I se denomina tensor de inercia y es una matriz simétrica
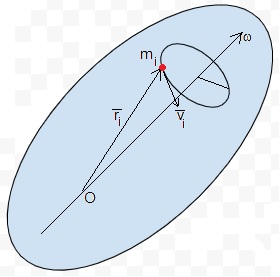
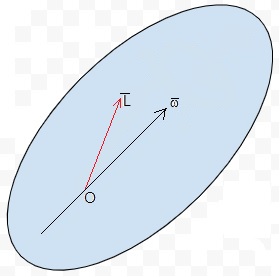
En general, el vector momento angular , no es paralelo al vector velocidad angular,
Para una distribución continua de masa
ρ(x,y,z) es la densidad que podría depnder de las coordendas del punto considerado del sólido. Estudiaremos sólidos homogéneos en los que la densidad ρ es constante.
Los elementos del tensor de inercia dependen del origen O y de la orientación de los ejes coordenados. Es posible enocontar unos ejes, denominados principales de inercia para los cuales solamente los elementos diagonales del tensor son no nulos
La energía cinética y el momento angular serían
El momento angular y la velocidad angular tendrán la misma dirección a lo largo de un eje principal de inercia
Tensor de inercia
Calculamos el tensor de inercia de una placa y de un cono macizo (versión simple de una peonza)
Placa homogénea cuadrada
Sea una placa cuadrada homogénea de densidad σ kg/m2, de lado a situada en el plano XY
Los elementos del tensor de inercia son
El tensor de inercia es
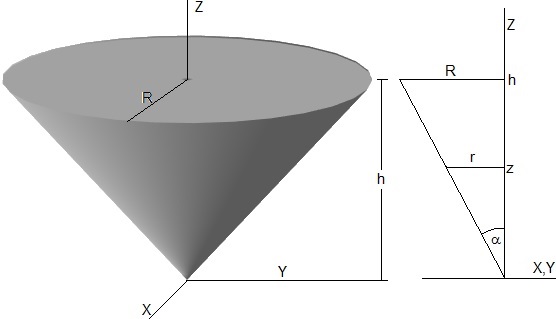
Cono macizo homogéneo
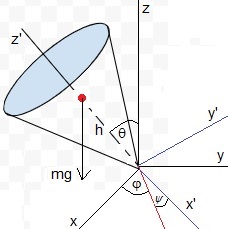
Sea un cono macizo, homogéneo de densidad ρ kg/m3. de altura h y radio de l abase R. El ángulo del vértice es 2α, con tanα=R/h
Para dibujar el cono, se ha empleado el código
theta=pi/3; %angulo del cono
r=linspace(0,1,30);
phi=linspace(0,2*pi,30);
[r,phi]=meshgrid(r,phi);
x=r.*cos(phi)*sin(theta);
y=r.*sin(phi)*sin(theta);
z=r*cos(theta);
hold on
surfl(x,y,z) %cono
surfl(x,y,cos(theta)*ones(length(r))) %tapa
shading interp
colormap(gray);
hold off
axis off
view(20,30)
El elemento de volumen en coordenadas cilíndricas es dV=(r·dφ)·dr·dz, tal como se muestra en a figura. Tenemos que calcular las integrales
El cono es un sólido de revolución, por simetría, Ixx=Iyy
Teniendo en cuenta el resultado de la integral, llegamos a
Calculamos Izz
Calculamos los elementos fuera de la diagonal principal, Ixy
Del mismo modo Ixz=Iyz=0
El tensor de inercia es
Angulos de Euler
Utilizamos el concepto de componente de un vector
El sistema de referencia inercial fijo en el espacio es x, y z
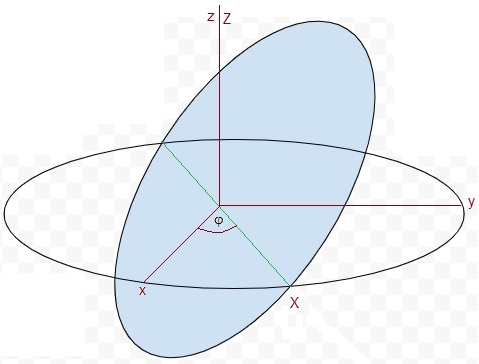
Primera rotación alrededor del eje z un ángulo φ
El sistema de referencia rotado un ángulo φ es X, Y, Z=z
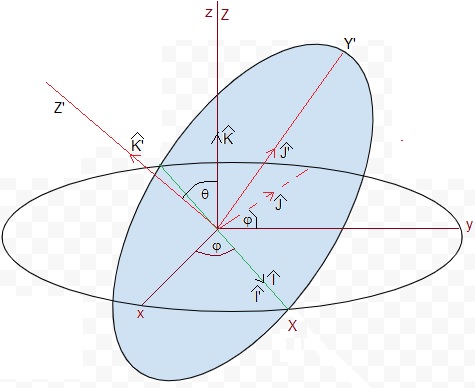
Segunda rotación alrededor del nuevo eje X un ángulo θ
El sistema de referencia rotado un ángulo θ es X'=X, Y', Z'
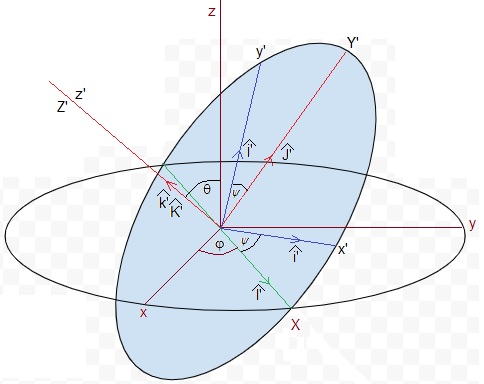
Tercera rotación alrededor del nuevo eje Z' un ángulo ψ
El sistema de referencia rotado un ángulo ψ es x', y', z'=Z'
Relacionamos el sistema de referencia inercial (x,y,z) y el sistema de referencia (x',y',z') ligado al sólido rígido
El resultado es
En forma matricial
Velocidad angular
La dirección de la velocidad angular es la del eje de rotación, sentido, la regla del sacacorchos
El eje Z=z, es el primer eje de rotación con velocidad angular dφ/dt
El eje X, es el segundo eje de rotación con velocidad angular dθ/dt
El eje z'=Z', es el tercer eje de rotación con velocidad angular dψ/dt
El resultado es
La energía cinética se rotación de la peonza simétrica de momentos de inercia, I1=I2 e I3
Ecuaciones del movimiento
La energía potencial de la peonza respecto del punto de apoyo es mghcosθ. Siendo h la distancia entre el centro de masas y el punto de apoyo
La lagrangiana depende de tres coordenadas φ, θ y ψ, tenemos tres ecuaciones del movimiento
La primera ecuación φ, describe el movimiento de precesión y la tercera ecuación en θ, el movimiento de nutación
Constantes del movimiento
La lagrangiana no depende del ángulo φ, se conserva la cantidad Pφ
La lagrangiana no depende del ángulo ψ, se conserva la cantidad Pψ
Tenemos un sistema de dos ecuaciones, despejamos dφ/dt y dψ/dt
Si pφ<pψ, la velocidad angular dφ/dt se anula para el ángulo cosθφ=pφ/pψ. Si θ<θφ, entonces dφ/dt<0, en caso contrario, dφ/dt>0
La energía es constante
El segundo término es una constante del movimiento
El resultado es
La energía E se puede escribir en términos de las otras dos constantes del movimiento, pφ y pψ
La energía E' es también constante
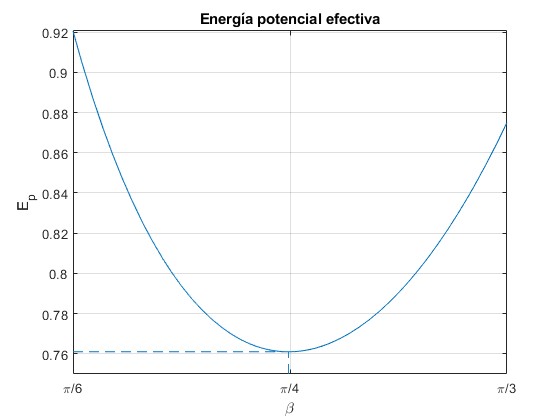
Definimos una energía potencial efectiva
La energía E' tiene que ser mayor que el mínimo de la energía potencial efectiva. El mínimo se calcula derivado la energía potencial respecto de θ e igualando a cero
Cuando la energía E' es igual al mínimo de la energía potencial efectiva, el ángulo de inclinación del eje de la peonza es constante θ=θ0
Representamos la energía potencial efectiva Ep(θ) con los siguientes datos
Constante, pφ=2
Constante, pψ=2.5
Masa de la peonza, m=1
Momento de inercia, I1=1
Distancia entre el c.m. y el punto de apoyo, h=1
Aceleración de la gravedad, g=1
El programa calcula, mediante la función fzero de MATLAB, el ángulo θ0≈π/4, para el cual la energía potencial es mínima ≈0.76.
pg=2.5; %constantes del movimiento
pa=2;
m=1; %masa
g=1; %aceleración de la gravedad
I1=1; %momento de inercia
h=1; %distancia del c.m. al punto de apoyo
Ep=@(x) ((pa-pg*cos(x)).^2)./(2*I1*sin(x).^2)+m*g*h*cos(x);
f=@(x) (pa-pg*cos(x))*(pg-pa*cos(x))-I1*m*g*h*sin(x)^4;
min=fzero(f,[pi/6,pi/3]);
fplot(Ep,[pi/6,pi/3])
Em=Ep(min);
line([min,min],[0.75,Em],'lineStyle','--')
line([pi/6,min],[Em,Em],'lineStyle','--')
set(gca,'XTick',pi/6:pi/12:pi/3)
set(gca,'XTickLabel',{'\pi/6','\pi/4','\pi/3'})
grid on
xlabel('\beta')
ylabel('E_p')
title('Energía potencial efectiva')
Despejamos dθ/dt en la ecuación de la energía E
Llamamos u=cosθ y definimos los parámetros A, B, a y b
Integramos
que es una integral elíptica
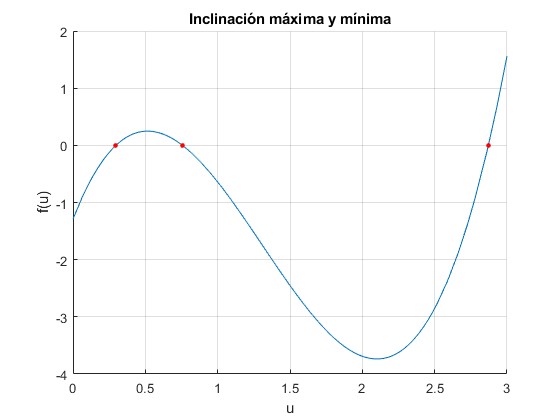
Bajo la raíz tenemos un polinomio de tercer grado de coeficientes
El valor absoluto de u, |u|≤1. De las tres raíces, dos cumplirán
El ángulo del eje de la peonza con la vertical θ estará limitado a θ1=arccos(u1) y θ2=arccos(u2)
A=1.6;
B=2.0;
a=2.5;
b=1.7;
raices=roots([1,-(A+a^2)/B,(2*a*b-B)/B, (A-b^2)/B]);
f=@(u) (A-B*u).*(1-u.^2)-(b-a*u).^2;
hold on
fplot(f,[0,3])
for k=1:length(raices)
plot(raices(k),0,'ro','markersize',3,'markerfacecolor','r')
end
hold off
grid on
xlabel('u')
ylabel('f(u)')
title('Inclinación máxima y mínima')
Los ángulos límite en el movimiento de precesión son: θ1=40.8° y θ2=72.7°
>> raices
raices =
2.8714
0.7568
0.2968
>> acosd(raices(2))
ans = 40.8148
>> acosd(raices(3))
ans = 72.7340
>> acosd(b/a)
ans = 47.1564
El ángulo θφ=47.1° para el cual dφ/dt=0, está comprendido entre θ1 y θ2 (tercer caso)
Ecuación del movimiento en θ
Nos falta la ecuación del movimiento en θ
Introducimos las constantes del movimiento
Solución numérica de las ecuaciones del movimiento
Resolveremos mediante el procedimiento ode45 de MATLAB el sistema de tres ecuaciones diferenciales.
con la condiciones iniciales
Representaremos la trayectoria del extremo de la peonza z'=1; sobre una esfera de radio unidad. Para ello, es necesario hacer la transformación
Comprobaremos que la energía E se mentiene constante o bien, la cantidad e
Ejemplos
Ejemplo 1
Parámetros
A=1.6
B=2
a=2.5
b=1.7
I1=2
I3=1
Como hemos calculado anteriormente, las inclinaciones máxima y mínima del eje son θ1=40.8° y θ2=72.7°. El ángulo θφ=47.1° para el cual dφ/dt=0
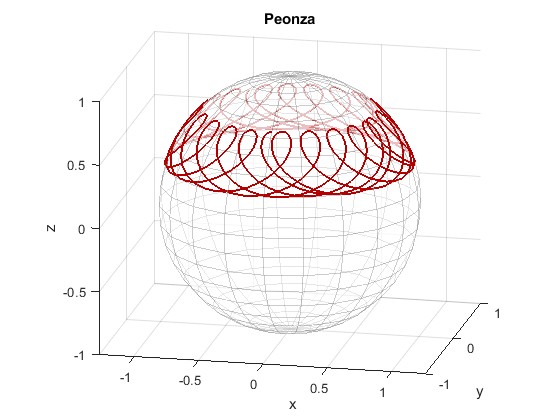
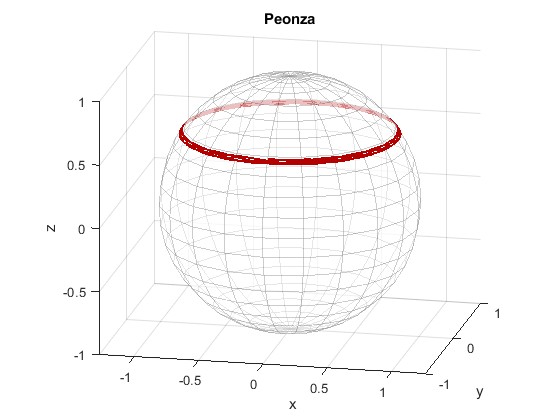
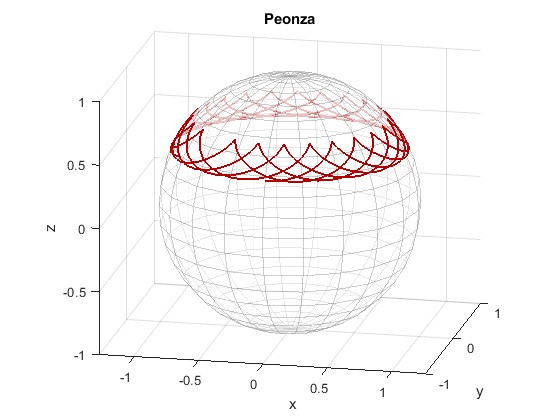
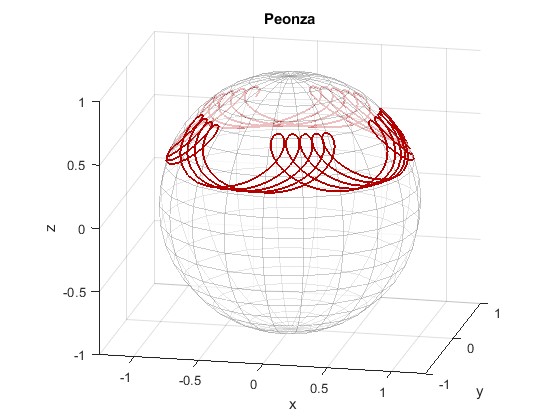
Representamos la trayectoria del extremo del eje de la peonza para varios ángulos iniciales θ0
Angulo inicial, θ0=42°
B=2.0;
a=2.5;
b=1.7;
I1=2;
I3=1;
hold on
[X,Y,Z] = sphere;
h1=mesh(X,Y,Z);
set(h1,'EdgeColor',[0.6,0.6,0.6],'EdgeAlpha',0.5,'FaceAlpha',0.5)
% x(1) es beta, x(2) dbeta/dt, x(3) es alfa, x(4) gamma
fg=@(t,x)[x(2); (b^2+a^2)*cos(x(1))/sin(x(1))^3-a*b*(3+cos(2*x(1)))
/(2*sin(x(1))^3)+B*sin(x(1))/2; (b-a*cos(x(1)))/sin(x(1))^2; a*I1/I3
-(b-a*cos(x(1)))+cos(x(1))/sin(x(1))^2];
[~,x]=ode45(fg,[0,70],[42*pi/180, 0,0,0]); %modificar el ángulo inicial
%trayectoria
h1=line(sin(x(:,3)).*sin(x(:,1)),-cos(x(:,3)).*sin(x(:,1)),cos(x(:,1)));
set(h1,'Color',[.7,0,0],'LineWidth',1.5)
hold off
axis equal
grid on
xlabel('x')
ylabel('y')
zlabel('z')
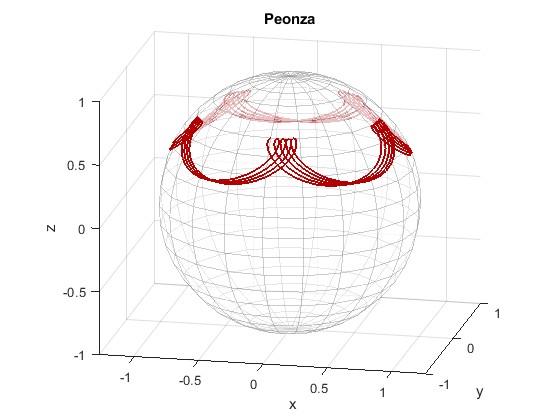
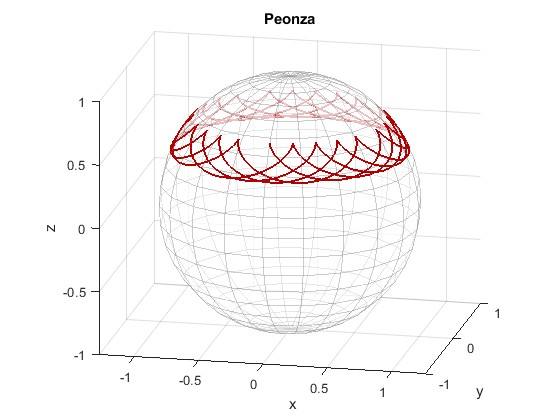
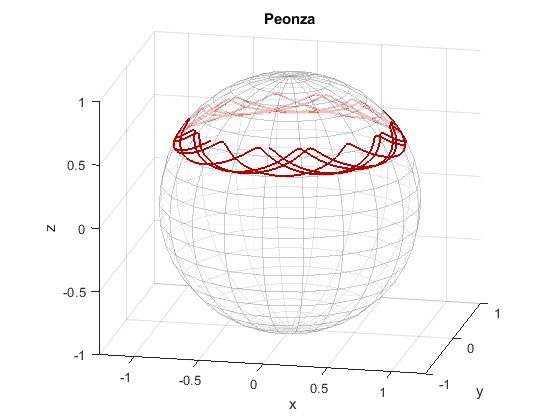
title('Peonza')
view(12,16)
%energía
e=x(:,2).^2+((b-a*cos(x(:,1)))./sin(x(:,1))).^2+B*cos(x(:,1));
Comprobamos que la energía se mentiene constante
>> e(1:10)
ans =
1.4926
...
1.4926
>> e(200:220)
ans =
1.4987
1.4986
...
1.5000
...
1.4999
Angulo inicial, θ0=45°
Angulo inicial, θ0=47.16°
Angulo inicial, θ0=50°
Angulo inicial, θ0=55°
Angulo inicial, θ0=65°
Angulo inicial, θ0=70°
Ejemplo 2
Parámetros
A=1.6
B=2
a=2.5
b=2
I1=2
I3=1
Las inclinaciones máxima y mínima del eje son θ1=36.9° y θ2=53.7°. El ángulo θφ=36.9° para el cual dφ/dt=0
Ejemplo 3
Parámetros
A=2.8
B=2
a=1.75
b=2
I1=2
I3=1
Las inclinaciones máxima y mínima del eje son θ1=24.0° y θ2=65.9°. No hay ángulo θφ para el cual dφ/dt=0
Otros ejemplos, en el ártículo citado en segundo lugar, en las referencias
Referencias
Walter Greiner. Classical Mechanics, Systems of Particles and Hamiltonian Dynamics. Second Edition. Springer 2010 pp. 185-200, 238-241