

Escalera apoyada en dos paredes perpendiculares.
Estática
Supongamos una escalera homogénea de masa m y longitud l apoyada en dos paredes perpendiculares en los puntos A (lsinθ,0) y B (0, lcosθ,0), siendo θ el ángulo que forma la escalera con el eje vertical Y. Las fuerzas sobre la escalera son las que se ha dibujado en la figura.
FA y FB son las fuerzas de rozamiento que ejercen las paredes vertical y horizontal en los respectivos apoyos.
NA y NB son las reacciones de la pared en los puntos de apoyo
mg es el peso que actúa en el centro de masas de la escalera a una distancia d de A. Si la escalera es homogénea d=l/2.
La situación de equilibrio solamente nos proporciona tres ecuaciones (dos para las fuerzas y una para los momentos), sin embargo, tenemos cuatro incógnitas, el problema es indeterminado.
Para que la escalera pernanezca en equilibrio se tiene que cumplir que las fuerzas de rozamiento FA y FB sean menores que sus valores máximos. Si μA y μB son los coeficientes estáticos en las paredes vertical y horizontal, respectivamente
Estas dos desigualdades conducen a una relación entre ambos coeficientes de rozamiento. De la tercera ecuación de equilibrio, la de los momentos, despejamos FB
A partir de ambas desigualdades obtenemos
Esta es la relación entre los parámetros de la escalera. Si se incrementa el ángulo θ, se alcanza un ángulo θs en el que la escalera empieza a deslizar. Para este ángulo al menos una de las dos desigualdades deja de cumplirse, FA>μA·NA y/o FB>μB·NB. El caso más sencillo se produce cuando FB=0, no hay rozamiento en la pared vertical, entonces tanθ≤2μA. El ángulo límite es tanθs=2μA
La escalera está en equilibrio, en reposo, cuando el ángulo θ que forma con la vertical es θ<θs
La escalera empieza a deslizar cuando el ángulo θ que forma con la dirección vertical es θ≥θs.
Paredes lisas (sin rozamiento)
El caso más sencillo corresponde a una escalera apoyada en paredes perpendiculares sin rozamiento. Cualquiera que sea el ángulo 0<θ<π/2, la escalera empieza a deslizar
El extremo B de la escalera permanece en contacto con la pared vertical
Supondremos que la escalera es un sólido rígido en forma de varilla, de masa m y longitud l. Su momento de inercia respecto a un eje perpendicular al plano de la escalera y que pasa por el centro de masas es Ic=ml2/12
La dinámica de la escalera se describe mediante dos ecuaciones:
- La ecuación del movimiento de traslación del centro de masas
- La ecuación de la dinámica de rotación alrededor de un eje perpendicular al plano de la escalera que pasa por el centro de masas C
La posición, velocidad y aceleración del centro de masas C son:
La ecuación del movimiento de traslación del centro de masas es
La ecuación de la dinámica de rotación alrededor de un eje perpendicular al plano de la escalera que pasa por el centro de masas C es
Se resuelve esta ecuación diferencial por procedimientos numéricos con las siguientes condiciones iniciales, en el instante t=0, θ=θ0, dθ/dt=0. Se suelta la escalera cuando forma un ángulo θ0 con la dirección vertical
El ángulo θ va creciendo a medida que la escalera va cayendo, hasta que la reacción NB se hace cero.
Resolvemos la ecuación diferencial del movimiento, utilizando la función ode45 de MATLAB, partiendo del ángulo θ0=π/6 (30°). Detenemos el proceso de integración cuando el ángulo θ=π/2, la escalera impacta con el suelo. Para ello definimos la función stop_escalera_1
function [value,isterminal,direction]=stop_escalera_1(t,x)
value=x(1)-pi/2;
isterminal=1;
direction=1;
end
Representamos la reacción NB en función del ángulo θ, señalamos la raíz θl, cuando NB=0, que calcularemos más adelante empleando el principio de conservación de la energía. En esa posición la escalera deja de tener contacto con la pared vertical por lo que tendremos que plantear otras ecuaciones para describir el movimiento de la escalera desde dicha posición θl hasta que impacta con el suelo θ=π/2
L=1; %longitud de la escalera
th_0=pi/6; %ángulo inicial
f=@(t,x) [x(2);3*9.8*sin(x(1))/(2*L)];
opts=odeset('events',@stop_escalera_1);
[t,x]=ode45(f,[0,1],[th_0,0],opts);
N_B=L*sin(x(:,1)).*(3*9.8*cos(x(:,1))/(2*L)-x(:,2).^2)/2;
hold on
plot(x(:,1), N_B);
th_L=acos(2*cos(th_0)/3);
plot(th_L,0, 'o','markersize',3,'markeredgecolor','r','markerfacecolor','r')
hold off
set(gca,'XTick',0:pi/12:pi/2)
set(gca,'XTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
ylabel('N_B')
xlabel('\theta')
title('Escalera, sin rozamiento')
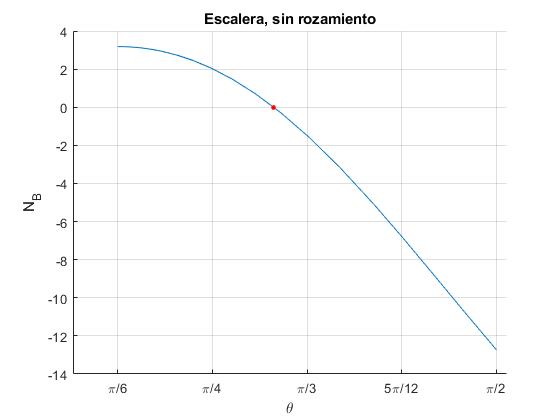
El ángulo límite θl=0.95 (55°)
>> th_L*180/pi ans = 54.7356
Conservación de la energía
Aplicamos el principio de conservación de la energía para determinar dicho ángulo. En las figuras, comparamos la situación inicial y en el instante t. La energía potencial del c.m. se va convirtiendo en energía cinética de traslación del c.m. y de rotación alrededor de un eje que pasa por el c.m.
Las reacciones en A y en B valen
NB se hace cero para el ángulo
En esta posición, la velocidad angular de rotación alrededor de un eje que pasa por el c.m. es
El extremo B de la escalera deja de estar en contacto con la pared vertical
La dinámica de la escalera se describe mediante dos ecuaciones:
- La ecuación del movimiento de traslación del centro de masas
- La ecuación de la dinámica de rotación alrededor de un eje perpendicular al plano de la escalera que pasa por el centro de masas C
A partir de la posición θl, las ecuaciones del movimiento de la escalera son:
Ecuación del movimiento de traslación del centro de masas
Ecuación de la dinámica de rotación alrededor de de un eje perpendicular al plano de la escalera que pasa por el centro de masas C
La velocidad horizontal del centro de masas dx/dt es constante, ya que no hay ninguna fuerza horizontal. Esta es la velocidad del c.m. en la posición θl
Se resuelve la ecuación diferencial
mediante la función ode45 de MATLAB, con las siguientes condiciones iniciales, en el instante t=tl, la posición de la escalera es θ=θl y su velocidad angular inicial es
Movimiento completo
El movimiento de la escalera desde la posición inicial θ0 hasta la posición final π/2, se describe mediante dos ecuaciones diferenciales de segundo orden:
la primera, en el intervalo (θ0, θl)
la segunda, en el intervalo (θl, π/2)
Definimos dos funciones: una función que detenga el primer proceso de integración cuando se alcance el ángulo θl. Otra función, para el segundo proceso de integración que comienza en éste ángulo y se detiene para el ángulo π/2
function [value,isterminal,direction]=stop_escalera(t,x, th_L)
value=x(1)-th_L;
isterminal=1;
direction=1;
end
function [value,isterminal,direction]=stop_escalera_1(t,x)
value=x(1)-pi/2;
isterminal=1;
direction=1;
end
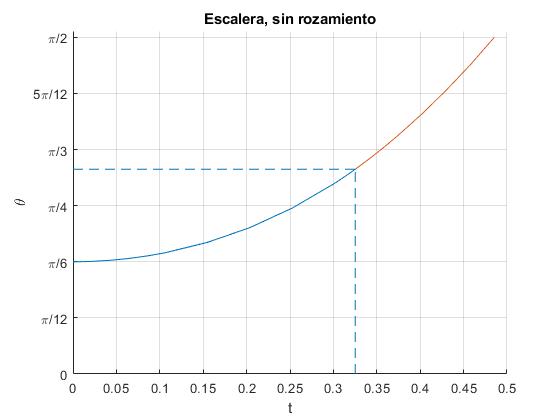
Consideremos una escalera de longitud l=1, que se suelta cuando forma un ángulo θ0=π/6 (30°) con la vertical. Representamos el ángulo θ que hace la escalera con la dirección vertical en función del tiempo t
L=1; %longitud de la escalera
th_0=pi/6; %ángulo inicial
th_L=acos(2*cos(th_0)/3); %ángulo límite para reacción nula
f=@(t,x) [x(2);3*9.8*sin(x(1))/(2*L)];
opts=odeset('events',@(t,x) stop_escalera(t,x, th_L));
[t,x]=ode45(f,[0,10],[th_0,0],opts);
hold on
plot(t,x(:,1));
tL=t(end); %final del primer proceso
opts=odeset('events',@stop_escalera_1);
f=@(t,x) [x(2);(2*9.8/L-cos(x(1))*x(2)^2)*sin(x(1))/(1/3+sin(x(1))^2)];
[t,x]=ode45(f,[0,10],[th_L,sqrt(9.8*cos(th_0)/L)],opts);
plot(t+tL,x(:,1))
line([0,tL],[th_L,th_L],'lineStyle','--')
line([tL,tL],[0,th_L],'lineStyle','--')
hold off
set(gca,'YTick',0:pi/12:pi/2)
set(gca,'YTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
xlabel('t')
ylabel('\theta')
title('Escalera, sin rozamiento')
La velocidad angular final de la escalera es
>> x(end,2) ans = 4.8300
Conservación de la energía
Calculamos esta velocidad angular final aplicando el principio de conservación de la energía
Para la posición final, θ=π/2
>> vf=sqrt(9.8*(cos(th_0)-cos(th_0)^3/9)/(L/3)) %velocidad final vf = 4.8311
Paredes con rozamiento
El extremo B de la escalera permanece en contacto con la pared vertical
Si el ángulo inicial θ0 que forma la escalera con la dirección vertical es mayor que el límite, θ0>θs la escalera empieza a deslizar. Las fuerzas de rozamiento FA y FB disminuyen ligeramente, ya que el coeficiente cinético μk suele ser menor que el estático μs
Cuando la escalera desliza, las fuerzas de rozamiento valen, FA=μA·NA y FB=μB·NB
En el apartado anterior ya hemos calculado, el vector posición, velocidad y aceleración del centro de masas en términos del ángulo θ
La dinámica de la escalera se describe mediante dos ecuaciones:
- La ecuación del movimiento de traslación del centro de masas
- La ecuación de la dinámica de rotación alrededor de un eje perpendicular al plano de la escalera que pasa por el centro de masas C
Despejamos NA y NB del sistema de dos ecuaciones
La ecuación de la dinámica de rotación alrededor de un eje perpendicular al plano de la escalera que pasa por el centro de masas C es
Introduciendo las expresiones de NA y NB, despejamos d2θ/dt2
Se resuelve esta ecuación diferencial por procedimientos numéricos con las siguientes condiciones iniciales, en el instante t=0, θ=θ0, dθ/dt=0. Se suelta la escalera cuando forma un ángulo θ0>θs con la dirección vertical
Equilibrio
Cuando la escalera está en reposo a punto de empezar a deslizar, dθ/dt=0 y d2θ/dt2=0
Coeficientes iguales
En el caso de que los coeficientes de rozamiento sean iguales, μA=μB=μ, las expresiones de NA, NB y d2θ/dt2, se reducen notablemente
El ángulo θ va creciendo a medida que la escalera va cayendo, hasta que la reacción NB se hace cero, cuando el extremo B deja de estar en contacto con la pared vertical.
Sea una escalera de longitud l=1 m, los coeficientes de rozamiento son iguales μA=μB=μ=0.3. El ángulo de equilibrio, tanθs=2μ/(1-μ2), es 0.58 (33.4°). Soltamos la escalera dθ/dt=0, cuando forma un ángulo θ0=35°, θ0>θs, resolvemos la ecuación diferencial utilizando la función ode45 de MATLAB y representamos NB en función del ángulo θ
L=1; %longitud de la escalera+
mu=0.3; %empieza a deslizar con 33.4º
th_0=35*pi/180; %ángulo inicial
f=@(t,x) [x(2);3*(9.8*((1-mu^2)*sin(x(1))-2*mu*cos(x(1)))/L+mu*x(2)^2)/(2-mu^2)];
[t,x]=ode45(f,[0,1],[th_0,0]);
acel=3*(9.8*((1-mu^2)*sin(x(:,1))-2*mu*cos(x(:,1)))/L+mu*x(:,2).^2)/(2-mu^2);
N_B=mu*9.8/(1+mu^2)+L*((cos(x(:,1))-mu*sin(x(:,1))).*acel-(sin(x(:,1))+
mu*cos(x(:,1))).*x(:,2).^2)/(2*(1+mu^2));
plot(x(:,1), N_B);
set(gca,'XTick',0:pi/12:pi/2)
set(gca,'XTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
ylabel('N_B')
xlabel('\theta')
title('Escalera, con rozamiento')
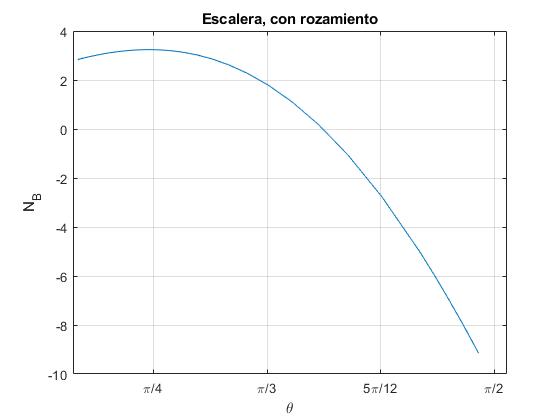
La reacción en el extremo B, NB se anula para un ángulo θl cercano a 1.16 (66°)
El extremo B de la escalera deja de estar en contacto con la pared vertical
La dinámica de la escalera se describe mediante dos ecuaciones:
- La ecuación del movimiento de traslación del centro de masas
- La ecuación de la dinámica de rotación alrededor de un eje perpendicular al plano de la escalera que pasa por el centro de masas C
Siguiendo los mismos pasos que en el apartado anterior, la ecuación del movimiento de traslación del centro de masas es
La ecuación de la dinámica de rotación alrededor de de un eje perpendicular al plano de la escalera que pasa por el centro de masas C es
Movimiento completo
El movimiento de la escalera desde la posición inicial θ0 hasta la posición final π/2, se describe mediante ecuaciones diferenciales de segundo orden:
la primera, en el intervalo (θ0, θl)
la segunda, en el intervalo (θl, π/2)
Definimos dos funciones: una función que detenga el primer proceso de integración cuando se alcance el ángulo θl y de comienzo al segundo proceso de integración y otra que detenga la integración para el ángulo π/2
function [value,isterminal,direction]=stop_escalera_2(t,x, mu, L)
acel=3*(9.8*((1-mu^2)*sin(x(1))-2*mu*cos(x(1)))/L+mu*x(2)^2)/(2-mu^2);
N_B=mu*9.8/(1+mu^2)+L*((cos(x(1))-mu*sin(x(1)))*acel-(sin(x(1))+
mu*cos(x(1)))*x(2)^2)/(2*(1+mu^2));
value=N_B;
isterminal=1;
direction=-1;
end
function [value,isterminal,direction]=stop_escalera_1(t,x)
value=x(1)-pi/2;
isterminal=1;
direction=1;
end
Consideremos una escalera de longitud l=1, que se suelta cuando forma un ángulo θ0=35° con la vertical. Representamos el ángulo θ que hace la escalera con la dirección vertical en función del tiempo t
L=1; %longitud de la escalera+
mu=0.3; %empieza a deslizar con 33.4º
th_0=35*pi/180; %ángulo inicial
f=@(t,x) [x(2);3*(9.8*((1-mu^2)*sin(x(1))-2*mu*cos(x(1)))/L+mu*x(2)^2)/(2-mu^2)];
opts=odeset('events',@(t,x) stop_escalera_2(t,x, mu,L));
[t,x]=ode45(f,[0,10],[th_0,0],opts);
hold on
plot(t,x(:,1));
tL=t(end); %instante NB=0
disp([tL,x(end,1)*180/pi])
opts=odeset('events',@stop_escalera_1);
f=@(t,x) [x(2);(sin(x(1))-mu*cos(x(1)))*(2*9.8/L-cos(x(1))*x(2)^2)/(1/3+(sin(x(1))
-mu*cos(x(1)))*sin(x(1)))];
[t,x]=ode45(f,[0,10],[x(end,1),x(end,2)],opts);
plot(t+tL,x(:,1))
hold off
set(gca,'YTick',0:pi/12:pi/2)
set(gca,'YTickLabel',{'0','\pi/12','\pi/6','\pi/4','\pi/3','5\pi/12','\pi/2'})
grid on
xlabel('t')
ylabel('\theta')
title('Escalera, con rozamiento')
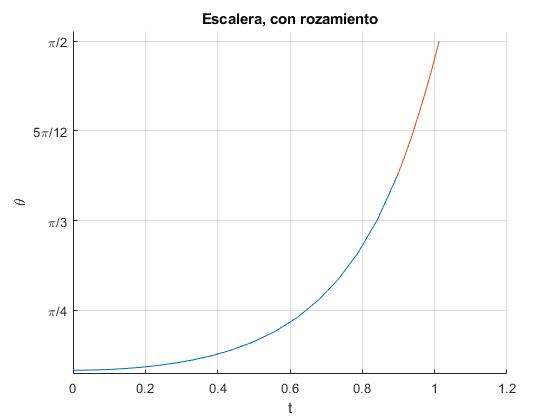
La primera etapa del movimiento se representa en color azul, la segunda, cuando la escalera ya no se apoya en la pared vertical, en rojo. El instante tl y el ángulo θl son
0.8961 67.4112
Actividades
Se introduce
- El ángulo θ0 que forma la escalera con la vertical, en el control titulado Ángulo
- El coeficiente de rozamiento μs=μk=μ, en el control titulado Coef. rozamiento.
- Se han fijado la longitud de la escalera en L=1 m y la masa m=1 kg
Se pulsa el botón titulado Nuevo
El programa interactivo nos suministra los datos del tiempo t, el ángulo θ que forma la escalera con la dirección vertical, las reacciones NB en el apoyo B en la pared vertical y NA en el apoyo A en el suelo
Si el ángulo θ0 es menor que el ángulo límite tanθs=2μ/(1-μ2), el programa interactivo nos invita a disminuir el coeficiente de rozamiento o a aumenta el ángulo inicial
Cuando la escalera empieza a deslizar, nos fijaremos en la reacción NB en el apoyo B con la pared vertical, actuando en el botón paso a paso >| medimos el instante tl y el ángulo θl en el que NB=0, la escalera deja de estar en contacto con la pared vertical.
Referencias
Yehuda Salu. Revisiting the Ladder on the Wall Problem. The Physics Teacher 49, May 2011, 289-290
Sebastian Glane, Wolfgang H. Müller. The sliding ladder problem revisited in phase space. Am. J. Phys. 87 (6) June 2019, 444-448
Sebastian Glane. Combining dynamics and numerics using the falling ladder problem. Eur. J. Phys. 40 (2019) 055001