

Potencial tabla de lavar (washboard)
Energía potencial
El disco tiene una masa md y un radio R. La varilla que gira solidariamente con el disco (en color rojo) tiene una masa M y una longitud L
A medida que el disco gira, la cuerda (inextensible y de masa despreciable) que sujeta al cuerpo de masa m se desenrolla
Cuando el sistema ha girado un ángulo θ su energía potencial ha cambiado, el centro de masas del la varilla se ha elevado y el cuerpo de masa m ha descendido Rθ
La variación de energía potencial es
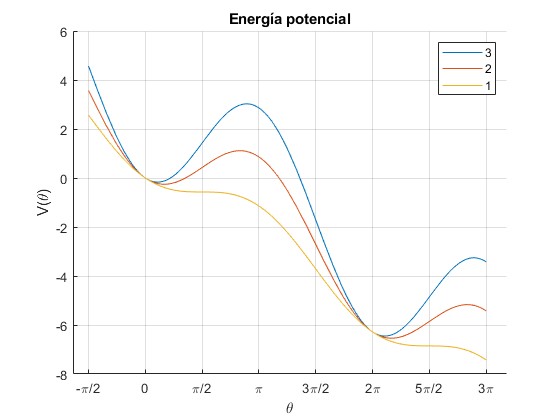
Definimos una energía potencial adimensional V(θ)
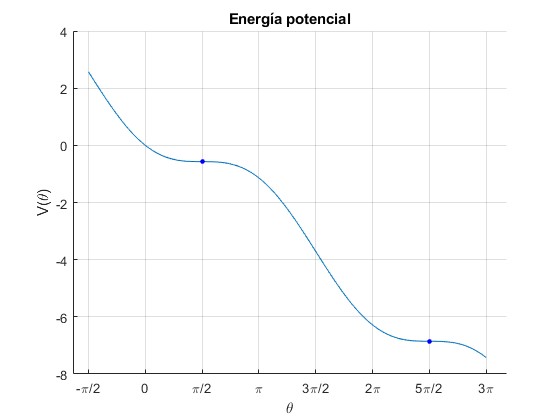
Representamos la función V(θ) para los valores del parámetro A=1, 2 y 3
hold on
for A=[3,2,1]
fplot(@(x) -x+A*(1-cos(x)),[-pi/2,3*pi],'displayName',num2str(A))
end
hold off
grid on
set(gca,'XTick',-pi/2:pi/2:3*pi)
set(gca,'XTickLabel',{'-\pi/2','0','\pi/2','\pi','3\pi/2','2\pi','5\pi/2','3\pi'})
legend('-DynamicLegend','location','northeast')
xlabel('\theta')
ylabel('V(\theta)')
title('Energía potencial')
Los extremos (máximos y mínimos) de esta función son
Los extremos son máximos, cuando la derivada segunda es negativa y son mínimos, cuando la derivada segunda es positiva.
Llamando θ0=arcsin(1/A), con A≥1.- Los mínimos se producen para θn=θ0+2nπ
- Los máximos para θn=π-θ0+2nπ
A=3;
f=@(x) -x+A*(1-cos(x));
hold on
fplot(f,[-pi/2,3*pi])
phi=asin(1/A);
for n=0:1
%mínimos
plot(phi+n*2*pi,f(phi+n*2*pi),'o','markersize',3,'markeredgecolor',
'r','markerfacecolor','r')
%máximos
plot((pi-phi)+n*2*pi,f(pi-phi+n*2*pi),'o','markersize',3,'markeredgecolor',
'b','markerfacecolor','b')
end
hold off
set(gca,'XTick',-pi/2:pi/2:3*pi)
set(gca,'XTickLabel',{'-\pi/2','0','\pi/2','\pi','3\pi/2','2\pi','5\pi/2','3\pi'})
grid on
xlabel('\theta')
ylabel('V(\theta)')
title('Energía potencial')
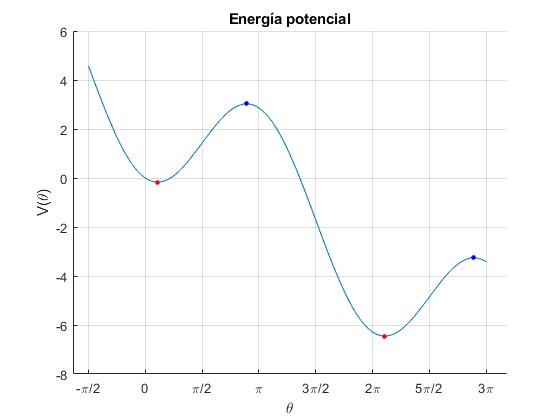
Para A=1, los mínimos y los máximos coinciden y dan lugar a los puntos de inflexión, aquellos en los que la derivada segunda es nula
Posibles movimientos
Supongamos que el parámetro A=4. Para una energía E=2. Calculamos las raíces de la ecuación transcendente utilizando la función
function washboard_4
E=2; %energía
A=4; %parámetro
fm=@(x) -x+A*(1-cos(x));
f=@(x) fm(x)-E;
x=linspace(-pi/2,3*pi,50);
r=raices(f,x);
hold on
fplot(fm,[-pi/2,3*pi])
line([-pi/2,3*pi],[E,E],'color','k')
line([r(1),r(2)],[-8,-8],'linewidth',1.5,'color','r')
line([r(3),3*pi],[-8,-8],'linewidth',1.5,'color','r')
line([r(1),r(1)],[-8,fm(r(1))],'lineStyle','--')
line([r(2),r(2)],[-8,fm(r(2))],'lineStyle','--')
line([r(3),r(3)],[-8,fm(r(3))],'lineStyle','--')
disp(r)
hold off
set(gca,'XTick',-pi/2:pi/2:3*pi)
set(gca,'XTickLabel',{'-\pi/2','0','\pi/2','\pi','3\pi/2','2\pi',
'5\pi/2','3\pi'})
grid on
xlabel('\theta')
ylabel('V(\theta)')
title('Energía potencial')
function r = raices(f, x)
y=f(x);
indices=find(y(1:end-1).*y(2:end)<0);
r=zeros(1,length(indices));
for k=1:length(indices)
r(k)=fzero(f, [x(indices(k)), x(indices(k)+1)]);
end
end
end
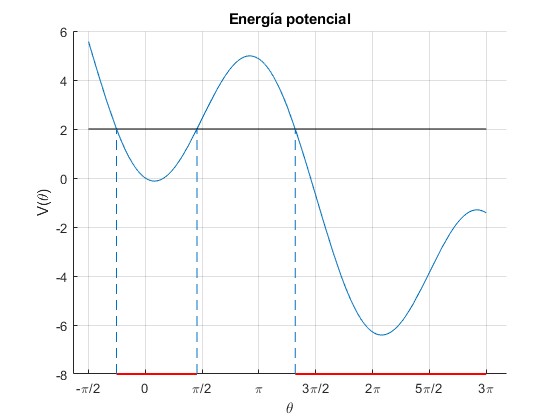
-0.7966 1.4271 4.1461
El dispositivo se puede mover en los posiciones θ señaladas por los segmentos de color rojo [-0.7966, 1.4271] y [4.1461,∞). En todas estas posiciones, la energía cinética es positiva, la energía total E es mayor o igual que la energía potencial V(θ)
Ecuación del movimiento
En la figura, se muestran las fuerzas sobre el dispositivo
La ecuación del movimiento del cuerpo de masa m es
El momento de inercia del conjunto formado por el disco y la varilla es
La ecuación de la dinámica de rotación es
La relación entre las aceleración angular α del disco y la aceleración a del cuerpo es
Eliminando la tensión T de la cuerda
El ángulo de equilibrio θ0 es aquél en el que la aceleración es nula
Fijados M, L (masa y longitud de la varilla) y R (radio del disco), la masa del cuerpo m ha de ser menor que
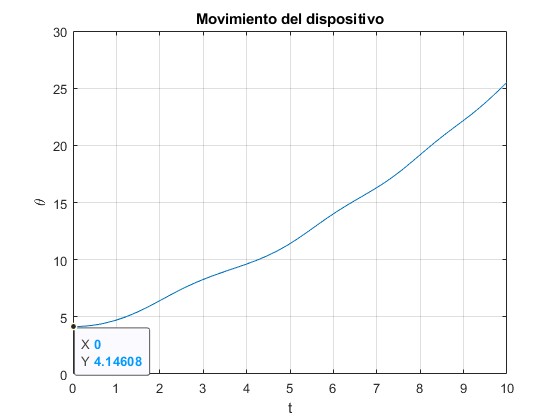
Resolvemos la ecuación diferencial del movimiento, por el procedimiento
Fijado el parámetro A=4, para la energía E=2, hemos visto los posibles movimientos del dispositivo estudiando la función energía potencial V(θ)
Supongamos que la partícula parte de
function washboard_5
E=2; %energía
A=4; %parámetro
fm=@(x) -x+A*(1-cos(x));
f=@(x) fm(x)-E;
x=linspace(-pi/2,3*pi,50);
r=raices(f,x);
f=@(t,x) [x(2); -(sin(x(1))-1/A)];
[t,x]=ode45(f,[0,10],[r(1),0]);
plot(t,x(:,1))
grid on
xlabel('t')
ylabel('\theta');
title('Movimiento del dispositivo')
function r = raices(f, x)
y=f(x);
indices=find(y(1:end-1).*y(2:end)<0);
r=zeros(1,length(indices));
for k=1:length(indices)
r(k)=fzero(f, [x(indices(k)), x(indices(k)+1)]);
end
end
end
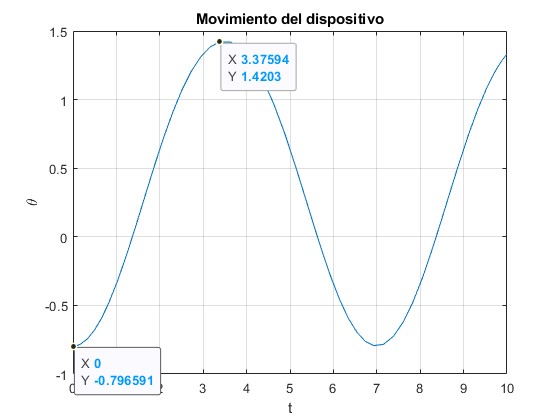
Como apreciamos en la gráfica, la partícula oscila entre las posiciones θ1=-07966 y θ2=1.4271
Si se cambia la posición inicial a
Si se cambia la posición inicial a
Actividades
Los datos del dispositivo son
- Masa del disco, md=0.36 kg
- Radio del disco, R=0.09 m
- Masa de la varilla, M=0.23 kg
- Longitud de la varilla, L=0.3 m
- Masa del cuerpo, m=0.1 a 0.3 kg
Se introduce
- El valor de la energía total E, en el control titulado Energía
- El valor dede la masa del cuerpo m, en el control titulado Masa. Este valor no puede superar el límite
Se pulsa el botón titulado Nuevo
El dispositivo permanece en la posición de equilibrio θ0
Se pulsa el botón titulado ►
El programa interactivo calcula las raíces de la ecuación transcendente E=V(θ).
Sitúa el dispositivo en cualquiera de las posiciones θ1, θ2 o θ3 determinada de forma aleatoria y lo suelta (parte del reposo)
Si solamente hay una raíz θ1, lo sitúa en esta posición
A continuación, resuelve la ecuación diferencial del movimiento por el procedimiento de Runge-Kutta, para calcular la posición angular θ en función del tiempo t.
A la izquierda, se muestran los datos de
- Tiempo, t
- La posición angular θ
- La velocidad angular, ω=dθ/dt
A la derecha, las raíces de la ecuación E=V(θ)
Referencias
M Fiolhais, B Golli, R Nogueira. Mechanical apparatus for the fold catastrophe demonstration. Eur. J. Phys 42 (2021) 045001