

Equilibrio y estabilidad de una varilla que gira
Una varilla de masa m y longitud 2a gira alrededor del eje Z con velocidad angular constante ω, tal como se muestra en la figura. La varilla puede girar libremente en el plano XZ alrededor del punto A de sujeción.
Estudiamos el equilibrio de la varilla en el Sistema en Referencia en Rotación, (no inercial) X', Z', que se mueve con velocidad angular constante.
La energía cinética de la varilla, que gira alrededor de un eje perpendicular y que pasa por su extremo A es
Para determinar las posiciones de equilibrio solamente precisamos de la energía potencial, que se compone de dos términos: la energía potencial gravitatoria y la centrífuga
Energía potencial
La energía potencial gravitatoria, Eg=mgacosθ
La fuerza centrífuga depende solamente de la distancia x al eje de rotación, es una fuerza conservativa similar a la que ejerce de un muelle elástico.
La fuerza que ejerce un muelle elástico es de sentido contrario al desplazamiento F=-kx, su energía potencial es positiva Ep=kx2/2
La fuerza centrífuga tiene el mismo sentido que el desplazamiento Fc=mω 2·x
y su energía potencial será por tanto negativa . La energía potencial inicial para x=0, se toma como Ec=0.
Para una distribución de masa como la representada por la varilla de masa m, longitud 2a, inclinada un ángulo θ, la energía potencial centrífuga es
La energía potencial total es la suma Ep=Ec+Eg
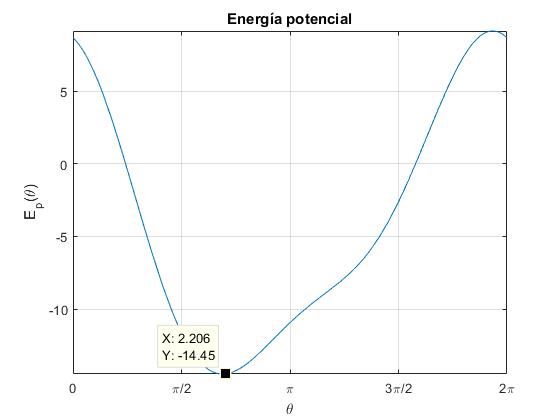
Representamos la energía Ep en función del ángulo θ en el intervalo [0,2π]
a=1; %longitud de la varilla 2a
b=0.5; %distancia al extremo A
w=3; %velocidad angular de rotación
%energía potencial
eP=@(x) 9.8*a*cos(x)-w^2*((b+a*sin(x)).^2+a^2*sin(x).^2/3)/2;
fplot(eP,[0,2*pi])
set(gca,'XTick',0:pi/2:2*pi)
set(gca,'XTickLabel',{'0','\pi/2','\pi','3\pi/2','2\pi'})
grid on
xlabel('\theta')
ylabel('E_p(\theta)')
title('Energía potencial')
Para a=1 (longitud de la varilla 2a=2), distancia del eje de giro al extremo A, b=0.5, cuando gira con velocidad angular ω=3 rad/s, observamos una mínimo en el segundo cuadrante [π/2, π] y un máximo en el cuarto [3π/2,2π]
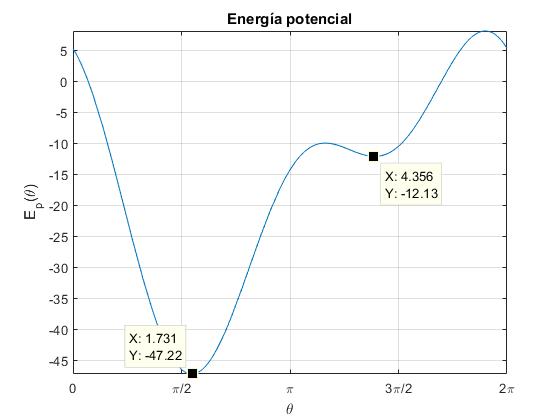
Incrementamos la velocidad angular a ω=6 rad/s, observando un mínimo y un máximo en el tercer cuadrante [π, 3π/2]
Para una velocidad angular muy grande, los mínimos se acercan a π/2 y a 3π/2. El segundo mínimo desaparece a medida que se incrementa b, quedando una sola posición de equilibrio estable a grandes velocidades angulares
Equilibrio
Las posiciones de equilibrio de la varilla son los extremos de la función energía potencial Ep(θ)
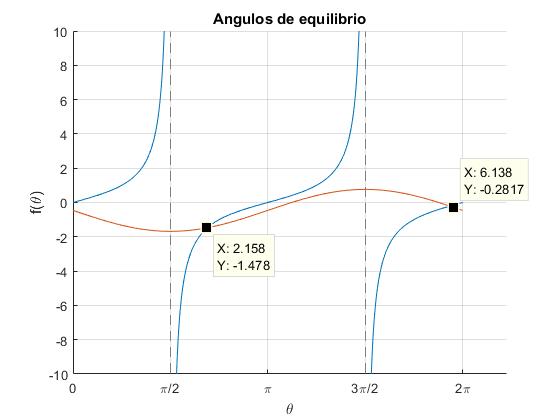
Las posiciones θ de equilibrio son los puntos de intersección de las funciones tanθ y f(θ)
a=1; %longitud de la varilla 2a
b=0.5; %posición del extremo A
w=6; %velocidad angular de rotación
hold on
fplot(@(x) tan(x),[0,2*pi])
f=@(x) -a*w^2*(b/a+4*sin(x)/3)/9.8;
fplot(f,[0,2*pi])
set(gca,'XTick',0:pi/2:2*pi)
set(gca,'XTickLabel',{'0','\pi/2','\pi','3\pi/2','2\pi'})
ylim([-10,10])
hold off
grid on
xlabel('\theta')
ylabel('f(\theta)')
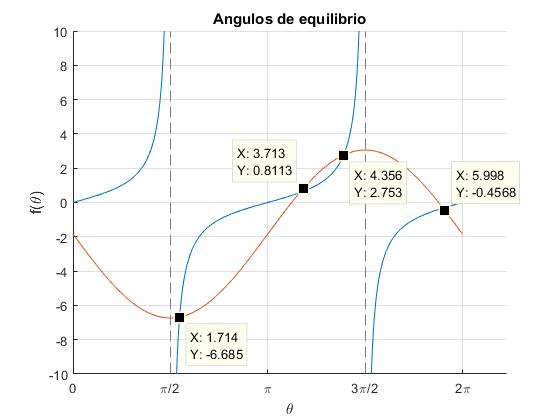
title('Angulos de equilibrio')
Para a=1 (longitud de la varilla 2a=2), distancia del eje de giro al extremo A, b=0.5, cuando gira con velocidad angular ω=3 rad/s, observamos una intersección en el segundo cuadrante [π/2, π] y otra en el cuarto [3π/2,2π], que corresponden al mínimo y al máximo de la energía potencial representada en la primera figura
Incrementamos la velocidad angular a ω=6 rad/s, observando varias intersecciones en el segundo, tercer y cuarto cuadrante que se corresponden con los máximos y mínimos de la energía potencial
Estabilidad
para determinar si el equilibrio es estable o inestable, comprobamos el signo d ela derivada segunda de la energía potencial Ep(θ)
Introduciendo la condición de equilibrio
Volviendo a introducir la condición de equilibrio, llegamos a la expresión más simplificada de la derivada segunda de la energía potencial
En el segundo cuadrante [π/2,π], sinθ>0 y tanθ<0
En el cuarto cuadrante, [3π/2,2π] sinθ<0 y tanθ<0
En el tercer cuadrante, [π,3π/2], escribimos la derivada segunda de la forma
el equilibrio es estable, tal como hemos visto en representación de Ep(θ)
El equilibrio es inestable, tal como hemos visto en representación de Ep(θ)
Como sinθ<0, se pueden producir dos casos:
La derivada segunda es negativa, el equilibrio es inestable, en caso contrario, la derivada segunda es positiva y el equilibrio es estable
Cálculo de las posiciones de equilibrio estable
Calculamos las raíces de la ecuación trascendente
Partiendo de las posiciones de equilibrio aproximadas que nos da la representación gráfica. Calculamos las posiciones de equilibrio utilizando la función fzero de MATLAB. Evaluamos para cada raíz la derivada segunda,
Una vez calculadas las posiciones de equilibrio, evaluamos para cada raíz la derivada segunda, para determinar si es una posición de equlibrio estable o inestable
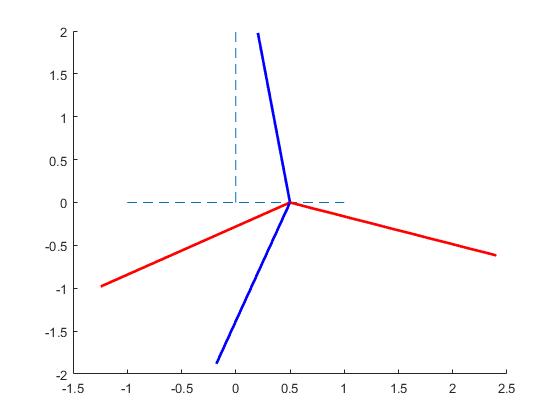
Finalmente, representamos la varilla en las posiciones de equilibrio estable (en azul), o inestable (en rojo). Las líneas vertical y horizontal a trazos son el eje X' y el eje Z', en el Sistema de Referencia que gira con velocidad angular constante ω
a=1; %longitud de la varilla 2a
b=0.5; %posición del extremo A
w=6; %velocidad angular de rotación
raiz=[1.714,3.713,4.356,5.998]; %posiciones aproximadas
%derivada primera
g=@(x) tan(x)+a*w^2*(b/a+4*sin(x)/3)/9.8;
%derivada segunda
ff=@(x) -4*w^2*a*(cos(x)^2-sin(x)^2)/3+w^2*b*sin(x)-9.8*cos(x);
for i=1:length(raiz)
raiz(i)=fzero(g,raiz(i)); %posiciones de equilibrio
fprintf('ángulo %1.3f, derivada segunda, %1.3f\n',raiz(i),ff(raiz(i)));
end
line([0,0],[0,2*a],'lineStyle','--')
line([-a,a],[0,0],'lineStyle','--')
for i=1:length(raiz)
if ff(raiz(i))>0
line([b,b+2*a*cos(raiz(i))],[0,2*a*sin(raiz(i))],'lineWidth',2,'color','b')
else
line([b,b+2*a*cos(raiz(i))],[0,2*a*sin(raiz(i))],'lineWidth',2,'color','r')
end
end
ángulo 1.719, derivada segunda, 65.149 ángulo 3.653, derivada segunda, -25.252 ángulo 4.366, derivada segunda, 23.330 ángulo 5.969, derivada segunda, -53.728
Referencias
Lim Yung-kuo. Problems and Solutions on Mechanics. World Scientific (1994). Problem 1223, pp. 364-367