

Equilibrio y estabilidad.
El sistema consiste en una partícula de masa m que se mueve a lo largo de una circunferencia de radio R sin rozamiento. La partícula está unida al extremo de un muelle de constante k, el otro extremo se fija en la posición (0, R/2) tal como se muestra en la figura.
La energía potencial de la partícula se compone de dos términos:
- La energía potencial gravitatoria, mg(R-R·cosθ)
- La energía potencial elástica, debida a la deformación del muelle
La longitud l del muelle deformado es
Como la longitud del muelle sin deformar es R/2, la energía potencial debida a ambas fuerzas conservativas es
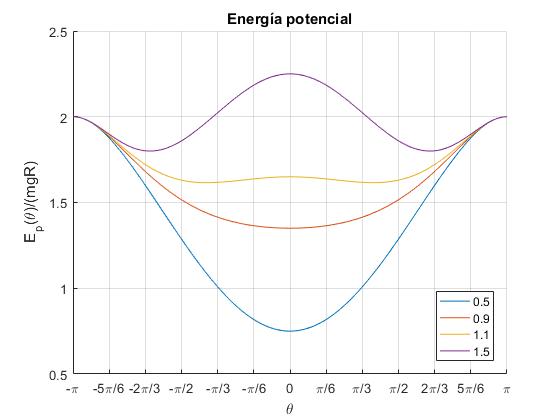
Representamos la energía potencial Ep(θ) para varios valores del parámetro α: 0.5, 0.9, 1.1 y 1.5. La energía potencial presenta un mínimo para θ=0 cuando α<1 y dos mínimos simétricos ±θe para α>1, tal como analizaremos en el siguiente apartado
hold on
for alfa=[0.5,0.9,1.1,1.5]
f=@(x) 1-cos(x)+3*alfa*(sqrt(5+4*cos(x))-1).^2/8;
fplot(f,[-pi,pi])
end
set(gca,'XTick',-pi:pi/6:pi)
set(gca,'XTickLabel',{'-\pi','-5\pi/6','-2\pi/3','-\pi/2','-\pi/3',
'-\pi/6', '0','\pi/6','\pi/3','\pi/2','2\pi/3','5\pi/6','\pi'})
hold off
grid on
ylim([0.5,2.5])
xlim([-pi,pi])
legend('0.5','0.9','1.1','1.5', 'location','southeast')
ylabel('E_p(\theta)/(mgR)')
xlabel('\theta')
title('Energía potencial')
Posiciones de equilibrio
La fuerza tangencial que actúa sobre la partícula es
Las posiciones de equilibrio se obtienen cuando F(θ)=0
θ=0, θ=±π y el ángulo ±θe tal que
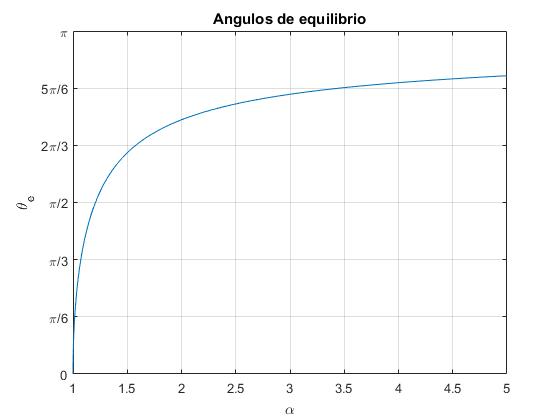
Como -1≤cosθ≤1, el valor mínimo del miembro de la izquierda es 1 y el valor máximo 3. Este valor máximo se obtiene para α=1 y el valor mínimo para α=∞
Representamos el ángulo θe en función del parámetro α. Vémos que el ángulo θe crece rápidamente con α, para tender al valor límite π cuando α→∞
f=@(x) acos((-9*x.^2+15*x-5)./(3*x-2).^2);
fplot(f,[1,5])
set(gca,'YTick',0:pi/6:pi)
set(gca,'YTickLabel',{'0','\pi/6','\pi/3','\pi/2','2\pi/3','5\pi/6','\pi'})
grid on
ylim([0,pi])
xlabel('\alpha')
ylabel('\theta_e')
title('Angulos de equilibrio')
Estabilidad
Calculamos la derivada segunda de la energía potencial
Para θ=0
Para θ=π
- Para θ=±θe
La derivada segunda es positiva (mínimo o equilibrio estable) si α<1 y negativa (máximo o equilibrio inestable) si α>1
La derivada segunda es negativa, por lo que la posición de equilibrio es inestable
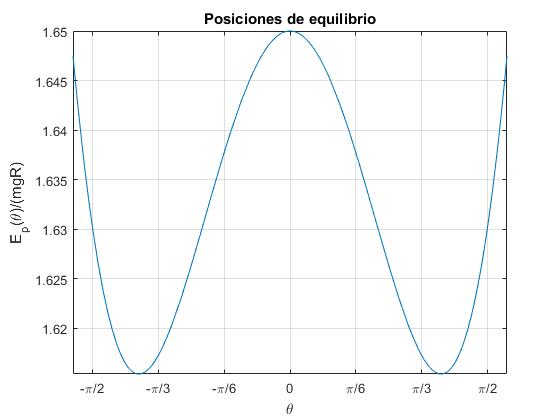
Representamos la energía potencial Ep(θ) para el valor del parámetro α=1.1. La energía potencial presenta mínimos para θ=±θe cuando α>1
alfa=1.1;
th_e=acos((-9*alfa^2+15*alfa-5)/(3*alfa-2)^2);
f=@(x) 1-cos(x)+3*alfa*(sqrt(5+4*cos(x))-1).^2/8;
fplot(f,[-th_e-pi/6,th_e+pi/6])
grid on
set(gca,'XTick',-pi:pi/6:pi)
set(gca,'XTickLabel',{'-\pi','-5\pi/6','-2\pi/3','-\pi/2','-\pi/3',
'-\pi/6', '0','\pi/6','\pi/3','\pi/2','2\pi/3','5\pi/6','\pi'})
ylabel('E_p(\theta)/(mgR)')
xlabel('\theta')
title('Posiciones de equilibrio')
Esta función es positiva para α>1, por lo que ±θe son posiciones de equilibrio estable
Movimiento de la partícula
Deducimos las ecuaciones del movimiento de la partícula alrededor de una posición de equilibrio estable
La partícula se mueve a lo largo de una circunferencia de radio R, su energía cinética es
La lagrangiana L=Ek-Ep
La ecuación del movimiento
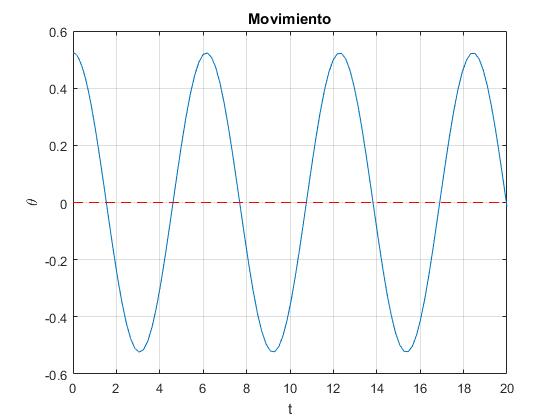
Resolvemos la ecuación del movimiento por procedimientos numéricos con las siguientes condiciones iniciales: en el instante t=0, el móvil parte de la posición θ0, en reposo, dθ/dt=0
- α<1. La línea a trazos marca la posición de equilibrio estable
alfa=0.9;
R=1;
x0=[pi/6,0];
f=@(t,x) [x(2);-9.8*(1-3*alfa*(1-1/sqrt(5+4*cos(x(1))))/2)*sin(x(1))/R];
[t,x]=ode45(f,[0,20],x0);
plot(t,x(:,1))
line([0,20],[0,0],'lineStyle','--','color','r')
grid on
xlabel('t')
ylabel('\theta')
title('Movimiento')
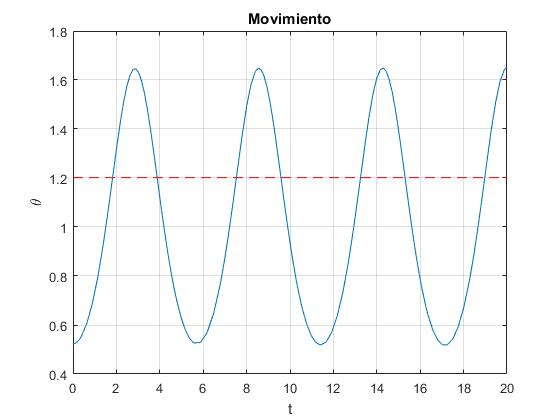
alfa=1.1;
th_e=acos((-9*alfa^2+15*alfa-5)/(3*alfa-2)^2);
R=1;
x0=[pi/6,0];
f=@(t,x) [x(2);-9.8*(1-3*alfa*(1-1/sqrt(5+4*cos(x(1))))/2)*sin(x(1))/R];
[t,x]=ode45(f,[0,20],x0);
plot(t,x(:,1))
line([0,20],[th_e,th_e],'lineStyle','--','color','r')
grid on
xlabel('t')
ylabel('\theta')
title('Movimiento')
Comprobamos que la energía total permanece constante
>> E=(R*x(:,2)).^2/2+9.8*R*(1-cos(x(:,1)) +3*alfa*(sqrt(5+4*cos(x(:,1)))-1).^2/8) E = 16.0498 16.0498 ....
Actividades
En el programa interactivo se han fijado los valores de:
- La masa de la partícula m=1 kg
-
El radio de la circunferencia R=0.5 m
Se introduce
- El valor del parámetro α en el control titulado Parámetro α.
- la posición inicial θ0 de partida del móvil con velocidad dθ/dt=0
Se pulsa el botón titulado Nuevo.
- Si α<1 la posición de equilibrio es θe=0
- Si α>1, el programa interactivo calcula el ángulo de equilibrio θe, señalado por una línea de color rojo
A la izquierda, se proporciona los datos del tiempo t y la posición θ de la partícula. A la derecha, se representa la energía potencial Ep(θ) y se proporcionan los datos de la energía total de la partícula que deberá permanecer constante y del ángulo de equilibrio θe.
Referencias
Drugowich J. R., Hipólito O. Spontaneous symmetry breaking in a simple mechanical model. Am. J. Phys. 53 (7) July 1985, pp. 690-693
O.L. de Lange, J. Pierrus. Solved Problems in Classical Mechanics. Analytical and numerical solutions with comments. Oxford University Press (2010). Questions 13.14, 13.15, pp. 488-492