

Movimiento de una rueda dentada a lo largo de un un plano inclinado
La rueda dentada
Dibujamos una rueda dentada de N=6 y 12 dientes, de radio R=1 y de radio interior r.
N=12;
R=1; %radio
r=0.575; %radio interior
x=zeros(1,2*N)
y=zeros(1,2*N)
for i=1:2:2*N
x(i)=R*cos((i-1)*pi/N);
y(i)=R*sin((i-1)*pi/N);
x(i+1)=r*cos((i-1)*pi/N+pi/N);
y(i+1)=r*sin((i-1)*pi/N+pi/N);
end
x=[x,R];
y=[y,0];
hold on
fill(x,y,'c')
plot(0,0,'o','markersize',3,'markeredgecolor','k','markerfacecolor','k')
plot(x,y,'k')
hold off
axis equal
axis off
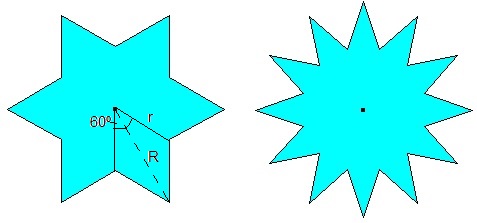
En el caso de una típica estrella de seis puntas, hay una relación sencilla entre r y R, rcos30=R/2,
Momento de inercia de la rueda dentada respecto de un eje que pasa por el c.m.
Supondremos una rueda dentada de forma cilíndica de longitud L y masa M
Consideremos la porción de rueda cuya sección se muestra en la figura. Calculamos el momento de inercia respecto a un eje perpendicular al plano de la figura que pasa por O y la multiplicamos por el número de dientes, N.
La densidad ρ del material es el cociente entre la masa M de la rueda y su volumen, N veces el volumen de la porción cuya sección se muestra en la figura.
El área del triángulo superior es r·sin(π/N)cos(π/N), el área del triángulo inferior es r·sin(π/N)(R-rcos(π/N)), el área total es rR·sin(π/N). El volumen de la porción de rueda L·Rr·sin(π/N), y el volumen de la rueda N·LRr·sin(π/N), la densidad
El momento de inercia respecto a un eje perpendicular al plano de la figura que pasa por O, de la porción triangular superior es
El momento de inercia de la porción triangular inferior respecto al mismo eje que pasa por O, se calcula de forma similar. El ángulo θ vale
El momento de inercia es
El momento de inercia total respecto del eje perpendicular al plano de la figura que pasa por O, es
El momento de inercia respecto de un eje paralelo que pasa por el vértice P se obtiene aplicando el teorema de Steiner
Cuando N→∞, r→R entonces Icm→MR2/2, que es momento de inercia de un cilindro de masa M y radio R respecto de su eje
Conservación de la energía
Vamos a estudiar el movimiento de la rueda dentada de masa M, radio R, situado sobre un plano inclinado α. La rueda gira alrededor de un eje perpendicular al plano de la figura que pasa por el vértice P. El c.m. del lápiz (punto de color rojo) describe un arco de circunferencia de radio R y ángulo 2π/N. En la parte superior de la figura, se muestra la situación inicial, la velocidad angular inicial es ω0
La energía de la rueda dentada en la posición inicial es la suma de la energía cinética de rotación alrededor del eje que pasa por el vértice P y la energía potencial del centro de masa, que está a una altura Rcos(π/N-α) sobre P, tal como vemos en la figura.
En la parte inferior de la figura, se muestra la rueda en la situación final, cuando ha completado un giro de 2π/N alrededor del eje que pasa por el vértice P. La velocidad angular de rotación es ωf y el centro de la rueda está a una altura Rcos(π/N+α) sobre P. Después del choque del vértice P' con el plano inclinado, el nuevo eje de rotación pasa por dicho vértice P' distante 2Rsin(π/N) de P
Conocida la velocidad angular inicial ω0, calculamos la velocidad angular final ωf, aplicando el principio de conservación de la energía
Para obtener este resultado utilizamos la relación trigonométrica, cos(A-B)-cos(A+B)=2sinA·sinB. Con A=π/N y B=α.
Choque de un vértice con el plano inclinado
En la página titulada Una caja que puede volcar, una caja que desliza sin rozamiento a lo largo de un plano horizontal, choca con un obstáculo puntual. Se aplica el principio de conservación del momento angular, para calcular la velocidad angular de rotación de la caja después del choque. Aquí aplicamos el mismo principio.
La rueda gira alrededor del eje perpendicular al plano de la figura que pasa por P, hasta que el vértice siguiente, entra en contacto con el plano inclinado en P', en ese momento, la velocidad del c.m. vi=ωf y es perpendicular al radio vector PO. Inmediatamente después del choque, el eje de rotación pasa de P a P' y la velocidad después del choque es vf perpendicular al radio vector P'O.
El momento angular respecto de O de un sólido rígido de masa M cuyo c.m. se traslada con velocidad , y gira alrededor de un eje que pasa por el c.m. con velocidad angular , es
El momento angular inicial respecto del eje que pasa por P' es
siendo ωf la velocidad angular de rotación final justo antes del choque. Se ha utilizado la relación trigonométrica cos(2A)=cos2A-sin2A
El momento angular final es de un sólido que gira alrededor del eje que pasa por P' con velocidad angular ω0, la inicial para la siguiente etapa del movimiento
Aplicamos la conservación del momento angular, y despejamos la velocidad angular final ω0
Etapas del movimiento de la rueda dentada
El movimiento de la rueda dentada consta por tanto, de dos etapas:
Movimiento de rotación de 2pi/N alrededor de un eje fijo que pasa por el vértice situado en P
Choque del vértice con el plano inclinado
Etapas del movimiento:
Etapa inicial
Primera etapa
Segunda etapa
- Número de dientes, N=12
- Radio de la rueda, R=1 cm
- Radio interior, r=0.575 cm
- La masa M no afecta al movimiento de la rueda
- El ángulo del plano inclinado, α=1.39°
Conocida la velocidad angular inicial ω0, calculamos la velocidad angular final ωf, aplicando el principio de conservación de la energía
La velocidad angular inicial ω0 para la siguiente rotación alrededor de un eje que pasa por P', se calcula mediante la conservación del momento angular
Establecemos como situación inicial aquella en el que la rueda dentada se ha girado θ=π/N, tal como se muestra en la figura y se suelta, la velocidad angular inicial es cero. La rueda empieza su movimiento a lo largo del plano inclinado. Su velocidad angular final justo antes de que el siguiente vértice entre en contacto con el plano inclinado, es
La velocidad al comienzo de la primera etapa es, ω0=k·ωf
La velocidad final al terminar la primera etapa es ωf que se calcula aplicando el principio de conservación de la energía
La velocidad al comienzo de la segunda etapa es, ω0=k·ωf
y así, sucesivamente...
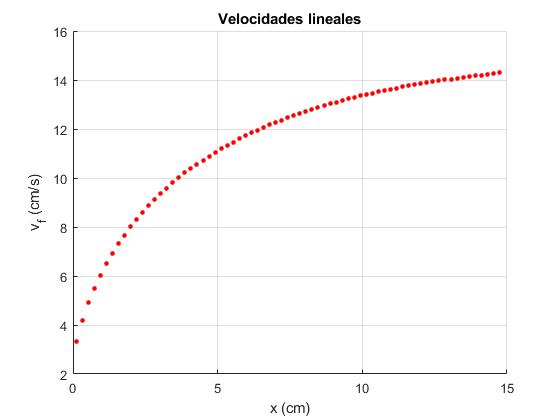
Calculamos las velocidades del centro de la rueda justo antes de que el vértice de la rueda entre en contacto el plano inclinado en función de la posición del vértice en dicho plano
N=12; %número de dientes
R=1/100; %radio,
r=0.575/100; %radio interior,
M=1; % masa no afecta
alfa=1.39*pi/180; %plano inclinado
I_cm=M*((r*cos(pi/N))^3/2+2*(R^4/12-R*(r*cos(pi/N))^3/3+
(r*cos(pi/N))^4/4)/(R-r*cos(pi/N)))/R;
I=I_cm+M*R^2; %momento de inercia respecto de un eje que pasa por el vértice
k=1-2*sin(pi/N)^2/(1+I_cm/(M*R^2));
wf=sqrt(M*9.8*R*(cos(alfa)-cos(pi/N+alfa))*2/I); %etapa inicial
hold on
plot(R*sin(pi/N)*100,wf*R*100,'o','markersize',3,'markeredgecolor',
'r','markerfacecolor','r')
for i=1:30
w0=k*wf;
wf=sqrt((I*w0^2/2+2*M*9.8*R*sin(pi/N)*sin(alfa))*2/I);
h=(2*i+1)*R*sin(pi/N)*100;
plot(h,wf*R*100,'o','markersize',3,'markeredgecolor','r',
'markerfacecolor','r')
end
grid on
xlabel('x (cm)')
ylabel('v_f (cm/s)')
title('Velocidades lineales')
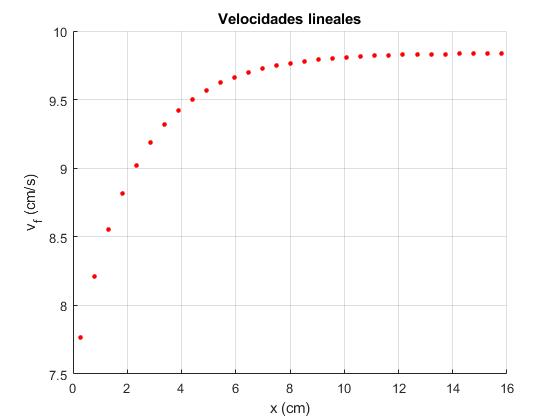
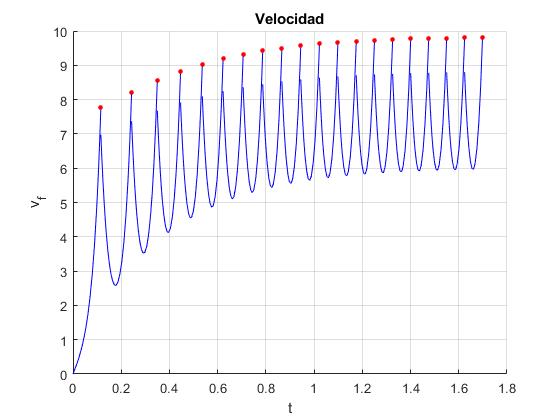
La velocidad parece tender hacia un valor límite constante
Si incrementamos el número de dientes N, la velocidad tiende a crecer linealmente con el tiempo, como un cilindro que rueda sin deslizar a lo largo de un plano inclinado
N=30; %número de dientes R=1/100; %radio, r=0.845/100; %radio interior, ...
Tiempo entre dos choques
La rueda dentada que parte con velocidad ω0, cuando ha girado un ángulo θ ha empleado un tiempo t, su velocidad angular es dθ/dt. Aplicamos el principio de conservación de la energía
Donde E0 es la energía en el punto de partida
Normalmente, parte de la posición angular θ=0, con velocidad angular ω0
En la situación inicial, el punto de partida es θ=π/N en reposo
y los límites de integración son, π/N y 2π/N
La rueda parte de la posición inicial en el origen, su energía E0 es la potencial. Gira alrededor de un eje que pasa por el vértice inferior durante un tiempo t0 que calculamos numéricamente resolviendo la integral definida entre los limites π/N y 2π/N. En el instante t0 el siguiente vértice entra en contacto con el plano inclinado, el segundo eje de giro se encuentra en la posición Rsin(π/N).
Se calcula la velocidad ωf justamente antes del choque, aplicando el principio de conservación de la energía, la velocidad inicial ω0, justamente después del choque y su energía E0 que se conserva durante la primera etapa del movimiento, hasta el próximo choque del siguiente vértice con el plano inclinado. Se calcula el tiempo t1 que el segundo vértice está en contacto con el plano inclinado en la posición Rsin(π/N), resolviendo la integral definida entre los límites 0 y 2π/N.
La segunda etapa del movimiento comienza en el instante t0+t1 con el eje en la posición Rsin(π/N)+2Rsin(π/N). El movimiento se repite
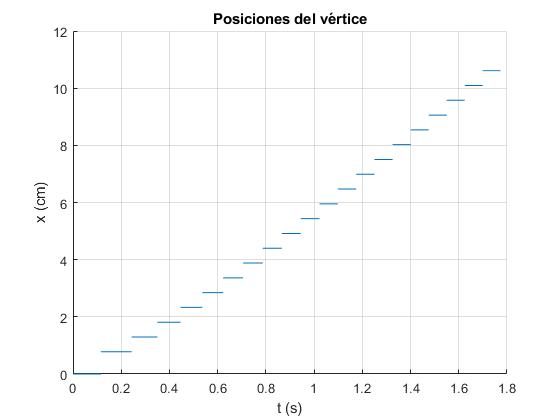
Elaboramos un script, para representar la posición del eje de giro en función del tiempo
N=12;%número de dientes
R=1/100; %radio, cm
r=0.575/100; %radio interior, cm
M=1; % masa no afecta
alfa=1.39*pi/180; %plano inclinado
I_cm=M*((r*cos(pi/N))^3/2+2*(R^4/12-R*(r*cos(pi/N))^3/3+
(r*cos(pi/N))^4/4)/(R-r*cos(pi/N)))/R;
I=I_cm+M*R^2; %momento de inercia respecto de un eje que pasa por el vértice
k=1-2*sin(pi/N)^2/(1+I_cm/(M*R^2));
E0=M*9.8*R*cos(alfa); %situación inicial
f=@(x) 1./sqrt(1-M*9.8*R*cos(x-pi/N+alfa)/E0);
t=sqrt(I/(2*E0))*integral(f,pi/N, 2*pi/N);
wf=sqrt(M*9.8*R*(cos(alfa)-cos(pi/N+alfa))*2/I);
hold on
line([0,t],[0,0])
for i=1:20
w0=k*wf;
E0=I*w0^2/2+M*9.8*R*cos(pi/N-alfa);
f=@(x) 1./sqrt(1-M*9.8*R*cos(x-pi/N+alfa)/E0);
t1=sqrt(I/(2*E0))*integral(f,0, 2*pi/N);
wf=sqrt((I*w0^2/2+2*M*9.8*R*sin(pi/N)*sin(alfa))*2/I);
h=(2*i+1)*R*sin(pi/N)*100;
line([t,t+t1],[h,h])
t=t+t1;
end
grid on
xlabel('t (s)')
ylabel('x (cm)')
title('Posiciones del vértice')
Ecuación del movimiento
Las fuerzas que actúan sobre la rueda son:
- El peso, mg
- la reacción N del plano inclinado, perpendicular al plano en el punto de contacto
La ecuación de la dinámica de rotación alrededor del eje que pasa por el vértice
Se resuelve la ecuación diferencial por procedimientos numéricos con las siguientes condiciones iniciales:
- Situación inicial, parte de θ=π/N con velocidad angular (dθ/dt)0=0.
- La condición inicial para la primera etapa del movimiento es, θ=0, (dθ/dt)0=ω0
Llega a la posición θ=2π/N con velocidad angular ωf
Se produce el choque del vértice con el plano inclinado y se reduce la velocidad angular ω0=k·ωf,
y asi, sucesivamente
Elaboramos un script para respresentar la velocidad del centro de la rueda en función del tiempo, se señalan mediante puntos de color rojo, las velocidades finales ωf, justamente antes de producirse el choque de un vértice con el plano inclinado
N=12;%número de dientes
R=1/100; %radio, cm
r=0.575/100; %radio interior, cm
M=1; % masa no afecta
alfa=1.39*pi/180; %plano inclinado
I_cm=M*((r*cos(pi/N))^3/2+2*(R^4/12-R*(r*cos(pi/N))^3/3
+(r*cos(pi/N))^4/4)/(R-r*cos(pi/N)))/R;
I=I_cm+M*R^2; %momento de inercia respecto de un eje que pasa por el vértice
k=1-2*sin(pi/N)^2/(1+I_cm/(M*R^2));
v=zeros(1,20);
tf=zeros(1,20);
f=@(t,x) [x(2);M*9.8*R*sin(x(1)+alfa-pi/N)/I];
opts=odeset('events',@(t,x) estrella_ode45(t,x,N));
tt=0;
hold on
x0=[pi/N,0]; %condiciones iniciales, etapa inicial
for i=1:20
[t,x,te,xe,ie]=ode45(f,[0,10],x0, opts);
plot(tt+t,x(:,2)*R*100,'b') %velocidad angular
tf(i)=t(end)+tt;
tt=tt+te;
v(i)=xe(2); %antes del choque
x0=[0, k*xe(2)]; %condiciones iniciales,
end
plot(tf,v*R*100, 'ro','markersize',3,'markeredgecolor','r','markerfacecolor','r')
grid on
xlabel('t')
ylabel('v_f')
title('Velocidad')
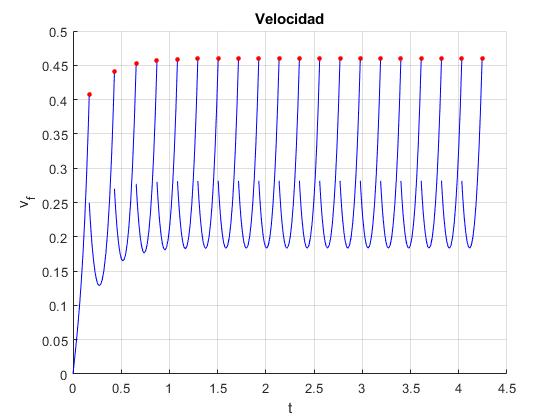
Cambiamos los datos para repetir con MATLAB, los cálculos realizados con el programa interactivo, más abajo
- El ángulo α del plano inclinado, α=10°
- El número de dientes, N=6
- El radio interior de la rueda dentada,
N=6; %número de dientes R=0.05; %radio, cm r=R/sqrt(3); %radio interior, cm M=1; % masa no afecta alfa=10*pi/180; %plano inclinado ....
Actividades
Se introduce
- El ángulo α del plano inclinado, en el control titulado Angulo α
- El número de dientes se ha fijado en N=6
- El radio de la rueda dentada se ha fijado en R=5 cm
- El radio interior de la rueda dentada se ha fijado
- La masa del lápiz se ha fijado en M=1
Se pulsa el botón titulado Nuevo
Se observa el movimiento de la rueda dentada y la representación de la velocidad final de rotación ωf, justamente antes del choque de un vértice con el plano inclinado. En el eje horizontal tenemos la posición del eje de rotación P.
Referencias
Lawrence R. Mead, Frank W. Bentrem. Almost rolling motion: An investigation of rolling grooved cylinders. Am. J. Phys. 66 (3) March 1998, pp. 202-208