

Escalera apoyada en una pared móvil
En la página titulada, Escalera apoyada en dos paredes perpendiculares, se estudia el movimiento de una escalera cuyos extremos se apoyan en dos superficies lisas. El movimiento de la escalera desde la posición inicial hasta que impacta con el plano horizontal, se divide en dos etapas
- Mientras el extremo superior de la escalera está apoyado en la pared
- El extremo superior de la escalera deja de estar en contacto con la pared.
El ángulo crítico, que forma la escalera con la vertical, es
Donde θ0 es el ángulo inicial de partida en reposo
Consideremos una pared móvil de masa M situada en el origen y una escalera de masa m y longitud 2l apoyada en en suelo y en la pared tal como se muestra en la figura, cuando el ángulo que forma la escalera con la vertical es θ0. Supondremos que las superficies sobre las que deslizan los extremos de la escalera son lisas (sin rozamiento). Se suelta la escalera, sus extremos empiezan a deslizar hasta que llega al suelo. Vamos a estudiar el movimiento de los dos cuerpos que forman este sistema aislado.
La escalera está apoyada en la pared móvil
En el instante t, la posición de la pared es x, la posición del centro de masas de la escalera es
Donde θ es el ángulo que forma la escalera con la vertical
La energía cinética de la pared es
La energía cinética de la escalera es la suma de la energía cinética de traslación del c.m. (centro de masas) y de la energía cinética de rotación alrededor de un eje perpendicular que pasa por el c.m.
El momento de inercia de la escalera de masa m y longitud 2l respecto de un eje perpendicular que pasa por el c. m. es m(2l)2/12=ml2/3
La pared se mueve en el plano horizontal, su energía potencial no cambia. La energía potencial del c.m. de la escalera es Ep=mglcosθ.
La lagrangiana L=Ek1+Ek2-Ep es
La lagrangiana no depende de x, por lo que hay una constante del movimiento que denominamos P
Integramos, para obtener la posición de la pared móvil x en función del tiempo t y de la posición angular θ
Como es un sistema aislado, la energía se mantiene constante
Expresamos la lagrangiana en términos del ángulo θ, del mismo modo que la energía
La ecuación del movimiento es
Se resuelve esta ecuación diferencial por procedimientos numéricos con las siguientes condiciones iniciales: en el instante t=0, la escalera está inclinada un ángulo θ0 y se suelta, (dθ/dt)0=0. La pared móvil está situada en el origen en reposo, x=0, dx/dt=0.
Estas condiciones iniciales hacen que la constante P=0 y la energía inicial E=mglcosθ0
Fuerza de interacción
La escalera ejerce una fuerza Fx sobre la pared móvil que hace que se mueva hacia la izquierda
Situación límite
La escalera va cayendo, deslizando su extemo superior por la pared móvil hasta que dejan de estar en contacto, en ese momento tl, la fuerza Fx=0, la aceleración de la pared es nula. A partir de ese instante, la pared móvil y el c.m. de la escalera se mueven con velocidad constante
Sustituyendo en la ecuación del movimiento, obtenemos la velocidad angular en el instante tl
Sustituyendo en la expresión de la energía, obtendremos el ángulo límite θl que forma la escalera con la vertical en el instante tl
Las condiciones iniciales especificadas hacen que la constante P=0 y la energía inicial E=mglcosθ0. Igualamos la energía inicial y la energía en el instante límite tl
Obtenemos una ecuación cúbica en cosθ. La raíz real buscada cosθl estará comprendida entre 0 y 1
En el instante límite tl, la posición xl y velocidad vl de la pared móvil serán
Las condiciones iniciales especificadas hacen que la constante P=0
En la situación incial, la pared móvil de masa M se encuentra en la posición x=0 y el centro de masas de la escalera de masa m en lsinθ0. En el instante tl, la pared móvil se encuentra en xl y el centro de masa de la escalera en lsinθl+xl. En un sistema aislado, si el centro de masas del conjunto de los dos cuerpos estaba inicialmente en resposo, sigue en reposo en la misma posición
Como el centro de masas del conjunto de los dos cuerpos está en reposo, se cumple que M·vl+m·vcm=0
Siendo vcm la velocidad horizontal del centro de masas de la escalera
Primera etapa del movimiento
- Masa de la escalera, m=1
- Longitud de la escalera, 2l=1
- Masa de la pared móvil, M=2
- Posición inicial de la pared móvil, x=0
- Velocidad inicial de la pared móvil, dx/dt=0
- Angulo inicial de la escalera con la vertical, θ0=π/6. La escalera se suelta en esta posición, (dθ/dt)0=0
Con estas condiciones iniciales la constante P=0
Calculamos el ángulo límite θl, cuando la escalera deja de estar en contacto con la pared móvil. Calculamos las raíces de la ecuación cúbica y elegimos la raíz real entre 0 y 1. Utilizamos la función
Resolvemos la ecuación diferencial en θ, mediante
function escalera_bloque
L=0.5; %longitud de la escalera, 2L
M=2; %masa de la pared móvil
m=1; %masa de la escalera
th_0=pi/6; %ángulo inicial
%ángulo límite final
raiz=raices_3([3*m/(8*(m+M)),0,-3/2,cos(th_0)]);
for i=1:length(raiz)
if raiz(i)>0 && raiz(i)<1
th_L=acos(raiz(i));
break;
end
end
f=@(t,x) [x(2); (9.8/L-m*cos(x(1))*x(2)^2/(m+M))*sin(x(1))/
(4/3-m*cos(x(1))^2/(m+M))];
opts=odeset('events',@(t,x) stop_escalera(t,x, th_L));
[t,x]=ode45(f,[0,10],[th_0,0],opts);
plot(t,x(:,1));
%posición final e instante
disp([th_L*180/pi,t(end)])
%velocidad y posición final de la pared móvil
vPared=-m*cos(th_L)*sqrt(3*9.8*L*cos(th_L))/(2*(m+M));
xPared=-m*L*(sin(th_L)-sin(th_0))/(m*M);
disp([xPared,vPared])
set(gca,'YTick',0:pi/12:pi/2)
set(gca,'YTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
xlabel('t')
ylabel('\theta')
title('Escalera, pared móvil')
%conservación de la energía
E0=m*9.8*L*cos(th_0); %energía inicial
%energía final
E=m*L^2*(2/3-m*cos(x(end,1)).^2/(2*(m+M))).*x(end,2).^2+m*9.8*L*cos(x(end,1));
disp([E0,E])
%detiene el proceso de integración ode45 cuando se alcanza el ángulo límite
function [value,isterminal,direction]=stop_escalera(~,x, th_L)
value=x(1)-th_L;
isterminal=1;
direction=1;
end
%raíces de una ecuación cúbica
function x = raices_3(p)
for i=4:-1:1
p(i)=p(i)/p(1);
end
Q=(p(2)*p(2)-3*p(3))/9;
R=(2*p(2)^3-9*p(2)*p(3)+27*p(4))/54;
x=zeros(3,1); %reserva memoria para un vector de tres elementos
if (R*R)<(Q^3)
tetha=acos(R/sqrt(Q^3));
x(1)=-2*sqrt(Q)*cos(tetha/3)-p(2)/3;
x(2)=-2*sqrt(Q)*cos((tetha+2*pi)/3)-p(2)/3;
x(3)=-2*sqrt(Q)*cos((tetha-2*pi)/3)-p(2)/3;
else
A=-sign(R)*nthroot(abs(R)+sqrt(R*R-Q^3),3);
if A==0
B=0;
else
B=Q/A;
end
x(1)=(A+B)-p(2)/3;
x(2)=-(A+B)/2-p(2)/3+(sqrt(3)*(A-B)/2)*1i;
x(3)=-(A+B)/2-p(2)/3-(sqrt(3)*(A-B)/2)*1i;
end
end
end
53.4949 0.2917 -0.0760 -0.2932 4.2435 4.2438
Los resultados son:
- Angulo límite, θl=53.5°
- Instante en el que se alcanza esta posición, tl=0.29
- Posición de la pared móvil en este instante, xl=-0.076
- Velocidad de la pared móvil en este instante, vl=-0.29
- Energía inicial, E=4.2435, parecida a la energía final E=4.2438
Representamos la posición angular θ de la escalera en función del tiempo t hasta el instante tl

Sea θ0=π/6, la posición angular inicial de la escalera. Si hacemos que la masa de la pared móvil sea grande, por ejemplo M=20, obtenemos un ángulo θl=54.6°, muy próximo al que se obtiene considerando una pared fija (véase la fórmula al principio de esta página)
>> acos(2*cos(pi/6)/3)*180/pi ans = 54.7356
Segunda etapa del movimiento
La pared móvil de masa M se mueve hacia la izquierda con velocidad constante vl
La constancia del momento lineal en un sistema aislado, implica que el centro de masa de la escalera se mueve con velocidad constante vcm hacia la derecha, tal que, m·vcm+Mvl=0
En el sistema de referencia que se mueve con el centro de masa de la escalera, su posición y velocidad es
La energía cinética de la escalera es la suma de la energía cinética de traslación del c.m. y de la energía cinética de rotación alrededor de un eje perpendicular que pasa por el c.m.
La energía potencial del c.m. de la escalera es Ep=mglcosθ. La lagrangiana es
La ecuación del movimiento
La misma que hemos obtenido en la página titulada Escalera apoyada en dos paredes perpendiculares, en la sección, 'El extremo B de la escalera deja de estar en contacto con la pared vertical'
Resolvemos esta ecuación diferencial por procedimientos numéricos con las siguientes condiciones iniciales: en el instante tl, el ángulo que forma la escalera con la vertical es θl y su velocidad angular de rotación es
Cuando la escalera impacta con el suelo, θ=π/2, emplea un tiempo tf en alcanzarlo. La posición de la pared móvil y del c.m. de la escalera serán
ya que durante este intervalo de tiempo se mueven con velocidad constante vl y vcm, respectivamente
Movimiento completo
Resolvemos la ecuación diferencial en θ, mediante
function escalera_bloque
L=0.5; %longitud de la escalera 2L
M=2; %masa de la pared móvil
m=1; %masa de la escalera
th_0=pi/6; %ángulo inicial
%ángulo límite
raiz=raices_3([3*m/(8*(m+M)),0,-3/2,cos(th_0)]);
for i=1:length(raiz)
if raiz(i)>0 && raiz(i)<1
th_L=acos(raiz(i));
break;
end
end
%primera etapa
f=@(t,x) [x(2); (9.8/L-m*cos(x(1))/(m+M))*sin(x(1))/(4/3-m*cos(x(1))^2/(m+M))];
opts=odeset('events',@(t,x) stop_escalera(t,x, th_L));
[t,x]=ode45(f,[0,10],[th_0,0],opts);
hold on
plot(t,x(:,1));
tL=t(end); %final de la primera etapa
%velocidad final de la pared móvil
vPared=-m*cos(th_L)*sqrt(3*9.8*L*cos(th_L))/(2*(m+M));
line([tL,tL],[0,th_L],'color','k','lineStyle','--')
line([0,tL],[th_L,th_L],'color','k','lineStyle','--')
%segunda etapa
opts=odeset('events',@stop_escalera_1);
f=@(t,x) [x(2);(9.8/L-cos(x(1))*x(2)^2)*sin(x(1))/(1/3+sin(x(1))^2)];
[t,x]=ode45(f,[0,10],[th_L,sqrt(3*9.8*cos(th_L)/L)/2],opts);
plot(t+tL,x(:,1))
disp(t(end)+tL) %tiempo total
hold off
set(gca,'YTick',0:pi/12:pi/2)
set(gca,'YTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
xlabel('t')
ylabel('\theta')
title('Escalera, pared móvil')
%conservación de la energía
E0=m*9.8*L*cos(th_0);
E=M*(m+M)*vPared^2/(2*m)+m*L^2*(1/3+sin(x(end,1))^2)*x(end,2).^2
/2+m*9.8*L*cos(x(end,1));
disp([E0,E])
%velocidad angular final
wf=3*9.8*(cos(th_0)-3*M*cos(th_L)^3/(8*(m+M)))/(2*L);
disp([sqrt(wf),x(end,2)])
%detiene el proceso de integración ode45 cuando se alcanza el ángulo límite
function [value,isterminal,direction]=stop_escalera(~,x, th_L)
value=x(1)-th_L;
isterminal=1;
direction=1;
end
%detiene el proceso de integración ode45 cuando se alcanza el ángulo pi/2
function [value,isterminal,direction]=stop_escalera_1(~,x)
value=x(1)-pi/2;
isterminal=1;
direction=1;
end
%raíces de una ecuación cúbica
function x = raices_3(p)
for i=4:-1:2
p(i)=p(i)/p(1);
end
%p(4)=p(4)/p(1);
%p(2)=p(2)/p(1);
%p(3)=p(3)/p(1);
p(1)=1;
Q=(p(2)*p(2)-3*p(3))/9;
R=(2*p(2)^3-9*p(2)*p(3)+27*p(4))/54;
x=zeros(3,1); %reserva memoria para un vector de tres elementos
if (R*R)<(Q^3)
tetha=acos(R/sqrt(Q^3));
x(1)=-2*sqrt(Q)*cos(tetha/3)-p(2)/3;
x(2)=-2*sqrt(Q)*cos((tetha+2*pi)/3)-p(2)/3;
x(3)=-2*sqrt(Q)*cos((tetha-2*pi)/3)-p(2)/3;
else
A=-sign(R)*nthroot(abs(R)+sqrt(R*R-Q^3),3);
if A==0
B=0;
else
B=Q/A;
end
x(1)=(A+B)-p(2)/3;
x(2)=-(A+B)/2-p(2)/3+(sqrt(3)*(A-B)/2)*1i;
x(3)=-(A+B)/2-p(2)/3-(sqrt(3)*(A-B)/2)*1i;
end
end
end
Representamos la posición angular θ de la escalera en función del tiempo t desde el instante t=0, hasta el instante tl y desde el instante tl hasta el instante tf cuando la escalera ha impactado en el suelo θ=π/2
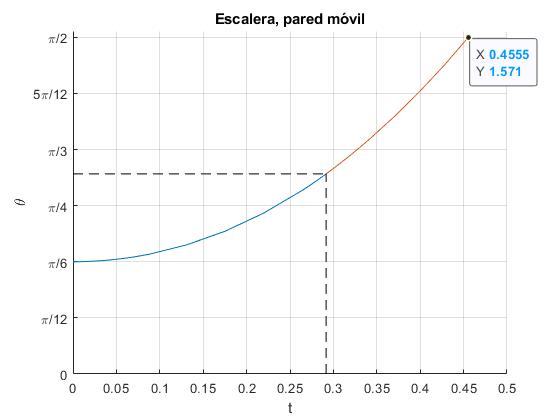
La energía en la segunda etapa del movimiento es
Igualamos la energía inicial mglcosθ0 a la final, cuando θ=π/2, despejamos la velocidad angular dθ/dt en la posición final
Comprobamos que la energía incial es similar a la final y que la velocidad angular dθ/dt final es similar a la que nos proporciona el procedimiento numérico
4.2435 4.2417 %energía
4.8902 4.8890 %velocidad angular final
Actividades
Se introduce
- El ángulo inicial θ0 que forma la escalera con la vertical, en el control titulado Angulo
- La masa M de la pared móvil, en el control titulado Masa pared
El programa interactivo ha fijado los parámetros
- La longitud de la escalera, 2l=1
- La masa de la escalera, m=1
- La pared móvil parte del origen en reposo, x=0, dx/dt=0
- La escalera se deja caer desde su posición inicial θ0, por lo que dθ/dt=0
Se pulsa el botón titulado Nuevo
Observamos que la escalera empieza a caer, a la vez que la pared se mueve hacia la izquierda del origen
Una flecha de color azul muestra la fuerza Fx que ejerce la escalera sobre la pared móvil, mientras la escalera está en contacto con dicha pared. Medimos el ángulo critico θl cuando dicha fuerza se hace cero, el mensaje 'En contacto' desaparece
En la parte derecha, se proporcionan los datos de
- El tiempo, t
- El ángulo θ que hace la escalera con la vertical en grados
- La posición de la pared móvil x
- La posición horizontal xcm del centro de masa de la escalera
Después de que la escalera impacte con el suelo, la pared móvil y la escalera siguen moviéndose con velocidad constante, aunque en la simulación parece que se detengan
Referencias
Daniel Arovas. Lecture Notes on Classical Mechanics (A Work in Progress). University of California, San Diego. May 8, 2013, pp. 393-396. https://courses.physics.ucsd.edu/2010/Fall/physics200a/LECTURES/200_COURSE.pdf