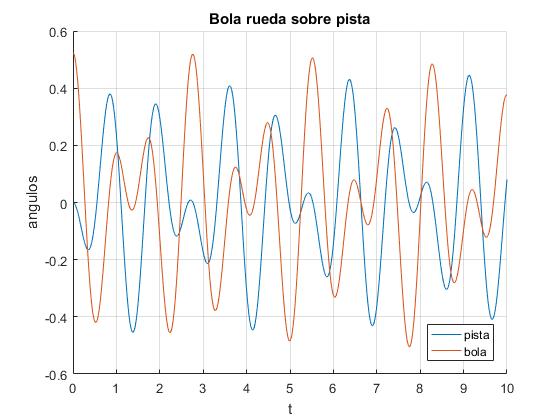
Resolvemos el sistema de dos ecuaciones diferenciales de segundo orden utilizando el procedimiento ode45 de MATLAB. En el instante t=0, se desvía la bola un ángulo φ0=π/6 (30°), la pista no se desvía, ɸ0=0 y se suelta. La bola y la pista oscilan, representándose las posiciones angulares del c.m. de la pista ɸ y del centro de la bola φ en función del tiempo t
Con los datos que aparecen al principio del script:
- Momento de inercia de la pista, I=3.59·10-3 kgm2
- Masa de la pista, M= 90 g
- El centro de masas de la pista describe un arco de circunferencia de radio, R=17.97 cm
- Radio de la bola, r0= 1.27 cm
- Masa de la bola, m=67 g
- Distancia entre el centro de la bola y la pista, rc=0.898 cm
- El centro de la bola describe un arco de circunferencia de radio, r=18.4 cm
I=3.59e-3; %momento de inercia de la pista
M=0.090; %masa de la pista
r0=1.27/100; %radio de la bola
m=0.067; %masa de la bola
rc=r0/sqrt(2); %contacto bola-pista
r=18.4/100; %radio del centro de la bola
R=17.97/100; %centro de masas de la pista
%coeficientes
B=I+2*m*r0^2*(rc+r)^2/(5*rc^2);
C=2*m*r0^2*r*(r+rc)/(5*rc^2);
D=m*r^2+2*m*r0^2*r^2/(5*rc^2);
%condiciones iniciales
xPista=0;
xBola=pi/6;
%xPista=10*pi/180;
%xBola=11.5566*pi/180; %modo normal 1
%xBola=-10.8690*pi/180; %modo normal 2
% x(3) es phi, x(4) es dphi/dt, x(1) es rh, x(2) es drh/dt
fg=@(t,x)[x(2);(D*M*9.8*R*sin(x(1))+C*m*9.8*r*sin(x(3)))/(C^2-B*D); x(4);
(C*M*9.8*R*sin(x(1))+B*m*9.8*r*sin(x(3)))/(C^2-B*D)];
[t,x]=ode45(fg,[0,10],[xPista,0,xBola,0]); % la bola se desvía un radián
hold on
plot(t,x(:,1))
plot(t,x(:,3))
hold off
grid on
legend('pista','bola', 'location','southeast');
ylabel('angulos')
xlabel('t')
title('Bola rueda sobre pista')
Añadimos al script, el cálculo de la energía inicial E0 y de la energía en cualquier instante E. El mayor tanto por ciento de error, , es muy pequeño, de este modo, verificamos el procedimiento numérico
... Einicial=-m*9.8*r*cos(xBola)-M*9.8*R; % la bola se desvía un radián E=I*x(:,2).^2/2+m*r^2*x(:,4).^2/2+(m*r0^2/5)*((rc+r)*x(:,2)/rc-r*x(:,4)/rc).^2 -M*9.8*R*cos(x(:,1))-m*9.8*r*cos(x(:,3)); max(abs(100*(Einicial-E)/Einicial)) %error máximo en el intervalo de tiempo especificado
ans = 0.0980
Para las siguientes condiciones iniciales, en comentarios en el código, observamos los modos normales de vibración:
- Primer modo normal de vibración: ɸ0=10·π/180 (10 grados), φ0=11.5566·π/180
- Segundo modo normal de vibración: ɸ0=10·π/180 (10 grados), φ0=-10.8690·π/180
Modos normales de vibración
Si nos restringimos a pequeños valores de los ángulos sinφ≈φ y sinɸ≈ɸ, el sistema de ecuaciones diferenciales se transforma en
Ensayamos una solución de la forma ɸ=A1sin(ωt), φ=A2sin(ωt)
Se trata de un sistema homogéneo de dos ecuaciones con dos incógnitas, por lo que
La forma general de la posición angular ɸ del centro de masas de la pista, en función del tiempo t es una combinación de los dos modos normales de vibración
ɸ(t)=A1sin(ω1t)+ B1cos(ω1t)+ C1sin(ω2t)+ D1cos(ω2t)
Lo mismo para la posición angular del centro de la bola, φ
φ(t)=A2sin(ω1t)+ B2cos(ω1t)+ C2sin(ω2t)+ D2cos(ω2t)
Derivando con respecto del tiempo obtenemos la expresión de las velocidades angulares
Las condiciones iniciales en el instante
dan lugar a cuatro ecuaciones
Derivando las velocidades angulares, obtenemos las aceleraciones angulares
Relacionamos los coeficientes A1 y A2, B1 y B2, C1 y C2, D1 y D2, calculando la derivada segunda de ɸ, la derivada segunda de φ e introduciéndolos en una de las dos ecuaciones diferenciales del movimiento
Llegamos a otras cuatro relaciones
En el sistema de ocho ecuaciones con ocho incógnitas, despejamos los coeficientes, A1, A2, B1, B2, C1, C2, D1 y D2
Lo primero que vemos son los coeficientes que se hacen nulos
quedando reducido el sistema a cuatro ecuaciones
cuya solución es
Las posiciones angulares en función del tiempo t del centro de masas de la pista y del centro de la bola son:
ɸ(t)=B1cos(ω1t)+ D1cos(ω2t)
φ(t)=B2cos(ω1t)+D2cos(ω2t)
Modos normales de vibración
-
El modo 1 de frecuencia angular ω1, se obtiene cuando D2=0 y por tanto, D1=0. La relación entre los ángulos iniciales de desviación es
-
El modo 2 de frecuencia angular ω2, se obtiene cuando B2=0 y por tanto, B1=0. La relación entre los ángulos iniciales de desviación es
La posición angular en función del tiempo t es
ɸ(t)=ɸ0cos(ω1t)
φ(t)=φ0cos(ω1t)
La posición angular en función del tiempo t es
ɸ(t)=ɸ0cos(ω2t)
φ(t)=φ0cos(ω2t)
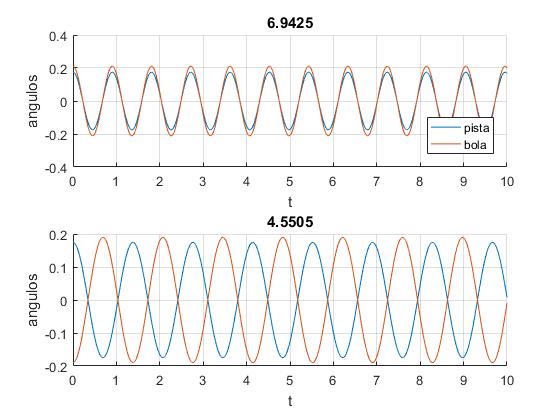
Con los mismos datos que aparecen al principio del script y que hemos utilizado anteriormente. Calculamos las frecuencias ω1 y ω2 de los modos normales de vibración
Si desplazamos la pista ɸ0= 10·180/π (10 grados)
- El primer modo de frecuencia ω1, se observa cuando el centro de la bola se desplaza φ0=0.2107 (11.56 grados)
- El segundo modo de frecuencia ω2, se observa cuando el centro de la bola se desplaza φ0=-0.1897 (-10.87 grados)
Representamos los dos modos de vibración, en el título de cada uno de los gráficos se proporciona la frecuencia angular
I=3.59e-3; %momento de inercia de la pista
M=0.090; %masa de la pista
r0=1.27/100; %radio de la bola
m=0.067; %masa de la bola
rc=r0/sqrt(2); %contacto bola-pista
r=18.4/100; %radio del centro de la bola
R=17.97/100; %centro de masas de la pista
%coeficientes
B=I+2*m*r0^2*(rc+r)^2/(5*rc^2);
C=2*m*r0^2*r*(r+rc)/(5*rc^2);
D=m*r^2+2*m*r0^2*r^2/(5*rc^2);
%frecuencias de los modos normales de oscilación
w1=sqrt((M*9.8*R*D+m*9.8*r*B+sqrt((M*9.8*R*D+m*9.8*r*B)^2-
4*(B*D-C^2)*M*m*9.8^2*R*r))/(2*(B*D-C^2)));
w2=sqrt((M*9.8*R*D+m*9.8*r*B-sqrt((M*9.8*R*D+m*9.8*r*B)^2-
4*(B*D-C^2)*M*m*9.8^2*R*r))/(2*(B*D-C^2)));
%ángulo inicial de la pista
rh_0=10*pi/180;
%primer modo, frecuencia w1
phi_0=C*w1^2*rh_0/(D*w1^2-m*9.8*r); %ángulo de la bola
subplot(2,1,1)
hold on
fplot(@(t) rh_0*cos(w1*t),[0,10])
fplot(@(t) phi_0*cos(w1*t),[0,10])
hold off
grid on
xlabel('t')
ylabel('angulos')
legend('pista','bola', 'location','southeast');
title(num2str(w1))
%segundo modo, frecuencia w2
phi_0=C*w2^2*rh_0/(D*w2^2-m*9.8*r); %ángulo de la bola
subplot(2,1,2)
hold on
fplot(@(t) rh_0*cos(w2*t),[0,10])
fplot(@(t) phi_0*cos(w2*t),[0,10])
hold off
grid on
xlabel('t')
ylabel('angulos')
title(num2str(w2))
Actividades
Se han fijado los siguientes parámetros:
- Momento de inercia de la pista, I=3.59·10-3 kgm2
- Masa de la pista, M= 90 g
- El centro de masas de la pista describe un arco de circunferencia de radio, R=17.97 cm
- Radio de la bola, r0= 1.27 cm
- Masa de la bola, m=67 g
- Distancia entre el centro de la bola y la pista, rc=0.898 cm
- El centro de la bola describe un arco de circunferencia de radio, r=18.4 cm
Se introduce
- El ángulo inicial de desviación de la pista, ɸ0 en grados, en el control titulado Angulo pista
- El ángulo inicial de desviación de la bola, φ0 en grados, en el control titulado Angulo bola
Se pulsa el botón titualdo Nuevo
Se observa el movimiento oscilatorio de la pista y la bola rodando sobre la pista
Si activamos la casilla titulada Gráfica y pulsamos el botón titulado Nuevo, observamos la representación gráfica de los ángulos de desviación de la pista ɸ (en azul) y de la bola φ (en rojo) medidos desde la vertical, en función del tiempo t
Cuando desplazamos la pista, ɸ0= 10·180/π (10 grados)
Se resuelve el sistema de ecuaciones diferenciales por el procedimiento de Runge-Kutta. Se compara la energía inicial con la energía del sistema en cada instante. Se calcula y se muestra el error, que hemos definido en la primera sección y que se debrá se casi nulo
- El primer modo de frecuencia ω1, se observa cuando el centro de la bola se desplaza φ0=0.2107 (11.56 grados)
- El segundo modo de frecuencia ω2, se observa cuando el centro de la bola se desplaza φ0=-0.1897 (-10.87 grados)
Referencias
R. E. Benenson, B. B. Marsh. Coupled oscillations of a ball and curved-track pendulum. Am. J. Phys. 56 (4) April 1988. pp. 345-348