Rebotes en un recinto circular
Cuando una pelota rebota sobre un tablero rígido, la componente de la velocidad perpendicular al tablero disminuye su valor, quedando la componente paralela inalterada
vx=ux
vy=-e·uy
o bien
vsinφ=usinθ
vcosφ=e·usinθ
Conocida la velocidad inicial u, el ángulo de incidencia θ y el coeficiente de restitución e, despejamos el ángulo φ y la velocidad de rebote v
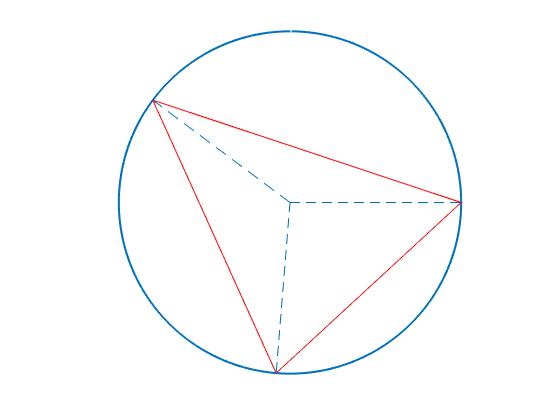
Polígono de tres lados, dos rebotes
La partícula sale de A con velocidad v, formando un ángulo θ con la dirección radial, choca con el recinto circular en B, en el que se cumple que
La partícula sale de B con velocidad v1 haciendo un ángulo θ1 con la dirección radial y choca con el recinto circular en C, se cumple que
Como e<1 entonces θ2>θ1>θ
Para que la partícula retorne a A y se cierre la trayectoria se tendrá que cumplir que la suma de los ángulos interiores del triángulo sea 180°
2θ+2θ1+2θ2=π
Dado el coeficiente de restitución e, despejamos el ángulo θ que hace que la trayectoria sea cerrada en forma de triángulo
n=2; %número de choques, polígono de n+1 lados
e=0.6; %coeficiente de restitución
th_0=atan(1/sqrt(1/e+1/e^2+1/e^3));
hold on
fplot(@(t) cos(t), @(t) sin(t),[0,2*pi], 'lineWidth',1.5)
ang=0;
for k=0:n
th=atan(tan(th_0)/e^k);
line([0,cos(ang)],[0,sin(ang)], 'lineStyle','--')
line([cos(ang),cos(ang+pi-2*th)],[sin(ang),sin(ang+pi-2*th)],'color','r')
ang=ang+pi-2*th;
end
hold off
grid on
axis equal
axis off
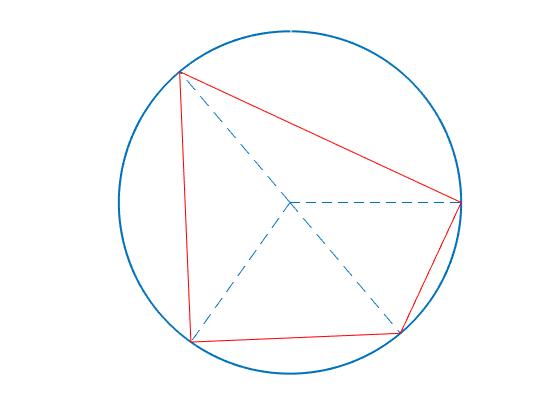
Polígono de cuatro lados, tres rebotes
La partícula sale de A con velocidad v, formando un ángulo θ con la dirección radial, choca con el recinto circular en B, en el que se cumple que
La partícula sale de B con velocidad v1 haciendo un ángulo θ1 con la dirección radial y choca con el recinto circular en C, se cumple que
La partícula sale de C con velocidad v2 haciendo un ángulo θ2 con la dirección radial y choca con el recinto circular en D, se cumple que
Como e<1 entonces θ3>θ2>θ1>θ
Para que la partícula retorne a A y se cierre la trayectoria se tendrá que cumplir que la suma de los ángulos interiores del cuadrilátero sea 360°
2θ+2θ1+2θ2+2θ3=2π
Dado el coeficiente de restitución e, despejamos el ángulo θ que hace que la trayectoria sea cerrada en forma de cuadrilátero
n=3; %número de choques, polígono de n+1 lados
e=0.6; %coeficiente de restitución
th_0=atan(e^(3/2));
hold on
fplot(@(t) cos(t), @(t) sin(t),[0,2*pi], 'lineWidth',1.5)
ang=0;
for k=0:n
th=atan(tan(th_0)/e^k);
line([0,cos(ang)],[0,sin(ang)], 'lineStyle','--')
line([cos(ang),cos(ang+pi-2*th)],[sin(ang),sin(ang+pi-2*th)],'color','r')
ang=ang+pi-2*th;
end
hold off
grid on
axis equal
axis off
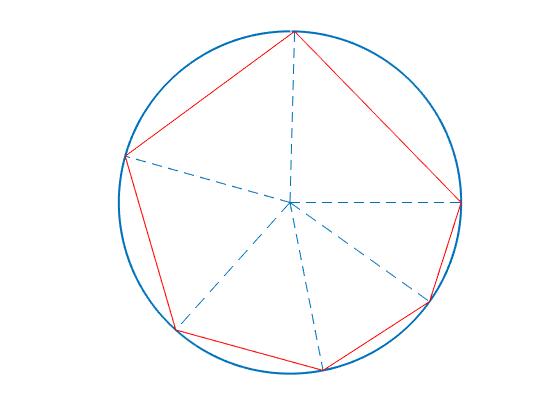
Polígono de n+1 lados, n rebotes
En general, para n colisiones de la partícula con el recinto circular
2θ+2θ1+2θ2+...+2θn=(n-1)π
Dado el coeficiente de restitución e, resolvemos la ecuación trascendente utilizando el la función
n=5; %número de choques, polígono de n+1 lados
e=0.8; %coeficiente de restitución
k=1:n;
f=@(x) x+sum(atan(tan(x)./e.^k))-(n-1)*pi/2;
th_0=fzero(f,[0,pi/2]);
hold on
fplot(@(t) cos(t), @(t) sin(t),[0,2*pi], 'lineWidth',1.5)
ang=0;
for k=0:n
th=atan(tan(th_0)/e^k);
line([0,cos(ang)],[0,sin(ang)], 'lineStyle','--')
line([cos(ang),cos(ang+pi-2*th)],[sin(ang),sin(ang+pi-2*th)],'color','r')
ang=ang+pi-2*th;
end
hold off
axis equal
axis off