

Escalera apoyada en dos paredes perpendiculares. La vertical es lisa
Escalera apoyada en dos paredes perpendiculares. La vertical es lisa
Estática
Para resolver el problema supondremos que Fy=0, en la pared vertical no hay rozamiento.
Cuando la escalera forma un ángulo θ con la vertical las ecuaciones de equilibrio son:
-
La resultante de la fuerzas debe ser cero.
-
El momento de las fuerzas respecto de cualquier punto (por ejemplo el extremo inferior de la escalera) es cero.
Conocido el ángulo θ, despejamos la fuerza de rozamiento Fr que impide que el extremo inferior deslice a lo largo de la pared horizontal
A medida que se incrementa el ángulo θ, se inclina cada vez más la escalera, la fuerza de rozamiento aumenta. Alcanza su valor máximo cuando
Fr=μsN= μsmg
Donde μs es el coeficiente estático
El ángulo límite θs a partir del cual la escalera empieza a deslizar es
tanθs=2μs
Dinámica
Si el ángulo que forma la escalera es mayor que el límite, θ0>θs la escalera empieza a deslizar. La fuerza de rozamiento Fr=μN en el extremo inferior de la escalera disminuye ligeramente, ya que el coeficiente cinético μ suele ser menor que el estático μs
El movimiento de la escalera consta de dos etapas:
El extremo superior de la escalera permanece en contacto con la pared vertical
-
Movimiento de traslación del cm.
-
Movimiento de rotación alrededor de un eje perpendicular al plano de la escalera que pasa por el centro de masas
con Ic=mL2/12, se supone que la escalera es una varilla homogénea de masa m y longitud L
La posición del centro de masas es (x, y). Mientras el extremo superior de la escalera está apoyado en la pared vertical Fx>0, hay una relación entre x, y y el ángulo θ.
Derivamos dos veces respecto del tiempo
Despejamos Fx y N en las ecuaciones del movimiento del c.m.
Introducimos N, Fx y Fr=μN en la ecuación de la dinámica de rotación.
El mismo resultado que obtuvimos en la página titulada Escalera apoyada en dos paredes perpendiculares con μB=0
Se resuelve la ecuación diferencial por procedimientos numéricos con las siguientes condiciones iniciales: En el instante t=0, dθ/dt=0, θ=θ0.
Sea una escalera de longitud L=1 m, el coeficiente de rozamiento μ=0.3 entre en el apoyo de la escalera en el suelo, el ángulo inicial θ0=35°>θs=30.9°. Resolvemos la ecuación diferencial del movimiento, utilizando la función ode45 de MATLAB, interrumpimos el proceso de integración cuando la escalera llega al suelo θ=π/2
function [value,isterminal,direction]=stop_escalera_1(t,x)
value=x(1)-pi/2;
isterminal=1;
direction=1;
end
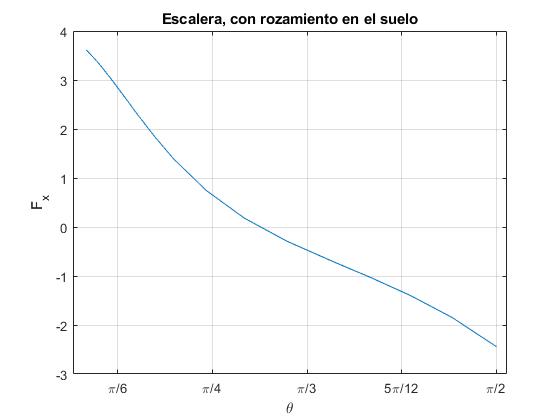
Representamos la reacción Fx en la pared vertical en función del ángulo θ
L=1; %longitud de la escalera
th_0=35*pi/180; %ángulo inicial
mu=0.3; %coeficiente de rozamiento
f=@(t,x) [x(2);(9.8*(sin(x(1))-2*mu*cos(x(1)))/L+mu*cos(x(1))^2*x(2)^2)
/(2/3-mu*sin(x(1))*cos(x(1)))];
opts=odeset('events',@stop_escalera_1);
[t,x]=ode45(f,[0,1],[th_0,0],opts);
acel=(9.8*(sin(x(:,1))-2*mu*cos(x(:,1)))/L+mu*(cos(x(:,1)).^2).*(x(:,2).^2)).
/(2/3-mu*sin(x(:,1)).*cos(x(:,1)));
Fx=mu*9.8+L*((cos(x(:,1))-mu*sin(x(:,1))).*acel-(sin(x(:,1))+mu*cos(x(:,1))).
*(x(:,2).^2))/2;
plot(x(:,1), Fx);
set(gca,'XTick',0:pi/12:pi/2)
set(gca,'XTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
ylabel('F_x')
xlabel('\theta')
title('Escalera, con rozamiento en el suelo')
Observamos que la fuerza horizontal que ejerce la pared vertical Fx va disminuyendo hasta que se hace cero en el instante tl. El ángulo que forma la escalera con la vertical es θl
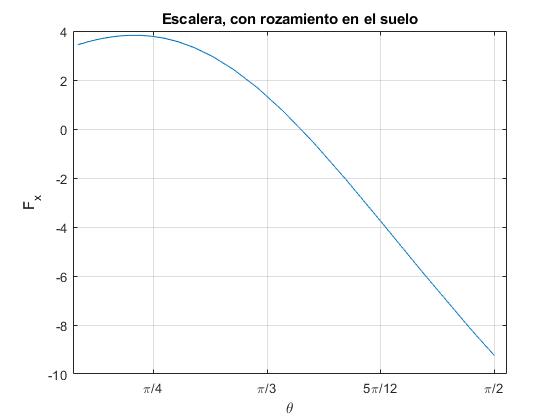
La reacción Fx se hace cero para θl=65° aproximadamente. Para este ángulo la velocidad angular de rotación es (dθ/dt)l. La velocidad horizontal del centro de masas es
que son las velocidades iniciales para la segunda etapa del movimiento
El extremo superior de la escalera deja de estar en contacto con la pared vertical
Las ecuaciones del movimiento son
-
Movimiento de traslación del centro de masas
-
Movimiento de rotación alrededor de un eje que pasa por el centro de masas
La ordenada y del centro de masas es
Derivamos dos veces respecto del tiempo
Despejamos la reacción N
Introducimos la expresión de N en la ecuación de la dinámica de rotación y en la de traslación del c.m. Obtenemos el sistema de dos ecuaciones diferenciales de segundo orden
El mismo resultado que obtuvimos en la página titulada Escalera apoyada en dos paredes perpendiculares con μA=μ
Movimiento completo
El movimiento de la escalera desde la posición inicial θ0>θs hasta la posición final π/2, se describe mediante ecuaciones diferenciales de segundo orden:
la primera, en el intervalo (θ0, θl)
la segunda, en el intervalo (θl, π/2)
Definimos dos funciones: una función que detenga el primer proceso de integración cuando se alcance el ángulo θl y de comienzo al segundo proceso de integración y otra que detenga la integración para el ángulo π/2
function [value,isterminal,direction]=stop_escalera_2(t,x, mu, L)
acel=3*(9.8*((1-mu^2)*sin(x(1))-2*mu*cos(x(1)))/L+mu*x(2)^2)/(2-mu^2);
N_B=mu*9.8/(1+mu^2)+L*((cos(x(1))-mu*sin(x(1)))*acel-(sin(x(1))+
mu*cos(x(1)))*x(2)^2)/(2*(1+mu^2));
value=N_B;
isterminal=1;
direction=-1;
end
function [value,isterminal,direction]=stop_escalera_1(t,x)
value=x(1)-pi/2;
isterminal=1;
direction=1;
end
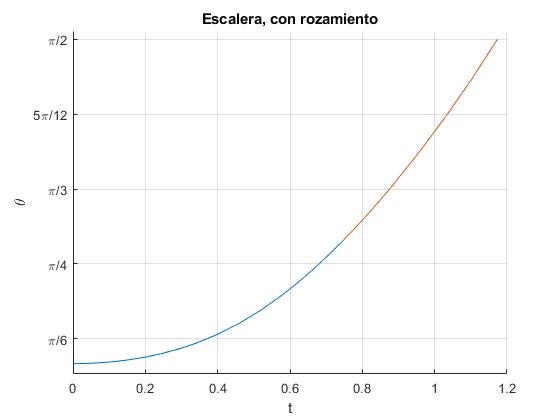
Consideremos una escalera de longitud L=1, que se suelta cuando forma un ángulo θ0=35° con la vertical. Representamos el ángulo θ que hace la escalera con la dirección vertical en función del tiempo t
L=1; %longitud de la escalera+
mu=0.3; %empieza a deslizar con 31º
th_0=35*pi/180; %ángulo inicial
f=@(t,x) [x(2);(9.8*(sin(x(1))-2*mu*cos(x(1)))/L+mu*cos(x(1))^2*x(2)^2)
/(2/3-mu*sin(x(1))*cos(x(1)))];
opts=odeset('events',@(t,x) stop_escalera_2(t,x, mu,L));
[t,x]=ode45(f,[0,10],[th_0,0],opts);
hold on
plot(t,x(:,1));
tL=t(end);
disp([tL,x(end,1)*180/pi])
opts=odeset('events',@stop_escalera_1);
f=@(t,x) [x(2);(sin(x(1))-mu*cos(x(1)))*(2*9.8/L-cos(x(1))*x(2)^2)
/(1/3+(sin(x(1))-mu*cos(x(1)))*sin(x(1)))];
[t,x]=ode45(f,[0,10],[x(end,1),x(end,2)],opts);
plot(t+tL,x(:,1))
hold off
set(gca,'YTick',0:pi/12:pi/2)
set(gca,'YTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
xlabel('t')
ylabel('\theta')
title('Escalera, con rozamiento en el suelo')
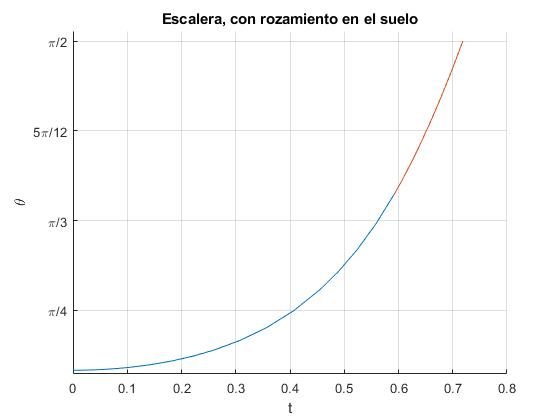
La primera etapa del movimiento se representa en color azul, la segunda, cuando la escalera ya no se apoya en la pared vertical, en rojo. El instante tl, el ángulo θl y el tiempo en llegar al suelo son
0.5925 64.4647 >> tL+t(end) %en el suelo ans = 0.7186
Actividades
Se introduce
- El ángulo θ0 que forma la escalera con la vertical, en el control titulado Ángulo
- El coeficiente de rozamiento μs=μk=μ, en el control titulado Coef. rozamiento.
- Se han fijado la longitud de la escalera en L=1 m y la masa m=1 kg
Se pulsa el botón titulado Nuevo
Si el ángulo θ0 es menor que el ángulo límite tanθs=2μs
-
La escalera permanece en equilibrio
-
En caso contrario, observamos el movimiento de la escalera y las fuerzas sobre la misma.
El programa interactivo nos suministra los datos del tiempo t, el ángulo θ que forma la escalera con la dirección vertical, las reacciones Fx en el apoyo en la pared vertical y N en el apoyo en el suelo
Cuando la escalera empieza a deslizar, nos fijaremos en la reacción Fx en el apoyo con la pared vertical, actuando en el botón paso a paso >| medimos el instante tl y el ángulo θl en el que Fx=0, la escalera deja de estar en contacto con la pared vertical.
Una persona sube por la escalera
Supongamos una escalera de longitud L y masa m apoyada en un suelo rugoso y en una pared lisa (sin rozamiento). Un hombre de masa M asciende una distancia d a lo largo de la escalera
Estática
Las fuerzas sobre la escalera son las que se dibujan en la figura.
- Fx es la reacción de la pared vertical supuesta lisa (sin rozamiento)
- N es la fuerza que ejerce la pared horizontal
- mg es el peso que actúa en el centro de masas de la escalera
- Mg es el peso del hombre.
- Fr es la fuerza de rozamiento que impide que el extremo inferior de la escalera deslice
Cuando la escalera forma un ángulo θ con la vertical las ecuaciones de equilibrio son:
La resultante de la fuerzas debe ser cero.
El momento de las fuerzas respecto de cualquier punto (por ejemplo el extremo inferior de la escalera) es cero.
Conocido el ángulo θ y la distancia d que asciende a lo largo de la escalera, despejamos la fuerza de rozamiento Fr que sujeta el extremo inferior de la escalera.
La escalera desliza si
Fr≥μsN= μs(mg+Mg)
Donde μs es el coeficiente estático de rozamiento
La máxima distancia dm que puede ascender por la escalera, justo en el momento en el que empieza a deslizar, es
Dinámica
La posición del centro de masas del sistema formado por el hombre y la escalera se encuentra a una distancia rc medida desde el extremo inferior de la escalera
Aplicando el teorema de Steiner calculamos el momento de inercia del sistema respecto de un eje que pasa por el centro de masas
La fuerza de rozamiento Fr=μN en el extremo inferior de la escalera disminuye ligeramente, ya que el coeficiente cinético μ suele ser menor que el estático μs
El movimiento de la escalera consta de dos etapas:
El extremo superior de la escalera permanece en contacto con la pared vertical
Movimiento de traslación del c.m.
Movimiento de rotación alrededor de un eje que pasa por el centro de masas
La posición del centro de masas es (x, y). Mientras el extremo superior de la barra está apoyada en la pared vertical Fx>0, hay una relación entre x, y y el ángulo θ.
Derivamos dos veces respecto del tiempo
Despejamos Fx y N en las ecuaciones del movimiento del c.m.
Introducimos N, Fx en la ecuación de la dinámica de rotación. Obtenemos la ecuación diferencial
Cuando M=0, rc=L/2, Ic=mL2/12. Obtenemos la misma ecuación diferencial que describe el movimiento de la escalera apoyada en las dos paredes perpendiculares
Sea una escalera de L=5 m de longitud y m=10 kg de masa, el coeficiente de rozamiento μ=0.3 entre la escalera y el suelo.
Apoyamos la escalera en la pared vertical, formando un ángulo de θ0=25°. Una persona de 60 kg sube por la escalera, ascendiendo d=4 m. Comparamos la fuerza de rozamiento Fr con el valor máximo μ(M+m)g y vemos que la escalera desliza
>> Fr=(m*L/2+M*d)*9.8*tan(th_0)/L Fr = 242.2002 >> (m+M)*9.8*0.3 ans = 205.8000
Resolvemos la ecuación diferencial del movimiento, utilizando la función ode45 de MATLAB, con las siguientes condiciones iniciales: en el instante t=0, dθ/dt=0, θ=θ0=25°, d=4 m. Interrumpimos el proceso de integración cuando la escalera llega al suelo θ=π/2
L=5; %longitud de la escalera
m=10; %masa de la escalera
M=60; %masa de la persona
mu=0.3; %empieza a deslizar con 31º
th_0=25*pi/180; %ángulo inicial
d=4; % cuando ha ascendido hasta d
rc=(M*d+m*L/2)/(m+M); %centro de masas
Ic=m*L^2/12+m*(L/2-rc)^2+M*(rc-d)^2; %momento de inercia
f=@(t,x) [x(2); ((m+M)*L*cos(x(1))*(mu*rc*cos(x(1))+(L-2*rc)*sin(x(1)))*x(2)^2+
(m*L/2+M*d)*9.8*sin(x(1))-mu*(m+M)*L*9.8*cos(x(1)))/
(Ic+(m+M)*(rc^2+(L^2-2*L*rc)*cos(x(1))^2-mu*L*rc*sin(x(1))*cos(x(1))))];
opts=odeset('events',@ stop_escalera_1);
[t,x]=ode45(f,[0,10],[th_0,0],opts);
acel=((m+M)*L*cos(x(:,1)).*(mu*rc*cos(x(:,1))+(L-2*rc)*sin(x(:,1))).*
(x(:,2).^2)+(m*L/2+M*d)*9.8*sin(x(1))-mu*(m+M)*L*9.8*cos(x(1))).
/(Ic+(m+M)*(rc^2+(L^2-2*L*rc)*cos(x(:,1)).^2-mu*L*rc*sin(x(:,1)).*cos(x(:,1))));
Fx=mu*9.8+(((L-rc)*cos(x(:,1))-mu*rc*sin(x(:,1))).*acel-((L-rc)*sin(x(:,1))+
mu*rc*cos(x(:,1))).*(x(:,2).^2));
plot(x(:,1), Fx);
set(gca,'XTick',0:pi/12:pi/2)
set(gca,'XTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
ylabel('F_x')
xlabel('\theta')
title('Escalera, con rozamiento en el suelo')
Observamos que la fuerza horizontal que ejerce la pared vertical Fx va disminuyendo hasta que se hace cero en el instante tl. El ángulo que forma la escalera con la vertical es θl y la velocidad angular de rotación es (dθ/dt)l.
La reacción Fx se hace cero para θl=50° aproximadamente. Para este ángulo la velocidad angular de rotación es (dθ/dt)l. La velocidad horizontal del centro de masas es
El extremo superior de la escalera deja de estar en contacto con la pared vertical
Las ecuaciones del movimiento son
Movimiento de traslación del centro de masas
Movimiento de rotación alrededor de un eje que pasa por el centro de masas
La ordenada y del centro de masas es
Derivamos dos veces respecto del tiempo
Despejamos la reacción N
Introducimos la expresión de N en la ecuación de la dinámica de rotación y en la de traslación del c.m. Obtenemos el sistema de dos ecuaciones diferenciales de segundo orden
Cuando M=0, rc=L/2, Ic=mL2/12. Obtenemos la misma ecuación diferencial que describe el movimiento de la escalera apoyada solamente en el suelo
Movimiento completo
El movimiento de la escalera desde la posición inicial θ0>θs hasta la posición final π/2, se describe mediante ecuaciones diferenciales de segundo orden:
la primera, en el intervalo (θ0, θl)
la segunda, en el intervalo (θl, π/2)
Definimos dos funciones: una función que detenga el primer proceso de integración cuando se alcance el ángulo θl y de comienzo al segundo proceso de integración y otra que detenga la integración para el ángulo π/2
function [value,isterminal,direction]=stop_escalera_4(t,x, mu, L,m,M, rc,Ic,d)
acel=((m+M)*L*cos(x(1))*(mu*rc*cos(x(1))+(L-2*rc)*sin(x(1)))*x(2)^2+
(m*L/2+M*d)*9.8*sin(x(1))-mu*(m+M)*L*9.8*cos(x(1)))/(Ic+(m+M)*
(rc^2+(L^2-2*L*rc)*cos(x(1))^2-mu*L*rc*sin(x(1))*cos(x(1))));
Fx=mu*9.8+(((L-rc)*cos(x(1))-mu*rc*sin(x(1)))*acel-
((L-rc)*sin(x(1))+mu*rc*cos(x(1)))*x(2)^2);
value=Fx;
isterminal=1;
direction=-1;
end
function [value,isterminal,direction]=stop_escalera_1(t,x)
value=x(1)-pi/2;
isterminal=1;
direction=1;
end
Sea una escalera de L=5 m de longitud y m=10 kg de masa, el coeficiente de rozamiento μ=0.3 entre la escalera y el suelo. Apoyamos la escalera en la pared vertical, formando un ángulo de θ0=25°. Una persona de 60 kg sube por la escalera, ascendiendo d=4 m.
L=5; %longitud de la escalera
m=10; %masa de la escalera
M=60; %masa de la persona
mu=0.3; %empieza a deslizar con 31º
th_0=25*pi/180; %ángulo inicial
d=4; % cuando ha ascendido hasta d
rc=(M*d+m*L/2)/(m+M); %centro de masas
Ic=m*L^2/12+m*(L/2-rc)^2+M*(rc-d)^2; %momento de inercia
f=@(t,x) [x(2); ((m+M)*L*cos(x(1))*(mu*rc*cos(x(1))+(L-2*rc)*sin(x(1)))*x(2)^2
+(m*L/2+M*d)*9.8*sin(x(1))-mu*(m+M)*L*9.8*cos(x(1)))/
(Ic+(m+M)*(rc^2+(L^2-2*L*rc)*cos(x(1))^2-mu*L*rc*sin(x(1))*cos(x(1))))];
opts=odeset('events',@(t,x) stop_escalera_4(t,x, mu, L,m,M, rc,Ic,d));
[t,x]=ode45(f,[0,10],[th_0,0],opts);
hold on
plot(t,x(:,1));
tL=t(end);
disp([tL,x(end,1)*180/pi])
opts=odeset('events',@stop_escalera_1);
f=@(t,x) [x(2); ((m*L/2+M*d)*9.8*sin(x(1))-mu*(m+M)*9.8*rc*cos(x(1))-
(m+M)*rc^2*(sin(x(1))-mu*cos(x(1)))*cos(x(1))*x(2)^2)
/(Ic+(m+M)*rc^2*(sin(x(1))-mu*cos(x(1)))*sin(x(1)))];
[t,x]=ode45(f,[0,10],[x(end,1),x(end,2)],opts);
plot(t+tL,x(:,1))
hold off
set(gca,'YTick',0:pi/12:pi/2)
set(gca,'YTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
xlabel('t')
ylabel('\theta')
title('Escalera, con rozamiento')
La primera etapa del movimiento se representa en color azul, la segunda, cuando la escalera ya se apoya solamente en el suelo, en rojo. El instante tl y el ángulo θl, y el tiempo total en alcanzar el suelo son
0.7484 49.7862 >> t(end)+tL ans = 1.1733
Actividades
Se introduce
- El ángulo θ que forma la escalera con la vertical, en el control titulado Ángulo
- El coeficiente estático y cinético de rozamiento μs=μk=μ, en el control titulado Coef. rozamiento.
- La masa del hombre M en kg, en el control titulado Masa
- La distacia que asciende d a lo largo de la escalera, en el control titulado Asciende
- Se han fijado la longitud de la escalera en L=5 m y la masa m=10 kg
Se pulsa el botón titulado Nuevo
El sistema formado por la escalera y una masa puntual permanece en equilibrio o se mueve
El programa interactivo nos suministra los datos del tiempo t, el ángulo θ que forma la escalera con la dirección vertical, las reacciones Fx en el apoyo en la pared vertical y N en el apoyo en el suelo
Cuando la escalera empieza a deslizar, nos fijaremos en la reacción Fx en el apoyo con la pared vertical, actuando en el botón paso a paso >| medimos el instante tl y el ángulo θl en el que Fx=0, la escalera deja de estar en contacto con la pared vertical.