

Ajuste de datos (no lineal)
En la página anterior, se han ajustado datos a funciones no lineales (función potencial y función exponencial) pero que se pueden transformar en funciones lineales. En esta página, vamos a estudiar algunos ejemplos de ajuste a funciones no lineales
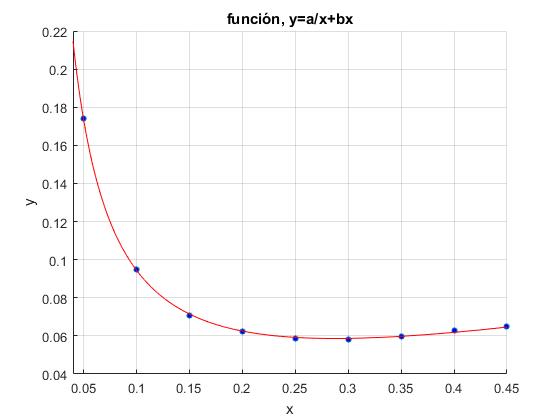
Función y=a/x+bx
La función
aparece en el estudio del péndulo compuesto, con y=P2/(4·π2) y x es la distancia entre el centro de masas c.m. y el centro de oscilación O. P es el periodo de oscilación del péndulo compuesto cuando su amplitud es pequeña.
Dada una tabla de valores xj e yj se trata de calcular los valores de los coeficientes a y de b que mejor ajustan a los datos experimentales. El procedimiento aplicado es similar a la regresión lineal
Si (xj, yj) son las coordenadas de un dato experimental, a la abscisa xj le correspondería la ordenada y=a/xj+bxj. La diferencia es
Calcularemos los valores de los parámetros a y b que hacen que la suma
sea mínima.
Resolvemos el sistema de dos ecuaciones con dos incógnitas, para determinar los coeficientes a y b.
Medimos el periodo Pi de péndulo para cada posición xi, completando una tabla con N pares de datos
| x (cm) | P (s) |
|---|---|
| 5 | 2.620 |
| 10 | 1.936 |
| 15 | 1.668 |
| 20 | 1.568 |
| 25 | 1.520 |
| 30 | 1.512 |
| 35 | 1.536 |
| 40 | 1.576 |
| 45 | 1.600 |
Creamos un script con MATLAB para calcular los valores de a y b. Representamos los datos experimentales y la función que mejor ajusta
x=(5:5:45)/100;
y=[2.620, 1.936, 1.668, 1.568, 1.520, 1.512, 1.536, 1.576, 1.600].^2/(4*pi^2);
m=length(x);
b=(m*sum(y./x)-sum(1./x.^2)*sum(x.*y))/(m^2-sum(x.^2)*sum(1./x.^2));
a=(sum(x.*y)-b*sum(x.^2))/m;
hold on
%representa los datos experimentales
plot(x,y,'bo','markersize',4,'markerfacecolor','b')
% función
f_ajuste=@(x) a./x+b*x;
fplot(f_ajuste,[0.04,0.45],'r')
title('función, y=a/x+bx')
xlabel('x')
ylabel('y')
grid on
hold off
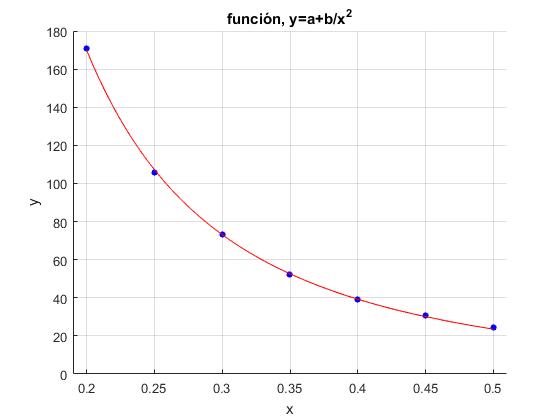
Función, y=a+b/x2
En una experiencia de laboratorio, colocamos un sensor, a una distancia x de la fuente de luz, que vamos cambiando. Obtenemos la siguiente tabla:
| Distancia x a la fuente de luz (cm) | Intensidad I(lux) |
|---|---|
| 0.20 | 171 |
| 0.25 | 106 |
| 0.30 | 73 |
| 0.35 | 52 |
| 0.40 | 39 |
| 0.45 | 30.5 |
| 0.50 | 24.5 |
Otros ejemplos de este ajuste de datos es la dependencia del índice de refracción de un vidrio con la longitud de onda, o del agua de una gota.
Queremos ajustar m pares de datos (xi,yi) a la función
de modo que la suma S sea mínima
Resolvemos el sistema de dos ecuaciones con dos incógnitas. Creamos la matriz
x=0.2:0.05:0.5;
y=[171,106,73,52,39,30.5,24.5];
A=[length(x),sum(1./x.^2); sum(1./x.^2),sum(1./x.^4)];
B=[sum(y);sum(y./x.^2)];
X=A\B; % X(1) es a y X(2) es b
hold on
plot(x,y,'bo','markersize',4,'markerfacecolor','b')
f_ajuste=@(x) X(1)+X(2)./x.^2;
fplot(f_ajuste,[x(1),x(end)],'r')
axis([0.19,0.51, 0,180])
grid on
xlabel('x')
ylabel('y')
title('función, y=a+b/x^2')
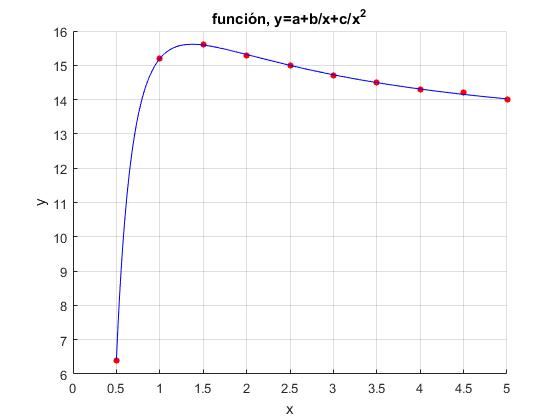
Función, y=a+b/x+c/x2
Queremos ajustar los siguientes pares de datos
| x | 0.5 | 1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 4.5 | 5 |
|---|---|---|---|---|---|---|---|---|---|---|
| y | 6.4 | 15.2 | 15.6 | 15.3 | 15.0 | 14.7 | 14.5 | 14.3 | 14.2 | 14.0 |
a la función
de modo que la suma S sea mínima
x=0.5:0.5:5;
y=[6.4,15.2,15.6,15.3,15.0,14.7, 14.5,14.3, 14.2,14.0];
A=[length(x),sum(1./x), sum(1./x.^2); sum(1./x),sum(1./x.^2), sum(1./x.^3);
sum(1./x.^2),sum(1./x.^3), sum(1./x.^4)];
B=[sum(y);sum(y./x);sum(y./x.^2)];
X=A\B; % X(1) es a, X(2) es b y X(3) es c
hold on
plot(x,y,'ro','markersize',4,'markerfacecolor','r')
f_ajuste=@(x) X(1)+X(2)./x+X(3)./x.^2;
fplot(f_ajuste,[x(1),x(end)],'b')
axis([0,5, 6,16])
grid on
xlabel('x')
ylabel('y')
title('función, y=a+b/x+c/x^2')
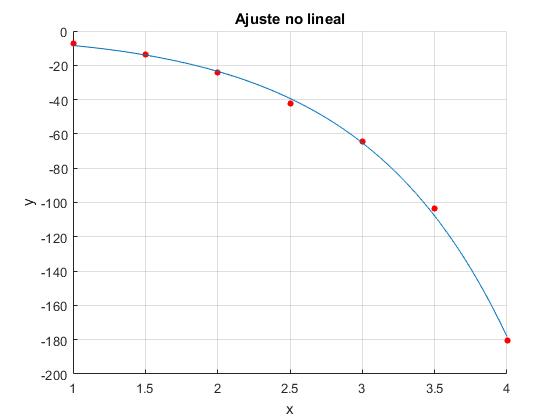
Función y=a·lnx+b·cosx+c·ex
Supongamos que queremos ajustar los datos (xj,yj), j=1,2,...m
| x | 1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 |
|---|---|---|---|---|---|---|---|
| y | -7.3 | -13.9 | -24.2 | -42.1 | -64.7 | -103.5 | -180.3 |
a la función y=a·lnx+b·cosx+c·ex de modo que la suma S sea mínima
Escribimos el sistema de tres ecuaciones con tres incógnitas de forma matricial
Con las funciones a ajustar ln(x), cos(x) y exp(x) y el vector x de las abscisas de los pares de datos, creamos la matriz V. Despejamos el vector columna a de las incógnitas (a,b,c) utilizando el operador división por la izquierda \ en la relación (VT·V)a=VT·Y. Siendo Y el vector columna de las ordenadas
x=1:0.5:4;
y=[-7.3,-13.9,-24.2,-42.1,-64.7,-103.5,-180.3];
V=zeros(length(x),3);
V(:,1)=log(x);
V(:,2)=cos(x);
V(:,3)=exp(x);
a=(V'*V)\(V'*y');
hold on
plot(x,y,'ro','markersize',4,'markerfacecolor','r')
z=@(x) a(1)*log(x)+a(2)*cos(x)+a(3)*exp(x);
fplot(z,[x(1),x(end)])
xlabel('x')
ylabel('y')
grid on
title('Ajuste no lineal')
hold off
Ilustramos este procedimiento con un ejemplo más. Ajustamos los datos (xj, yj) j=1,2...m de la tabla a la función y=a+b·cos(2πt)+c·sin(2πt)+d·cos(4πt)
| x | 0 | 0.125 | 0.25 | 0.375 | 0.5 | 0.625 | 0.75 | 0.875 |
|---|---|---|---|---|---|---|---|---|
| y | 2.2 | 2.8 | 6.1 | 3.9 | 0.0 | -1.1 | 0.6 | 1.1 |
Creamos la matriz V
Despejamos el vector a columna de las incógnitas utilizando el operador \
x=0:0.125:0.875;
y=[2.2,2.8,6.1,3.9,0,-1.1,0.6,1.1];
V=zeros(length(x),4);
V(:,1)=1;
V(:,2)=cos(2*pi*x);
V(:,3)=sin(2*pi*x);
V(:,4)=cos(4*pi*x);
a=(V'*V)\(V'*y');
hold on
plot(x,y,'ro','markersize',4,'markerfacecolor','r')
z=@(x) a(1)+a(2)*cos(2*pi*x)+a(3)*sin(2*pi*x)+a(4)*cos(4*pi*x);
fplot(z,[x(1),x(end)])
xlabel('x')
ylabel('y')
grid on
title('Ajuste no lineal')
hold off
>> (V'*V)
ans =
8.0000 -0.0000 -0.0000 -0.0000
-0.0000 4.0000 0.0000 -0.0000
-0.0000 0.0000 4.0000 0.0000
-0.0000 -0.0000 0.0000 4.0000
>> a
a =
1.9500
0.7445
2.5594
-1.1250
En la siguiente página, estudiaremos cómo se ajustan los datos a funciones armónicas, cuando las abscisas xj están igualmente espaciadas, lo que nos permitirá prescindir de la matriz V calculando las incógnitas a,b,c,d de una forma más sencilla ya que como podemos observar la matriz V'*V es diagonal
Ajuste mediante nlinfit o fminsearch
La función
Sea y=f(x) el modelo de función dependiente de uno o más parámetros a(1), a(2),..., a la que queremos ajustar los datos. Definimos la función error
Donde (xi, yi) son los pares de datos y n el número de datos. fminsearch, calcula el valor de los parámetros a(i) de la función y=f(x), que hacen que la función error Er sea mínima
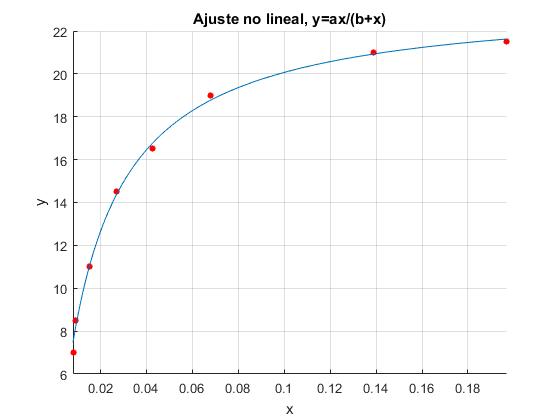
Ejemplo 1
En un experimento hemos obtenido los siguientes datos:
| x | 0.008 | 0.009 | 0.015 | 0.027 | 0.0427 | 0.068 | 0.139 | 0.197 |
|---|---|---|---|---|---|---|---|---|
| y | 7 | 8.5 | 11 | 14.5 | 16.5 | 19 | 21 | 21.5 |
calculamos los parámetros a y b a partir del ajuste de datos por el procedimiento de mínimos cuadrados implementado en la función MATLAB nlinfit, tomando como modelo la función
x=[0.008,0.009,0.015,0.027,0.0427,0.068,0.139,0.197];
y=[7,8.5,11,14.5,16.5,19,21,21.5];
hold on
plot(x,y,'ro','markersize',4,'markerfacecolor','r')
f=@(a,x) a(1)*x./(a(2)+x);
a0=[23,0.02]; %valor inicial
af=nlinfit(x,y,f,a0)
g=@(x) f(af,x);
fplot(g,[x(1),x(end)])
title('Ajuste no lineal, y=ax/(b+x)')
xlabel('x')
ylabel('y')
grid on
hold off
Corremos el script en la ventana de comandos
af = 23.5104 0.0171
Alternativamente, con
x=[0.008,0.009,0.015,0.027,0.0427,0.068,0.139,0.197];
y=[7,8.5,11,14.5,16.5,19,21,21.5];
hold on
plot(x,y,'ro','markersize',4,'markerfacecolor','r')
f=@(a,x) a(1)*x./(a(2)+x);
error=@(a) sum((y-f(a,x)).^2);
a0=[23,0.02]; %valor inicial
af=fminsearch(error,a0);
g=@(x) f(af,x);
fplot(g,[x(1),x(end)])
title('Ajuste no lineal, y=ax/(b+x)')
xlabel('x')
ylabel('y')
grid on
hold off
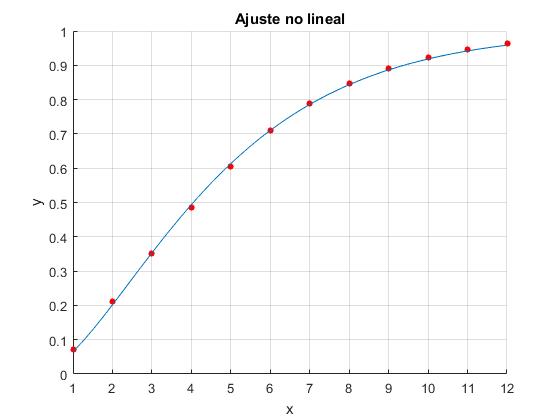
Ejemplo 2
En un experimento hemos obtenido los siguientes datos:
| x | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| y | 0.07 | 0.21 | 0.35 | 0.485 | 0.605 | 0.71 | 0.79 | 0.847 | 0.89 | 0.924 | 0.946 | 0.963 |
Calculamos los parámetros a y b a partir del ajuste de datos por el procedimiento de mínimos cuadrados implementado en la función MATLAB
x=1:12;
y=[0.07 0.21 0.35 0.485 0.605 0.71 0.79 0.847 0.89 0.924 0.946 0.963];
hold on
plot(x,y,'ro','markersize',4,'markerfacecolor','r')
f=@(a,x) 1-(a(1)*exp(-x/a(1))-a(2)*exp(-x/a(2)))/(a(1)-a(2));
a0=[2 1]; %valor inicial
af=nlinfit(x,y,f,a0)
g=@(x) f(af,x);
fplot(g,[x(1),x(end)])
title('Ajuste no lineal')
xlabel('x')
ylabel('y')
grid on
hold off
Corremos el script en la ventana de comandos
af = 2.4120 2.4119
Alternativamente, con
x=1:12;
y=[0.07 0.21 0.35 0.485 0.605 0.71 0.79 0.847 0.89 0.924 0.946 0.963];
hold on
plot(x,y,'ro','markersize',4,'markerfacecolor','r')
f=@(a,x) 1-(a(1)*exp(-x/a(1))-a(2)*exp(-x/a(2)))/(a(1)-a(2));
error=@(a) sum((y-f(a,x)).^2);
a0=[2 1]; %valor inicial
af=fminsearch(error,a0);
g=@(x) f(af,x);
fplot(g,[x(1),x(end)])
title('Ajuste no lineal')
xlabel('x')
ylabel('y')
grid on
hold off
Ejemplo 3
Consideremos un tubo de longitud L y sección S abierto por la parte inferior y cerrado por la parte superior. Lo introducimos en un fluido de densidad ρ conocida. A medida que sumergimos el tubo, el aire atrapado en su interior (en color amarillo) se comprime.
Sea p0=101 300 N/m2 la presión atmósférica. Sea h la posición del extremo inferior del tubo e y la posición de la superficie de separación entre el fluido y el aire atrapado en el tubo. Ambas longitudes se miden desde la superficie libre del fluido tal como se muestra en la figura
Suponiendo una transformación isotérmica, como se ha explicado al final de la página titulada Aplicaciones de la ecuación fundamental de la estática de fluidos, la relación entre x (altura de la columna de aire) y h (profundidad del tubo) es
Despejamos x en función de h
Conocida la presión atmosférica p0=101 300 N/m2, la longitud del tubo, L=90 cm y la densidad del fluido agua ρ=1000 kg/m3, procedemos a un ajuste no lineal para obtener la aceleración g de la gravedad. Denominamos al parámetro a=p0/(ρ·g)
El programa interactivo, genera los valores de x (altura de la columna de aire) en cm en función de h (profundidad del tubo), en cm, pulsando el botón titulado Medida
Las medidas tomadas han sido las siguientes:
| h (cm) | 40 | 60 | 80 | 100 | 120 | 140 | 160 | 180 | 200 |
|---|---|---|---|---|---|---|---|---|---|
| x (cm) | 86.9 | 85.4 | 84.0 | 82.6 | 81.3 | 79.9 | 78.7 | 77.5 | 76.3 |
x=(40:20:200)/100; %profundidad
y=[86.9, 85.4, 84.0, 82.6, 81.3, 79.9, 78.7, 77.5,76.3]/100; %altura aire
L=90/100; %longitud del tubo
p0=101300; %presión atmosférica
rho=1000; %densidad del agua
hold on
plot(x,y,'ro','markersize',4,'markerfacecolor','r')
f=@(a,x) (-(a-L+x)+sqrt((a-L+x).^2+4*a*L))/2;
error=@(a) sum((y-f(a,x)).^2);
a0=10; %valor inicial
af=fminsearch(error,a0);
disp(p0/(af*rho))
g=@(x) f(af,x);
fplot(g,[x(1),x(end)])
hold off
grid on
xlabel('h (m)')
ylabel('x (m)')
title('Medida de la aceleración de la gravedad')
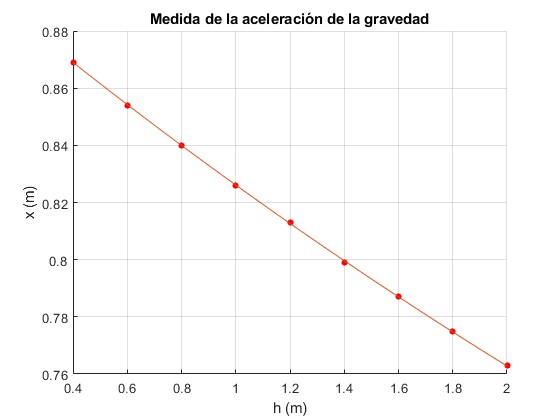
9.7813
La aceleración de la gravedad es, g=9.7813 m/s2
Ejemplos en el curso de Física. Ajuste no lineal: nlinfit o fminsearch
Modelo PREM del interior de la Tierra
Fuerza magnética sobre conductor rectilíneo. La balanza de corriente
Medida de la difusividad térmica
Análisis de las alturas y periodos de las olas
Función de distribución de Weibull