

Modelos de fuerza de rozamiento
Sea una placa de momento de inercia I, que puede girar alrededor de un eje con velocidad inicial ω0. La velocidad angular de rotación ω disminuye con el tiempo a causa del momento Mr de la fuerza de rozamiento. La ecuación del movimiento es
Examinamos distintos modelos de rozamiento y sus combinaciones
Rozamiento constante
Rozamiento proporcional a la velocidad angular
Rozamiento proporcional al cuadrado de la velocidad angular
Combinación de rozamiento constante y proporcional a la velocidad angular
Combinación de rozamiento constante y proporcional al cuadrado de la velocidad angular
Combinación de rozamiento proporcional a la velocidad y proporcional al cuadrado de la velocidad angular
Combinación de rozamiento constante, proporcional a la velocidad y proporcional al cuadrado de la velocidad angular
Sea Mr=α·I
Integrando la ecuación del movimiento
La velocidad angular disminuye linealmente con el tiempo
Sea Mr=βω·I
Integrando la ecuación del movimiento
La velocidad angular disminuye exponencialmente con el tiempo
Sea Mr=γω2I
Integrando la ecuación del movimiento
Teniendo en cuenta la relación trigonométrica
Despejamos la velocidad angular de rotación ω
Convertimos la fracción en suma de dos fracciones
Completamos cuadrados
Efectuamos el cambio de variable
La integral es inmediata
La integral definida es
Utilizando la fórmula de tan(x+y)
Cuando β=0, obtenemos la ecuación del modelo 5 (combinación de rozamiento constante y proporcional al cuadrado de la velocidad)
Ejemplo
Sean los coeficientes
- α=0.3
- β=0.1
- γ=0.05
La velocidad inicial de rotacion es ω0=1 rad/s
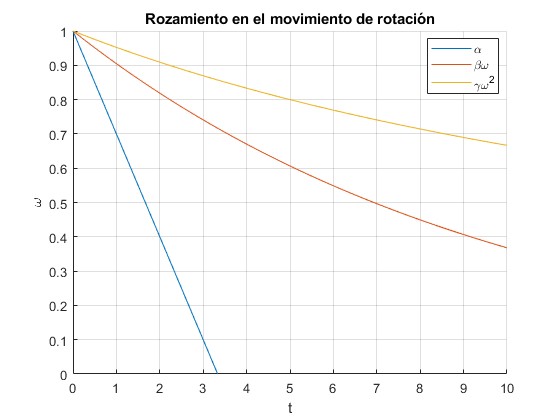
Representamos la velocidad angular ω en función del tiempo para los tres primeros modelos
- Rozamiento constante
- Rozamiento proporcional a la velocidad angular
- Rozamiento proporcional al cuadrado de la velocidad angular
a=0.3;
b=0.1;
c=0.05;
w0=1;
hold on
f=@(t) w0-a*t;
fplot(f,[0,w0/a])
f=@(t) w0*exp(-b*t);
fplot(f,[0,10])
f=@(t) w0./(1+c*w0*t);
fplot(f,[0,10])
hold off
grid on
xlabel('t')
ylabel('\omega')
legend('\alpha','\beta\omega','\gamma\omega^2', 'Location','best')
title('Rozamiento en el movimiento de rotación')
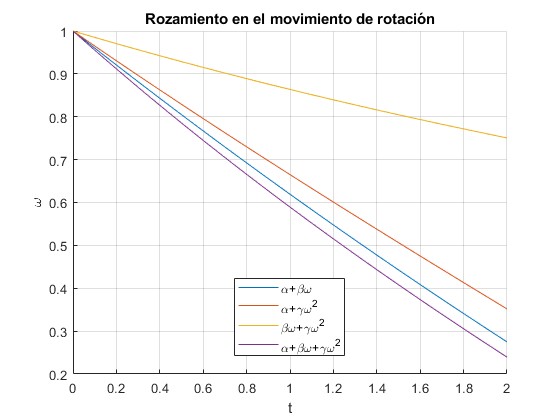
Representamos la velocidad angular ω en función del tiempo para las combinaciones
- de rozamiento constante y proporcional a la velocidad angular
- de rozamiento constante y proporcional al cuadrado de la velocidad angular
- de rozamiento proporcional a la velocidad angular y al cuadrado de la velocidad
- de rozamiento constante, proporcional a la velocidad angular y al cuadrado de la velocidad
a=0.3;
b=0.1;
c=0.05;
w0=1;
hold on
f=@(t) (a/b+w0)*exp(-b*t)-a/b;
fplot(f,[0,2])
f=@(t) (w0-sqrt(a/c)*tan(sqrt(a*c)*t))./(1+w0*sqrt(c/a)*tan(sqrt(a*c)*t));
fplot(f,[0,2])
f=@(t) b*w0./((b+c*w0)*exp(b*t)-c*w0);
fplot(f,[0,2])
f=@(t) (w0+b/(2*c)-sqrt(4*c*a-b^2)*tan(sqrt(4*c*a-b^2)*t/2)/(2*c))./(1+(b+2*c*w0)*
tan(sqrt(4*c*a-b^2)*t/2)/sqrt(4*c*a-b^2))-b/(2*c);
fplot(f,[0,2])
hold off
grid on
xlabel('t')
ylabel('\omega')
legend('\alpha+\beta\omega', '\alpha+\gamma\omega^2','\beta\omega+\gamma\omega^2',
'\alpha+\beta\omega+\gamma\omega^2', 'Location','best')
title('Rozamiento en el movimiento de rotación')
Referencias
Pascal Klein, Andreas Müller, Sebastian Gröber, Alexander Molz, Jochen Kuhn. Rotational and frictional dynamics of the slamming of a door. Am. J. Phys. 85 (1), January 2017. pp. 30-37