Un bloque desliza a lo largo de un plano inclinado y deforma un muelle (II)
Ecuaciones del movimiento
Para analizar el movimiento, situamos el eje X a lo largo del plano inclinado, con el origen en la posición del extremos libre del muelle sin deformar, la parte positiva apuntando hacia abajo. Las etapas del movimiento son las siguientes:
1.-El bloque baja deslizando por el plano inclinado
El bloque parte de la posición x0<0 y desliza hacia abajo si la componente del peso mg·sinθ es mayor que la fuerza de rozamiento máxima, μs·mg·cosθ, en caso contrario, permanecerá en reposo en la posición inicial.
mgsinθ≥μs·mg·cosθ
El ángulo θ del plano inclinado para que el bloque deslice tiene valer tanθ≥μs
Supongamos que se cumple esta condición y el bloque desliza hacia abajo. Las fuerzas sobre el bloque son:
- El peso mg
- La reacción del plano N=mg·cosθ
- La fuerza de rozamiento, de sentido contrario a la velocidad del bloque fr=μk·N
La aceleración constante es
a+=g(sinθ-μcosθ)
La posición x y velocidad v en función del tiempo es
Llega al origen en el instante t con velocidad v0.
2.-El bloque en contacto con el muelle, desliza hacia abajo
Las fuerzas sobre el bloque son:
- El peso mg
- La reacción del plano N=mg·cosθ
- La fuerza que ejerce el muelle deformado x, k·x
-
La fuerza de rozamiento, de sentido contrario a la velocidad del bloque, fr=μk·N
Cuando el bloque se mueve hacia abajo (v>0), la ecuación del movimiento es
ma=-kx+mgsinθ-μkmgcosθ
ma=-kx+ma+
Escribimos la ecuación del movimiento en forma de ecuación diferencial
con ω2=k/m
Esta ecuación del movimiento nos recuerda la ecuación diferencial de un MAS, pero además tiene un término adicional a+
La solución de la ecuación diferencial es la suma de la homogénea (la ecuación de un MAS) más una constante C. Introduciendo la solución particular (la constante C) en la ecuación diferencial
ω2C= a+ C=a+ /ω2
La solución completa de la ecuación diferencial es
La velocidad del bloque es
Los coeficientes A y B se determinan a partir de las condiciones iniciales
Ponemos el contador de tiempo parcial a cero t=0, el bloque llega al origen x=0, con velocidad v0.
La posición x y la velocidad v del bloque en su movimiento a lo largo del plano inclinado, hacia abajo, es
El máximo desplazamiento xm se produce cuando la velocidad es nula v=0, en el instante t tal que
Teniendo en cuenta las relaciones
y que en el segundo cuadrante, el seno es positivo y el coseno es negativo. Llegamos después de algunas operaciones a la expresión para el máximo desplazamiento xm
3.-El bloque en contacto con el muelle, desliza hacia arriba
El móvil parte de xm con velocidad inicial nula siempre que se cumpla que
kxm-mgsinθ ≥ μsmgcosθ,
ω2xm≥a-
en caso contrario la posición xm será la posición final del bloque.
Supongamos que se cumple la primera condición.
Cuando el bloque se desliza a lo largo del plano inclinado, hacia arriba (v<0), la fuerza de rozamiento cambia de sentido y la ecuación del movimiento es
ma=-kx +mgsinθ+μkmgcosθ
ma=-kx+ma-
Escribimos la ecuación del movimiento en forma de ecuación diferencial
La solución completa de la ecuación diferencial es
Ponemos el contador de tiempo parcial t a cero, el bloque parte de la posición xm con velocidad nula, las constantes A y B de la ecuación de la posición valen
La posición x y la velocidad v de dicho cuerpo en su movimiento a lo largo del plano inclinado, hacia arriba, son
Cuando el móvil pasa por el origen x=0,
- Pasa por el origen
- No pasa por el origen
Como |cos(ωt)|≤1 se tiene que cumplir que ω2xm≥2a-.para pasar por el origen, en el instante t tal que
La velocidad vf que lleva al pasar por el origen x=0 es
Como el radicando no puede ser negativo se tiene que cumplir que ω2xm≥2a-
A continuación, el bloque continúa ascendiendo por el plano inclinado, x<0 sin estar en contacto con el muelle
En el caso que ω2xm<2a- el móvil se para antes de llegar al origen, en el instante t en el que v=0 ó sin(ωt)=0, ωt=π. El móvil se para en la posición
En este instante, se completa un ciclo del movimiento del bloque. Puede ocurrir que se pare definitivamente, o descienda por el plano inclinado x>0, tal como analizaremos más adelante
4.-El bloque desliza hacia arriba, x<0
Las fuerzas sobre el bloque son:
- El peso mg
- La reacción del plano N=mg·cosθ
- La fuerza de rozamiento, fr=μk·N
La aceleración constante es
a-=g(sinθ+μcosθ)
El movimiento es rectilíneo, uniformemente acelerado. De nuevo ponemos el contador de tiempo parcial a cero.
v=vf+a-t
x=vf·t+a-t2/2
Como vf<0, y a->0 el bloque se para cuando v=0, en la posición
se completa un ciclo, se vuelve a repetir el movimiento tomando esta posición inicial de partida.
4.-El bloque en contacto con el muelle, desliza hacia abajo
Volverá a deslizar a lo largo del plano inclinado, hacia abajo, si
mgsinθ-kx1≥μk·mgcosθ,
ω2x1≤a+.
La solución de la ecuación del movimiento para v>0 es
Ponemos el contador de tiempo parcial a cero. Las condiciones iniciales son t=0, x=x1y v=0,
La máxima deformación del muelle, se alcanzará cuando v=0, es decir, en el instante t tal que sin(ωt)=0, ωt=π. El móvil se detiene en la posición
El móvil parte de x2 con velocidad inicial nula siempre que se cumpla que
kx2-mgsinθ ≥ μsmgcosθ,
ω2x2≤a-.
en caso contrario la posición x2 será la posición final del bloque en reposo.
Supongamos que se cumple la primera condición. Ponemos el contador de tiempo parcial a cero. Las condiciones iniciales son t=0, x=x2, v=0, Tomamos las ecuaciones del movimiento del bloque en contacto con el muelle, hacia arriba. Después de un tiempo t tal que ωt=π. El móvil se para en la posición
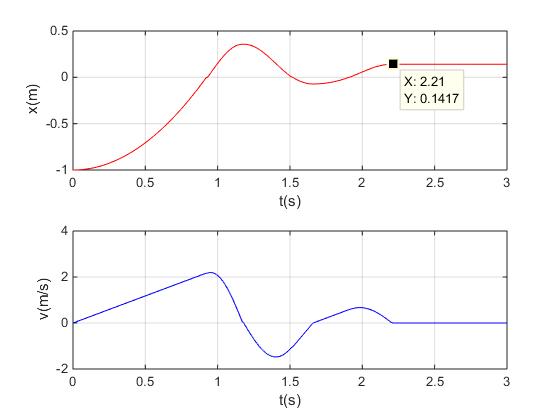
y así, sucesivamente, hasta que se detiene en una posición xi>0
Creamos un script con MATLAB para representar la posición x y velocidad v del bloque en función del tiempo
mu=0.3; %coeficiente de rozamiento
m=1; %masa del bloque
angulo=pi/6; %ángulo del plano inclinado
k=50; %constante del muelle
x0=-1; %posición inicial
g=9.8; %aceleración de la gravedad
w=sqrt(k/m);
tipo=0;
%aceleraciones
aMas=g*(sin(angulo)-mu*cos(angulo));
aMenos=g*(sin(angulo)+mu*cos(angulo));
t=0; %%tiempo parcial
xBloque=x0; %posición del bloque
vBloque=0; %velocidad del bloque
A=0; B=0; vFinal=0; %variables auxiliares
dt=0.01;
tt=0:dt:3; %tiempo total
x=zeros(1,length(tt));
v=zeros(1,length(tt));
if mu>tan(angulo)
x=x+x0;
else
for i=1:length(tt)
switch tipo
case 0
xBloque=x0+aMas*t^2/2;
vBloque=aMas*t;
if t>sqrt(-2*x0/aMas)
xBloque=0;
vBloque=sqrt(-2*x0*aMas);
A=vBloque/w;
B=-aMas/w^2;
tipo=1;
t=0;
end
case 1
xBloque=A*sin(w*t)+B*cos(w*t)+aMas/w^2;
vBloque=A*w*cos(w*t)-B*w*sin(w*t);
if vBloque<0.0
t=(pi-atan(-A/B))/w;
vBloque=0;
xBloque=A*sin(w*t)+B*cos(w*t)+aMas/w^2;
x0=xBloque; %máximo desplazamiento
B=xBloque-aMenos/w^2;
A=0;
t=0;
tipo=2;
if (w^2*xBloque)<aMenos %queda quieto
tipo=4;
end
if xBloque>1 %comprime completamente el muelle
xBloque=1;
vBloque=0;
tipo=4;
end
end
case 2
xBloque=B*cos(w*t)+aMenos/w^2;
vBloque=-B*w*sin(w*t);
if vBloque>0.0
t=pi/w;
xBloque=B*cos(w*t)+aMenos/w^2;
vBloque=0.0;
t=0;
tipo=4;
if (w^2*xBloque)<aMas
A=0;
B=xBloque-aMas/w^2;
tipo=1;
end
end
if xBloque<0 %el bloque pasa por el origen
t=(pi-acos(aMenos/(w^2*x0-aMenos)))/w;
xBloque=0.0;
vBloque=-B*w*sin(w*t);
vFinal=vBloque;
t=0.0;
tipo=3;
end
case 3
xMuelle=0.0;
xBloque=vFinal*t+aMenos*t^2/2;
vBloque=vFinal+aMenos*t;
if vBloque>0
x0=xBloque;
vBloque=0;
tipo=0;
t=0.0;
end
case 4
otherwise
break;
end
x(i)=xBloque;
v(i)=vBloque;
t=t+dt;
end
end
subplot(2,1,1)
plot(tt,x, 'red')
grid on
xlabel('t(s)')
ylabel('x(m)')
subplot(2,1,2)
plot(tt,v,'blue')
grid on
xlabel('t(s)')
ylabel('v(m/s)')