

Sucesivos rebotes en un plano inclinado
Rebotes en el plano inclinado (I)
Situación inicial: caída libre
La pelota se deja caer verticalmente desde una altura h0. Parte con velocidad inicial cero, desde la posición
x0=-h0·sinθ,
y0=h0·cosθ
Las componentes de la aceleración son
ax=g·sinθ
ay=-g·cosθ
El movimiento a lo largo de la recta vertical es la composición de dos movimientos uniformemente acelerados. Las componentes de la velocidad en función del tiempo son
vx= g·sinθ·t
vy=-g·cosθ·t
Las coordenadas de la pelota son
La trayectoria es la línea recta y=-x/tanθ
La pelota llega al origen x=0, y=0 en el instante
La velocidad con la que llega al origen es
vx= g·sinθ·t0
vy=-g·cosθ·t0
Primera etapa
La pelota rebota:
-
La componente X de su velocidad no se modifica, v0x=vx
-
La componente Y de su velocidad cambia de sentido y disminuye su módulo, v0y=-e·vy
La pelota parte del origen x0=0, y0=0, en el instante t0, con una velocidad inicial
v0x= g·sinθ·t0
v0y=e·g·cosθ·t0
Las componentes de la velocidad en función del tiempo son
vx=v0x+g·sinθ·(t-t0)
vy=v0y-g·cosθ·(t-t0)
Las coordenadas de la pelota son
La pelota llega al plano inclinado cuando y=0, en el instante t1.
La posición x1 del punto de impacto es
Las componentes de la velocidad final son
vx=g·t0·(1+2e)·sinθ
vy=-e·g·t0·cosθ
Segunda etapa
La pelota rebota:
-
La componente X de su velocidad no se modifica, v1x=vx
-
La componente Y de su velocidad cambia de sentido y disminuye su módulo, v1y=-e·vy
La pelota parte de la posición x1, y1=0 en el instante t1, con una velocidad inicial
v1x= g·t0·(1+2e)·sinθ
v1y=e2·g·t0·cosθ
Las componentes de la velocidad en función del tiempo son
vx=v1x+ g·sinθ·(t-t1)
vy=v1y-g·cosθ·(t-t1)
Las coordenadas de la pelota son
La pelota llega al plano inclinado cuando y=0, en el instante t2.
La posición x2 del punto de impacto es
Las componentes de la velocidad final son
vx=g·t0·(1+2e+2e2)·sinθ
vy=-e2·g·t0·cosθ
Tercera etapa
La pelota rebota:
-
La componente X de su velocidad no se modifica, v2x=vx
-
La componente Y de su velocidad cambia de sentido y disminuye su módulo, v2y=-e·vy
La pelota parte de la posición x2, y2=0, en el instante t2, con una velocidad inicial
v2x= g·t0·(1+2e+2e2)·sinθ
v2y=e3·g·t0·cosθ
Las componentes de la velocidad en función del tiempo son
vx=v2x+ g·sinθ·(t-t2)
vy=v2y-g·cosθ·(t-t2)
Las coordenadas de la pelota son
La pelota llega al plano inclinado cuando y=0, en el instante t3.
La posición x3 del punto de impacto es
Las componentes de la velocidad final son
vx=g·t0·(1+2e+2e2+2e3)·sinθ
vy=-e3·g·t0·cosθ
Cuarta etapa
La pelota rebota:
-
La componente X de su velocidad no se modifica, v3x=vx
-
La componente Y de su velocidad cambia de sentido y disminuye su módulo, v3y=-e·vy
La pelota parte de x3, y3=0, en el instante t3, con una velocidad inicial
v3x= g·t0·(1+2e+2e2+2e3)·sinθ
v3y=e4·g·t0·cosθ
Las componentes de la velocidad de la pelota en función del tiempo son
vx=v3x+ g·sinθ·(t-t3)
vy=v3y-g·cosθ·(t-t3)
Las coordenadas de la pelota son
La pelota llega al plano inclinado cuando y=0, en el instante t4.
La posición x4 del punto de impacto es
Las componentes de la velocidad final son
vx=g·t0·(1+2e+2e2+2e3+2e4)·sinθ
vy=-e4·g·t0·cosθ
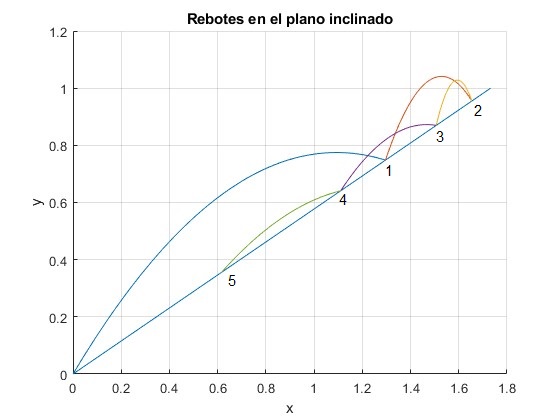
Ejemplo
Dejamos caer una pelota desde una altura h0=1 m, sobre un plano inclinado θ=15°. El coeficiente de restitución es e=0.8. Vamos a representar la trayectoria de la pelota sobre el plano inclinado. Para ello es necesario girar los ejes un ángulo θ tal como se aprecia en la figura
t0=sqrt(2*1/9.8); %cae desde una altura de 1 m
th=pi/12; % plano inclinado
ex=0.8; %coeficiente de restitución
x0=0;
vx=9.8*sin(th)*t0; %velocidad inicial
vy=-9.8*cos(th)*t0;
tt=t0; %tiempo total
hold on
line([0,10*cos(th)],[0,-10*sin(th)])
for i=1:5
v0x=vx; %velocidad inicial
v0y=-ex*vy;
x=@(t) x0+v0x*t+4.9*sin(th)*t.^2; %ejes X a lo largo del plano inclinado
y=@(t) v0y*t-4.9*cos(th)*t.^2;
xp=@(t) x(t)*cos(th)+y(t)*sin(th);
yp=@(t) -x(t)*sin(th)+y(t)*cos(th);
t1=2*v0y/(9.8*cos(th));
fplot(xp,yp,[0,t1])
tt=tt+t1;
disp([tt,x(t1)]) %tiempo, distancia del choque al origen
x0=x(t1);
vx=v0x+9.8*sin(th)*t1; %velocidad final
vy=v0y-9.8*cos(th)*t1;
end
hold off
grid on
xlabel('x')
ylabel('y')
title('Rebotes en el plano inclinado')
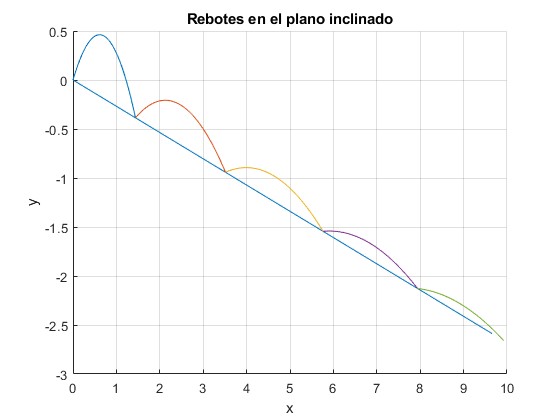
Los tiempos t1, t2, ... y las posiciones de impacto sobre el plano inclinado x1, x2, ... son
t x
1.1746 1.4908
1.7528 3.6375
2.2154 5.9656
2.5855 8.2188
2.8815 10.2715
Etapa n
Al finalizar la etapa n, la posición de la pelota es
que se alcanza en el instante
Las componentes de la velocidad final son
Después de muchos rebotes (n→∞)
Sabiendo que
es la suma de los infinitos términos de una progresión geométrica cuyo primer término es a0=1, y cuya razón es e<1
El valor de t∞ es idéntico al que hemos obtenido para el caso de rebotes en el plano horizontal.
Las componentes de la velocidad tienden a
Teniendo en cuenta que
Comprobamos con e=0.8, y n=200
x=0.8; %coeficiente de restitución n=200; k=1:n; s=sum(k.*(x.^k+x.^(2*n+1-k))); y=x/(1-x)^2; disp([s, y])
>> 20.0000 20.0000
Utilizamos Math Symbolic para sumar la serie
>> syms x k n; >> assume(x>0 & x<1); >> sum=symsum(k*(x^k+x^(2*n+1-k)),k,1,n) sum =(x - x*x^n - n*x*x^n + n*x^n*x^2)/(x - 1)^2 - (x^n*x^2 - x^(2*n)*x^2 - n*x*x^n + n*x^n*x^2)/(x - 1)^2 >> limit(sum,n,inf) ans =x/(x - 1)^2
La posición de los sucesivos rebotes en el plano inclinado, alcanza un límite x∞
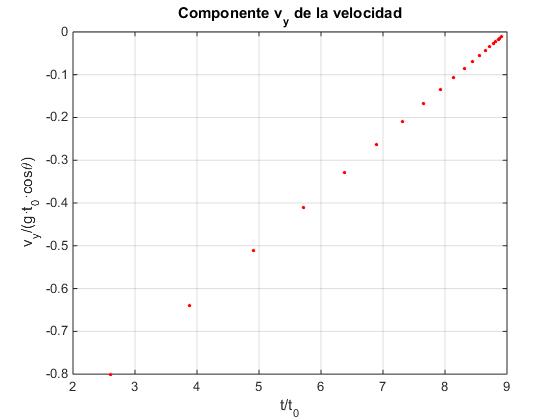
En la figura, se muestra la variación de la componente Y de la velocidad, al final de cada una de las etapas del movimiento de la pelota. Como vemos vy tiende a cero cuando t→t∞.
e=0.8; %coeficiente de restitución
N=20;
t=zeros(N,1);
v=zeros(N,1);
for n=1:N;
k=1:n;
t(n)=1+2*e*sum(e.^(k-1));
v(n)=-e^n;
end
plot(t,v,'ro','markersize',2,'markerfacecolor','r')
grid on
xlabel('t/t_0')
ylabel('v_y/(g·t_0·cos\theta)')
title('Componente v_y de la velocidad')
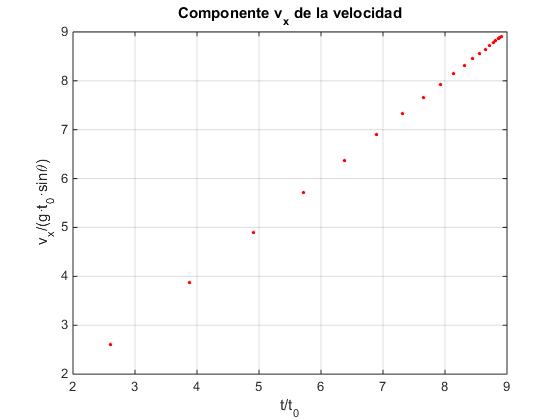
En la figura, se muestra la variación de la componente X de la velocidad, al final de cada una de las etapas del movimiento de la pelota. Como vemos vx tiende a un valor límite cuando t→t∞.
e=0.8; %coeficiente de restitución
N=20;
t=zeros(N,1);
v=zeros(N,1);
for n=1:N;
k=1:n;
t(n)=1+2*e*sum(e.^(k-1));
v(n)=t(n);
end
plot(t,v,'ro','markersize',2,'markerfacecolor','r')
grid on
xlabel('t/t_0')
ylabel('v_x/(g·t_0·sin\theta)')
title('Componente v_x de la velocidad')
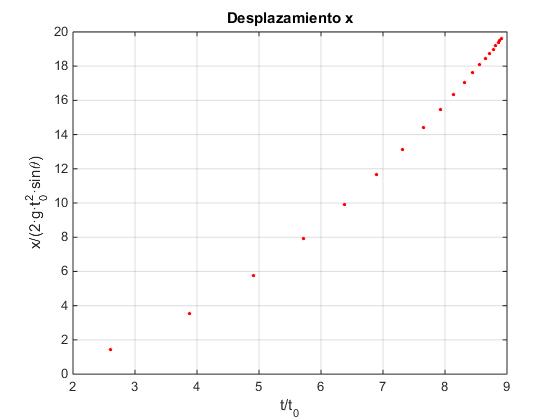
En la figura, se muestra la posición xi de la pelota en el momento que rebota en el plano inclinado Como vemos x no crece indefinidamente, sino que tiende a un valor límite x∞ cuando t→t∞.
e=0.8; %coeficiente de restitución
N=20;
t=zeros(N,1);
x=zeros(N,1);
for n=1:N;
k=1:n;
t(n)=1+2*e*sum(e.^(k-1));
x(n)=sum(k.*(e.^k+e.^(2*n+1-k)));
end
plot(t,x,'ro','markersize',2,'markerfacecolor','r')
grid on
xlabel('t/t_0')
ylabel('x/(2·g·t_0^2·sin\theta)')
title('Desplazamiento x')
Actividades
Se introduce
- El ángulo del plano inclinado θ, en el control titulado Pendiente
- El coeficiente de restitución e, en el control titulado Coef. restitución
- La altura desde la que se deja cera la pelota h0, se ha fijado en h0=1 m.
Se pulsa el botón titulado Nuevo
Se observa los sucesivos rebotes de la pelota en el plano inclinado.
En la parte superior, se proporcionan los datos de la posición y velocidad de la pelota en función del tiempo, referidos a un sistema de Referencia en el que el eje X está en el plano horizontal y el eje Y es perpendicular al mismo
Rebotes en el plano inclinado (II)
Describimos en este apartado, una variante del problema descrito en el primero. Se lanza la pelota hacia el origen con velocidad v0 haciendo un ángulo φ con el plano inclinado.
Cuando la pelota choca con el plano inclinado
- La componente X de su velocidad no se modifica, v0x=v0cosφ
- La componente Y de su velocidad cambia de sentido y disminuye su módulo, v0y=e·v0sinφ
Vamos a estudiar este ejemplo
- Angulo del plano inclinado, θ=π/6 (30°)
- Coeficiente de restituación, e=0.8
- Velocidad inicial de la pelota, v0=5 m/s
- Angulo de la velocidad, φ=π/6, se lanza horizontalmente hacia el origen
Primera etapa
- La posición inicial para la primera etapa del movimiento es x0=0 m, parte del origen
- La velocidad inicial es, v0x=4.3301 m/s, v0y=2.0000 m/s
Las ecuaciones del movimiento son
La pelota llega al plano inclinado y=0, en el instante t1
Para este ejemplo, t1=0.4713 s, la posición del punto de impacto es
x1=1.4966 m. Las componentes de la velocidad final antes del próximo choque son
vx=2.0207 m/s, vy=-2.0000 m/s.
La componente vx de la velocidad se anula en el instante
tx=0.8837 s. A partir de este instante, la pelota inicia su movimiento hacia abajo, pero antes, rebotará sobre el plano inclinado como vamos a comprobar
Segunda etapa
- La posición inicial para la segunda etapa del movimiento es x1=1.4966 m,
- La velocidad inicial es, v0x=vx=2.0207 m/s, v0y=-e·vy=1.6000 m/s
Las ecuaciones del movimiento son
La pelota llega al plano inclinado y=0, en el instante t2
Para este ejemplo, t2=0.8484 s, la posición del punto de impacto es
x2=1.9102 m. Las componentes de la velocidad final antes del próximo choque son
vx=0.1732 m/s, vy=-1.6000 m/s.
Tercera etapa
- La posición inicial para la tercera etapa del movimiento es x2=1.9102 m,
- La velocidad inicial es, v0x=vx=0.1732 m/s, v0y=-e·vy=1.2800 m/s
Las ecuaciones del movimiento son
La pelota llega al plano inclinado y=0, en el instante t3
Para este ejemplo, t3=1.1500 s. Este tiempo es mayor que tx, la componente vx de la velocidad ha cambiado de signo y la partícula cambia el sentido del movimiento (hacia abajo)
La posición del punto de impacto es
x3=1.7396 m que es menor que x2. Las componentes de la velocidad final antes del próximo choque son
vx=-1.3048 m/s (ha cambiado de signo), vy=-1.2800 m/s.
Etapa n
Representamos la trayectoria de la pelota
th=pi/6; % plano inclinado 30º
ex=0.8; %coeficiente de restitución
x0=0; %parte del origen
v0=5; %velocidad inicial
phi=th; %ángulo de la velocidad con el plano inclinado
vx=v0*cos(phi); %velocidad inicial
vy=-v0*sin(phi);
tt=0; %tiempo total
hold on
line([0,2*cos(th)],[0,2*sin(th)])
disp([' t',' x'])
for i=1:5
v0x=vx; %velocidad inicial
v0y=-ex*vy;
x=@(t) x0+v0x*t-4.9*sin(th)*t.^2; %ejes X a lo largo del plano inclinado
y=@(t) v0y*t-4.9*cos(th)*t.^2;
xp=@(t) x(t)*cos(th)-y(t)*sin(th);
yp=@(t) x(t)*sin(th)+y(t)*cos(th);
t1=2*v0y/(9.8*cos(th));
fplot(xp,yp,[0,t1])
tt=tt+t1;
disp([tt,x(t1)]) %tiempo, distancia del impacto al origen
x0=x(t1);
vx=v0x-9.8*sin(th)*t1; %velocidad final
vy=v0y-9.8*cos(th)*t1;
end
hold off
grid on
xlabel('x')
ylabel('y')
title('Rebotes en el plano inclinado')
Los tiempos t1, t2, ... y las posiciones de impacto sobre el plano inclinado x1, x2, ... son
t x
0.4713 1.4966
0.8484 1.9102
1.1500 1.7395
1.3913 1.2820
1.5843 0.7106
Actividades
Se introduce
- El ángulo del plano inclinado θ, en el control titulado Pendiente
- El coeficiente de restitución e, en el control titulado Coef. restitución
- La velocidad inicial v0 con la que se lanza la pelota, en el control titulado Velocidad inicial
- En la dirección φ, ángulo que forma con el plano inclinado, en el control titulado Angulo
Se pulsa el botón titulado Nuevo
Se observa los sucesivos rebotes de la pelota en el plano inclinado.
En la parte superior, se proporcionan los datos de la posición y velocidad de la pelota en función del tiempo
Referencias
Physics challenges for teachers and students. Solutions to October 2004. The Physics Teacher, 42 (2004) pp. S2