

Movimiento de una partícula atada a una cuerda que se enrolla en un cilindro horizontal (II).
Cuando la partícula de masa m cae, en el instante t la parte de la cuerda que está enrollada en el cilindro es la longitud Rφ del arco de una circunferencia de radio R. Describiremos el movimiento de la partícula en términos del ángulo φ.
Posición, velocidad y aceleración de la partícula
La posición de la partícula en el Sistema de Referencia de la figura es
Donde l=l0-Rφ
Derivamos con respecto del tiempo para obtener las componentes de la velocidad
Derivamos respecto del tiempo para obtener las componentes de la aceleración
Ecuación del movimiento
Las fuerzas que actúan sobre la partícula son:
- El peso, mg
- La tensión de la cuerda, T
Eliminamos la tensión T en el sistema de dos ecuaciones, multiplicando la primera por sinφ, la segunda por cosφ y sumando
Despejamos la tensión T/m de la cuerda
Conservación de la energía
Ponemos el nivel cero de energía potencial en el origen.
La energía inicial de la partícula es E0=mgR
La energía de la partícula en cualquier instante es
La energía permanece constante, E=E0=mgR
Tensión de la cuerda
La tensión T de la cuerda es una función del ángulo φ.
La tensión de la cuerda se anula cuando
Se resuelve por procedimientos numéricos esta ecuación trascendente.
La cuerda alcanzará la tensión nula siempre que no se enrolle completamente, es decir, Rφ<l0. El primer término de la igualdad ha de ser negativo, por lo que se tiene que igualar a la rama negativa de tan(φ/2), es decir, el ángulo 180<φ<360, tal como se aprecia en la figura.
En la figura, representamos la recta y=(3/2)(φ-l0/R) y la función y=tan(φ/2) para l0=6 m y R=1 m.
Denominamos longitud crítica de la cuerda lc a aquella que se enrolla completamente en el cilindro y a la vez, alcanza la tensión cero en el punto de contacto de la partícula.
Como vemos en la figura, la recta y=(3/2)(φ-l0/R) y la función y=tan(φ/2) se cortan en el punto de tangencia. En el punto de corte la pendiente de la función es 3/2.
Introducimos el valor del ángulo φ en la ecuación trascendente y despejamos el cociente l/R.
- Cuando la longitud l0 de la cuerda es menor que lc la cuerda se enrolla completamente en el cilindro
- Cuando la longitud l0 de la cuerda es mayor que lc la cuerda alcanza la tensión T=0
Se utiliza la función
Definimos la función
function enrolla
L=6; %longitud de la cuerda
R=1; %radio
%calcula el ángulo límite, T=0
if L>5.315
g=@(x) 3*(L-x)/2+tan(x/2);
xb=buscar_intervalos(g,pi+0.1,2*pi,50);
aLimite=fzero(g,[xb(1,1),xb(1,2)]);
end
%resuelve la ecuación diferencial
f=@(t,x) [x(2); (9.8*cos(x(1))/R+x(2)^2)*R/(L-x(1))];
opts=odeset('events',@(t,x) stop_enrolla(t,x,aLimite));
[~,x]=ode45(f,[0,3],[0,0],opts);
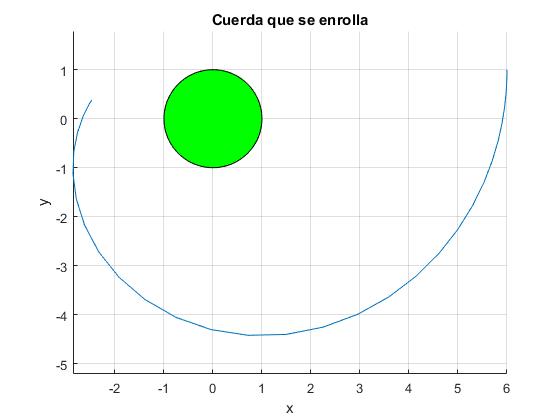
xp=R*sin(x(:,1))+(L-R*x(:,1)).*cos(x(:,1));
yp=R*cos(x(:,1))-(L-R*x(:,1)).*sin(x(:,1));
hold on
%dibuja el cilindro
z=0:pi/40:2*pi;
fill(R*sin(z),R*cos(z),'g')
%dibuja la trayectoria de la partícula
plot(xp,yp)
hold off
grid on
axis equal
xlabel('x')
ylabel('y');
title('Cuerda que se enrolla')
function xb = buscar_intervalos(f,a,b,n)
x = linspace(a,b,n);
j = 0;
xb=[];
for i = 1:length(x)-1
if sign(f(x(i))) ~= sign(f(x(i+1)))
j = j + 1;
xb(j,1) = x(i);
xb(j,2) = x(i+1);
end
end
if isempty(xb)
disp('no se han encontrado cambios de signo')
else
disp(['número de intervalos:' int2str(j)])
end
end
function [value,isterminal,direction]=stop_enrolla(~,x,xFin)
value=x(1)-xFin;
isterminal=1;
direction=0;
end
end
Comprobamos la conservación de la energía. La energía inicial es mgR
>> E=((L-R*x(:,1)).^2).*x(:,2).^2/2-9.8*((L-R*x(:,1)).*
sin(x(:,1))-R*cos(x(:,1)))
E = 9.8000
9.8000
......
9.7960
9.7960
Tiro parabólico
Cuando la cuerda alcanza la tensión cero, supondremos que la partícula se mueve bajo la acción del peso, describiendo un tiro parabólico.
Se calcula el ángulo límite φ cuando la tensión es nula. La posición inicial x0, y0 de la partícula en ese instante es.
Se calculan las componentes de la velocidad en dicho instante
Las ecuaciones del movimiento de la partícula bajo la acción de su propio peso son:
Actividades
Se introduce
- La longitud l0 de la cuerda, en el control titulado Longitud cuerda
- Se ha fijado el radio del cilindro en R=1 m
Se pulsa el botón titulado Nuevo
Observamos el movimiento de la partícula hasta que:
- la cuerda se enrolla completamente en el cilindro
- la cuerda alcanza la tensión cero.
En el segundo caso, a partir de dicho instante, la partícula descibe un tiro parabólico
El programa calcula en cada instante el tanto por ciento de error relativo en la energía o el cociente
donde E es la energía en cualquier instante t y E0=mgR es la energía inicial.
Deducción alternativa en coordenadas polares
Para describir el movimiento de la partícula adoptamos el sistema de referencia que se muestra en la figura
Expresamos la velocidad y aceleración en coordenadas polares, véase el final de la página Movimiento de dos bloques atados por una cuerda
Ecuaciones de la dinámica
Las fuerzas que actúan sobre la partícula son:
- El peso, mg
- La tensión de la cuerda, T
Las ecuaciones del movimiento en la dirección radial y en la dirección son, respectivamente
Donde sinδ=R/r y cosδ=(l-Rφ)/r
Despejamos la tensión T de la segunda ecuación y la sustituimos en la primera
Esta es la ecuación diferencial del movimiento de la partícula en términos de r y θ y el ángulo φ que como veremos se simplifica notablemente al expresarla únicamente en términos de la variable φ.
El arduo trabajo algebraico consiste en expresar r y θ y sus derivadas en términos del ángulo φ y sus derivadas.
Como vemos en la figura
Expresamos la derivada con respecto del tiempo t de r en términos de φ y su derivada.
Expresamos la derivada con respecto del tiempo t de θ en términos de φ y su derivada.
Teniendo en cuenta que 1/cos2θ=1+tan2θ, llegamos a la expresión
A continuación, las derivadas segundas
Las componentes de la aceleración
Finalmente, expresamos la tensión de la cuerda y la ecuación del movimiento en términos del ángulo φ y sus derivadas.
Resolvemos la ecuación diferencial por procedimientos numéricos con las siguientes condiciones iniciales: en el instante t=0, φ=0, dφ/dt=0.
Una vez que conocemos el ángulo φ en función del tiempo, las coordenadas polares r y θ de la partícula se calculan del siguiente modo.
A continuación, la abscisa x y la ordenada y de la partícula
x=r·cosθ
y=r·sinθ
Conservación de la energía
Ponemos el nivel cero de energía potencial en el origen.
La energía inicial de la partícula es Ei=mgR
La energía final de la partícula es
Expresamos r, θ y sus derivadas en términos de φ y sus derivadas
function enrolla_1
L=6; %longitud de la cuerda
R=1; %Radio
%calcula el ángulo límite
if L>5.315
g=@(x) 3*(L-x)/2+tan(x/2);
xb=buscar_intervalos(g,pi+0.1,2*pi,50);
aLimite=fzero(g,[xb(1,1),xb(1,2)]);
end
%resuelve la ecuación diferencial
f=@(t,x) [x(2); (9.8*cos(x(1))/R+x(2)^2)*R/(L-x(1))];
opts=odeset('events',@(t,x) stop_enrolla(t,x,aLimite));
[~,x]=ode45(f,[0,3],[0,0],opts);
%coordenadas polares
r=sqrt((L-x(:,1)).^2+R^2);
angulo=atan2((L-R*x(:,1)).*sin(x(:,1))-R*cos(x(:,1)),
(L-R*x(:,1)).*cos(x(:,1))+R*sin(x(:,1)));
%coordenadas rectangulares
xp=r.*cos(angulo);
yp=-r.*sin(angulo);
hold on
%dibuja el cilindro
z=0:pi/40:2*pi;
fill(sin(z),cos(z),'g')
%dibuja la trayectoria de la partícula
plot(xp,yp)
hold off
grid on
axis equal
xlabel('x')
ylabel('y');
title('Cuerda que se enrolla')
function xb = buscar_intervalos(f,a,b,n)
x = linspace(a,b,n);
j = 0;
xb=[];
for i = 1:length(x)-1
if sign(f(x(i))) ~= sign(f(x(i+1)))
j = j + 1;
xb(j,1) = x(i);
xb(j,2) = x(i+1);
end
end
if isempty(xb)
disp('no se han encontrado cambios de signo')
else
disp(['número de intervalos:' int2str(j)])
end
end
function [value,isterminal,direction]=stop_enrolla(~,x,xFin)
value=x(1)-xFin;
isterminal=1;
direction=0;
end
end
Obtenemos la misma figura
Oscilaciones
Cuando la cuerda no se enrolla completamente y no alcanza la tensión T=0, la partícula de masa m, unida a la cuerda que parte de ángulo φ0>0, oscila
Se resuelve la ecuación diferencial
con las condiciones iniciales, φ=φ0, dφ/dt=0.
Se introduce
- La longitud l0 de la cuerda, en el control titulado Longitud cuerda
- El ángulo inicial φ0 en grados, en el control titulado Angulo cuerda
- Se ha fijado el radio del cilindro en R=1 m
Se pulsa el botón titulado Nuevo
Se observa una oscilación completa del péndulo
Referencias
Theoretical Question 1. A swing with a Falling Weight. IPHO problems and solutions. 2003 Taiwan
Kirk T. McDonald. A Pendulum Problem. October 2025