

Una demostración mecánica sorprendente
A. R. Marlow describe una sorprendente demostración mecánica en un artículo publicado en American Journal of Physics en el año 1991 originalmente publicada en 1926 en una revista para magos.
Los materiales necesarios son muy simples: una caja de cerillas, un manojo de llaves, un trozo de cuerda y un lápiz. Con una mano se sujeta el lápiz y se le rodea con la cuerda de modo que las llaves cuelgan de un extremo. Con la otra mano se sujeta la caja de cerillas unida al otro extremo de la cuerda, la cuerda se mantiene tensa horizontal un poco por debajo del nivel del lápiz. Después suelta, y aquí viene la sorpresa, el manojo de llaves mucho más pasado que la caja de cerillas se detiene mientras la cuerda da vueltas alrededor del lápiz que se mantiene fijo.
Una demostración espectacular por lo grandiosa, fué emitida en horario de máxima audiencia en el programa el Hormiguero de Antena 3 TV. En YouTube se pueden encontrar varios vídeos

Vamos a estudiar el sistema formado por una partícula de masa m y un cuerpo que cuelga de masa M mucho mayor. Ambos están unidos por una cuerda inextensible y de masa despreciable de longitud l0 que pasa por una varilla horizontal de forma cilíndrica de radio R, bien sujeta.
La cuerda puede deslizar sobre la varilla, la fuerza de rozamiento, que depende del ángulo de contacto, π/2+φ, hace que las tensiones de la cuerda a ambos lados de la varilla sean diferentes tal como se ha explicado en la página titulada Rozamiento de la cuerda sobre una polea. Cuando desliza
Posición, velocidad y aceleración de la partícula
Sea , la longitud de la porción de cuerda que une la partícula y la varilla y que es tangente a la misma
La posición de la partícula en el Sistema de Referencia de la figura es
Derivamos con respecto del tiempo para obtener las componentes de la velocidad
Derivamos respecto del tiempo para obtener las componentes de la aceleración
La posición del cuerpo de masa M es -h
Ecuaciones del movimiento
El movimiento de este sistema tiene dos o más etapas etapas:
El cuerpo de masa M, parte del reposo a la altura del eje de la varilla, se desplaza una altura h hasta que vuelve a detenerse
El cuerpo permanece en reposo y la partícula continua dando vueltas alrededor de la varilla. Una situación similar a la estudiada en la página titulada Movimiento de una partícula atada a una cuerda que se enrolla en un cilindro horizontal (II)
Cuando la masa del cuerpo M es grande y la masa de la partícula m es pequeña el movimiento consta esencialmente de dos etapas. A medida que la partícula da vueltas alrededor de la varilla, se incrementa la tensión de la cuerda T1, cuando supera un valor crítico, el cuerpo comienza a ascender
-
Ecuación del movimiento de la partícula
Ecuación del movimiento del cuerpo
Relación entre las tensiones T1 y T2
El cuerpo desciende
Las tensiones iniciales de la cuerda son T2=Mg y T1=mgsinφ0. φ0 es el ángulo que forma la cuerda con la horizontal en la situación inicial t=0.
La cuerda desliza sobre la varilla si , μs es el coeficiente estático
Sobre la partícula de masa m actúan dos fuerzas, la tensión T1 de la cuerda y el peso mg
Sobre el cuerpo de masa M actúan dos fuerzas, la tensión T2 de la cuerda y el peso Mg
Cuando el cuerpo de masa M se desplaza hacia abajo, la cuerda desliza sobre la varilla cilíndrica y la relación entre las tensiones es
Donde μk es el coeficiente cinético y π/2+φ es el ángulo de contacto entre la cuerda y la superficie cilíndrica de radio R
La tarea consiste en expresar las ecuaciones del movimiento en términos de dos variables l y φ. Resolveremos mediante procedimientros numéricos el sistema de dos ecuaciones diferenciales con las condiciones iniciales especificadas
Expresamos la aceleración del cuerpo de masa M, d2h/dt2 en términos de l y φ
Las ecuaciones del movimiento son
Despejamos la tensión T1 de la última y la sustituimos en las dos primeras, quedando el sistema de dos ecuaciones diferenciales
Llamamos
El sistema se convierte en
Despejamos las derivadas segundas
Ejemplo
Consideremos el siguiente sistema
- Cociente de las masas, M/m=6.49
- Longitud de la cuerda, l0=0.44 m
- Radio de la varilla cilíndrica, R=0.0075 m
- Coeficiente cinético, μk=0.195
Condiciones iniciales
- Ángulo inicial, φ0=0.1765 (10.1°), por debajo de la horizontal
- La partícula se suelta, dφ/dt=0
- Altura inicial del cuerpo, h=0
- Longitud inicial l=l0-R(π/2+φ0) de la porción de cuerda que une la partícula y el cilindro y que es tangente al mismo
- Si el cuerpo se suelta, dh/dt=0, por lo que dl/dt=0
Primero, verificamos que la cuerda desliza sobre la varilla cilíndrica
A continuación, se resuelve el sistema de dos ecuaciones diferenciales por el procedimiento
function looping_2
M=6.49; %masa
th_0=0.1765; %ángulo inicial
L0=0.44; %longitud cuerda
mu=0.195; %coeficiente cinético
R=0.0075; %radio
if M<sin(th_0)*exp(mu*(pi/2+th_0)) %verifica si la cuerda desliza
disp([M,sin(th_0)*exp(mu*(pi/2+th_0))])
return;
end
opts=odeset('events',@stop_cuerda);
[t,x]=ode45(@cuerda,[0,5],[L0-R*(pi/2+th_0),0,th_0,0], opts);
X=R*sin(x(:,3))+x(:,1).*cos(x(:,3));
Y=R*cos(x(:,3))-x(:,1).*sin(x(:,3));
hold on
plot(X,Y)
%dibuja el cilindro
z=0:pi/40:2*pi;
fill(R*sin(z),R*cos(z),[0.8 0.8 0.8])
fplot(@(z) R*cos(z), @(z) R*sin(z), [-x(end,3),pi],'lineWidth',
1.5,'color','k')
h=L0-x(end,1)-R*(x(end,3)+pi/2); %altura del cuerpo
line([-R,-R],[0,-h], 'lineWidth',1.5,'color','k')
plot(-R,-h,'ro','markersize',7,'markeredgecolor','r',
'markerfacecolor','r')
line([R*sin(x(end,3)),X(end)],[R*cos(x(end,3)), Y(end)],
'lineWidth',1.5,'color','k')
plot(X(end),Y(end),'bo','markersize',4,'markeredgecolor','b',
'markerfacecolor','b')
hold off
disp([t(end),x(end,1),x(end,2), x(end,3),x(end,4), X(end), Y(end)])
grid on
axis equal
xlabel('x')
ylabel('y');
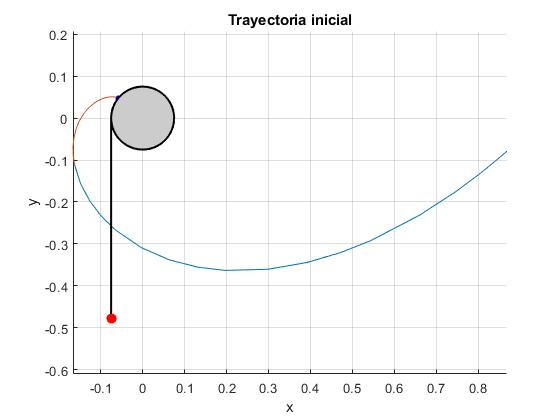
title('Trayectoria inicial')
% x(1) es l, x(3) es phi
function dr=cuerda(~, x)
xi=M*exp(-mu*(x(3)+pi/2));
a1=(xi+1)*R*cos(x(3))-x(1)*sin(x(3));
a2=(xi+1)*R*sin(x(3))+x(1)*cos(x(3));
b1=(xi+1)*cos(x(3));
b2=(xi+1)*sin(x(3));
c1=-xi*9.8*cos(x(3))+(R*sin(x(3))+x(1)*cos(x(3)))*x(4)^2+
2*sin(x(3))*x(4)*x(2);
c2=9.8-xi*9.8*sin(x(3))-(R*cos(x(3))-x(1)*sin(x(3)))*x(4)^2-
2*cos(x(3))*x(4)*x(2);
den=a1*b2-a2*b1;
dr=[x(2);(a1*c2-a2*c1)/den;x(4);(c1*b2-c2*b1)/den];
end
function [value,isterminal,direction]=stop_cuerda(~,x)
dh=-R*x(4)-x(2); %velocidad de la masa M
value=dh;
isterminal=1; %1 detiene la integración cuando la velocidad se hace cero
direction=-1; % 1 crece, -1 decrece, 0 no importa
end
end
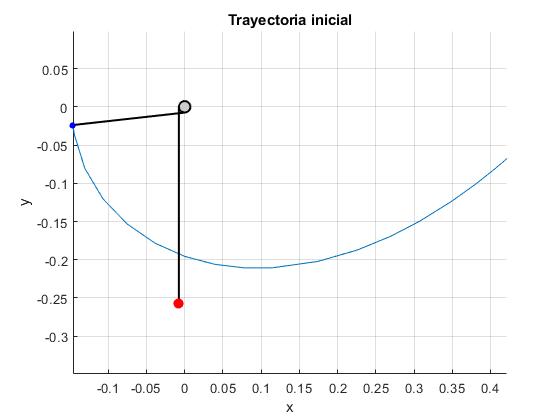
Los resultados son los siguientes:
- Tiempo hasta que el cuerpo se detiene, t1=0.3183 s
- Longitud de la porción de cuerda que une la partícula y la varilla, l1=0.1477 m
- Posición angular de la partícula, φ1=3.0305 (173.6°)
- Con estos dos datos, deducimos la altura del cuerpo, h=l0-l-R(π/2+φ)=0.2577 m
- Velocidad angular (dφ/dt)1=28.4082 rad/s
- Posición final de la partícula: x1=-0.1460 m, y1=-0.0238 m, punto de color azul al final de la trayectoria, a la izquierda de la figura
El cuerpo en reposo
En la página titulada Movimiento de una partícula atada a una cuerda que se enrolla en un cilindro horizontal (II), hemos estudiado este caso. Reproducimos los resultados más importantes obtenidos en dicha página
La ecuación diferencial del movimiento de la partícula es
La energía de la partícula es
La tensión de la cuerda es
Donde l0=l1+Rφ1=0.1705 m es la longitud de la cuerda que se considera
Tensión de la cuerda
A medida que se enrolla la cuerda en la varilla, aumenta la velocidad angular dφ/dt, aumenta por tanto, la tensión T1. Podría llegar un momento en el que se cumpliese que , la cuerda empezaría a deslizar sobre la varilla y el cuerpo de masa M se movería hacia arriba.
En la ecuación de la energía despejamos la velocidad angular dφ/dt. E es la energía de la partícula en el instante t1. Representamos la tensión T1/m en función del ángulo φ>φ1 y lo comparamos con la máxima
function looping_1
M=6.49; %masa
th_0=0.1765; %ángulo inicial
L0=0.44; %longitud cuerda
mu=0.195; %coeficiente cinético
R=0.0075; %radio
opts=odeset('events',@stop_cuerda);
[~,x]=ode45(@cuerda,[0,5],[L0-R*(pi/2+th_0),0,th_0,0], opts);
lon=x(end,1)+R*x(end,3);
E=(lon-R*x(end,3))^2*x(end,4)^2/2+9.8*(R*cos(x(end,3))-
(lon-R*x(end,3))*sin(x(end,3)));
T=@(z) 9.8*sin(z)+2*(E-9.8*(R*cos(z)-(lon-R*z).*sin(z)))./(lon-R*z);
hold on
fplot(T,[x(end,3),x(end,3)+x(end,1)/R]);
fplot(@(x) M*9.8*exp(mu*(pi/2+x)),[x(end,3),x(end,3)+x(end,1)/R]);
line([x(end,3)+x(end,1)/R,x(end,3)+x(end,1)/R],[0,7500],'color','k',
'lineStyle','--')
ylim([0,7500])
hold off
grid on
legend('T_1','T_{máx}','Location','best')
xlabel('x')
ylabel('T_1/m');
title('Tensión')
% x(1) es l, x(3) es phi
function dr=cuerda(~, x)
xi=M*exp(-mu*(x(3)+pi/2));
a1=(xi+1)*R*cos(x(3))-x(1)*sin(x(3));
a2=(xi+1)*R*sin(x(3))+x(1)*cos(x(3));
b1=(xi+1)*cos(x(3));
b2=(xi+1)*sin(x(3));
c1=-xi*9.8*cos(x(3))+(R*sin(x(3))+x(1)*cos(x(3)))*x(4)^2+
2*sin(x(3))*x(4)*x(2);
c2=9.8-xi*9.8*sin(x(3))-(R*cos(x(3))-x(1)*sin(x(3)))*x(4)^2-
2*cos(x(3))*x(4)*x(2);
den=a1*b2-a2*b1;
dr=[x(2);(a1*c2-a2*c1)/den;x(4);(c1*b2-c2*b1)/den];
end
function [value,isterminal,direction]=stop_cuerda(t,x)
%x(1) es x, x(3) es y
dh=-R*x(4)-x(2); %velocidad de la masa M
value=dh;
isterminal=1;
direction=-1; % 1 crece, -1 decrece, 0 no importa
end
end
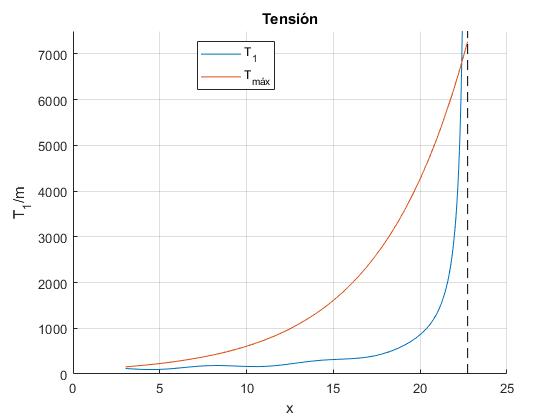
Como apreciamos en la gráfica, T1≥Tmáx, la cuerda empieza a deslizar, o el cuerpo empieza a moverse hacia arriba, un poquito antes de que se encuentre completamente enrollada en la varilla, posición angular de la línea a trazos
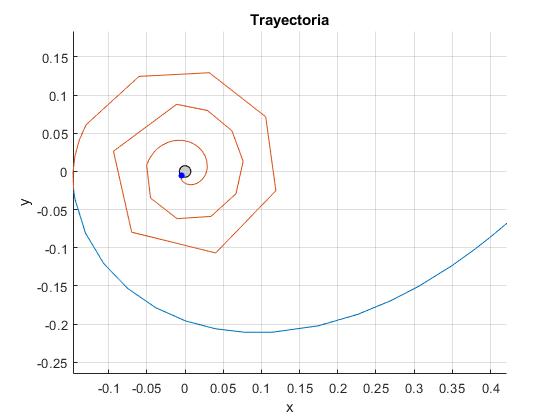
Movimiento de la partícula con el cuerpo en reposo
Representamos la trayectoria completa de la partícula resolviendo la ecuación diferencial del movimiento (cuerpo en reposo), con las siguientes condiciones iniciales:
- En el instante t1
- La posición angular inicial φ1
- La velocidad angular inicial (dφ/dt)1
Se detiene el procedimiento cuando la cuerda se ha enrollado completamente en la varilla
function looping
M=6.49; %masa
th_0=0.1765; %ángulo inicial
L0=0.44; %longitud cuerda
mu=0.195; %coeficiente cinético
R=0.0075; %radio
%primera etapa
opts=odeset('events',@stop_cuerda);
[t,x]=ode45(@cuerda,[0,5],[L0-R*(pi/2+th_0),0,th_0,0], opts);
X=R*sin(x(:,3))+x(:,1).*cos(x(:,3));
Y=R*cos(x(:,3))-x(:,1).*sin(x(:,3));
hold on
plot(X,Y)
%segunda etapa
lon=x(end,1)+R*x(end,3); %longitud inicial
E0=(lon-R*x(end,3))^2*x(end,4)^2/2+9.8*(R*cos(x(end,3))-
(lon-R*x(end,3))*sin(x(end,3)));
x0=[x(end,3),x(end,4)]; %condiciones iniciales
tIni=t(end); %tiempo inicial
f=@(t,x) [x(2); (9.8*cos(x(1))+R*x(2)^2)/(lon-R*x(1))];
opts=odeset('events',@stop_cuerda_1);
[~,x]=ode45(f,[tIni,2],x0, opts);
X=R*sin(x(:,1))+(lon-R*x(:,1)).*cos(x(:,1));
Y=R*cos(x(:,1))-(lon-R*x(:,1)).*sin(x(:,1));
plot(X,Y)
E=(lon-R*x(:,1)).^2.*x(:,2).^2/2+9.8*(R*cos(x(:,1))-
(lon-R*x(:,1)).*sin(x(:,1))); %energía
z=0:pi/40:2*pi;
fill(R*sin(z),R*cos(z),[0.8 0.8 0.8])
plot(X(end),Y(end),'bo','markersize',4,'markeredgecolor','b',
'markerfacecolor','b')
hold off
grid on
axis equal
xlabel('x')
ylabel('y');
title('Trayectoria')
% x(1) es l, x(3) es phi
function dr=cuerda(~, x)
xi=M*exp(-mu*(x(3)+pi/2));
a1=(xi+1)*R*cos(x(3))-x(1)*sin(x(3));
a2=(xi+1)*R*sin(x(3))+x(1)*cos(x(3));
b1=(xi+1)*cos(x(3));
b2=(xi+1)*sin(x(3));
c1=-xi*9.8*cos(x(3))+(R*sin(x(3))+x(1)*cos(x(3)))*x(4)^2+
2*sin(x(3))*x(4)*x(2);
c2=9.8-xi*9.8*sin(x(3))-(R*cos(x(3))-x(1)*sin(x(3)))*x(4)^2-
2*cos(x(3))*x(4)*x(2);
den=a1*b2-a2*b1;
dr=[x(2);(a1*c2-a2*c1)/den;x(4);(c1*b2-c2*b1)/den];
end
function [value,isterminal,direction]=stop_cuerda(t,x)
%x(1) es x, x(3) es y
dh=-R*x(4)-x(2); %velocidad de la masa M
value=dh;
isterminal=1;
direction=-1; % 1 crece, -1 decrece, 0 no importa
end
function [value,isterminal,direction]=stop_cuerda_1(t,x)
%x(1) es x, x(3) es y
X=R*sin(x(1))+(lon-R*x(1)).*cos(x(1));
Y=R*cos(x(1))-(lon-R*x(1)).*sin(x(1));
value=sqrt(X^2+Y^2)-R; %choca con la varilla
isterminal=1;
direction=-1; % 1 crece, -1 decrece, 0 no importa
end
end
Comprobamos el principio de conservación de la energía en la segunda etapa del movimiento
8.5745 %inicial
...
8.5537
8.5503
8.5528
El procedimiento
Warning: Failure at t=6.738177e-01. Unable to meet integration tolerances without reducing the step size below the smallest value allowed (1.776357e-15) at time t.
Aquí se completa la descripción de la demostración mecánica sorpendente, sin embargo, este sistema admite otras posiblidades, dependiendo de la relación de masas M/m, el radio R de la varilla o el coeficiente estático μs y cinético μk y la longitud de la cuerda l0
El cuerpo asciende
Si se cumple que , el cuerpo empieza a desplazarse hacia arriba, hasta que se detiene.
Cuando la cuerda desliza sobre la varilla la relación entre las tensiones es
El único efecto en el sistema de dos ecuaciones diferenciales que describe el movimiento de la partícula es el cambio en el parámetro ξ del término μk por -μk
Se resuelve el sistema de dos ecuaciones diferenciales por procedimientos numéricos con las siguientes condiciones iniciales
- En el instante t2
- La posición angular de la partícula es φ2
- La velocidad angular de la partícula es (dφ/dt)2
- La longitud de la cuerda que une la varilla con la partícula es l=l0-R(π/2+φ2)-h
- La velocidad (dl/dt)2=-R(dφ/dt)2
Se detiene el procedimiento cuando la velocidad del cuerpo es nula dh/dt=-dl/dt-Rdφ/dt=0
Ejemplo
Consideremos el siguiente sistema
- Cociente de las masas, M/m=6.49
- Longitud de la cuerda, l0=1 m
- Radio de la varilla cilíndrica, R=0.075 m
- Coeficiente cinético, μk=0.195
Vamos a describir las etapas del movimiento del cuerpo de masa M y de la partícula de masa m
Primera etapa del movimiento, el cuerpo desciende
Primero, verificamos que la cuerda desliza sobre la varilla cilíndrica
M=6.49; %masa
th_0=0.1765; %ángulo inicial
L0=1; %longitud cuerda
mu=0.195; %coeficiente cinético
R=0.075; %radio
if M<sin(th_0)*exp(mu*(pi/2+th_0))
disp([M,sin(th_0)*exp(mu*(pi/2+th_0))])
return;
end
...
196.9959 152.9038
A continuación, se resuelve el sistema de dos ecuaciones diferenciales por el procedimiento
Condiciones iniciales
- Ángulo inicial, φ0=0.1765 (10.1°), por debajo de la horizontal
- La partícula se suelta, dφ/dt=0
- Altura inicial del cuerpo, h=0
- Longitud inicial l=l0-R(π/2+φ0) de la porción de cuerda que une la partícula y el cilindro y que es tangente al mismo
- Si el cuerpo se suelta, dh/dt=0, por lo que dl/dt=0
...
opts=odeset('events',@stop_cuerda);
[~,x]=ode45(@cuerda,[0,2],[L0-R*(pi/2+th_0),0,th_0,0],opts);
X=R*sin(x(:,3))+x(:,1).*cos(x(:,3));
Y=R*cos(x(:,3))-x(:,1).*sin(x(:,3));
hold on
plot(X,Y)
...
Los resultados son los siguientes:
- Tiempo hasta que el cuerpo se detiene, t1=0.4189 s
- Longitud de la porción de cuerda que une la partícula y la varilla, l1=0.1821 m
- Posición angular de la partícula, φ1=2.9275 (167.7°)
- Con estos dos datos, deducimos la altura del cuerpo, h=l0-l-R(π/2+φ)=0.4805 m
- Velocidad angular (dφ/dt)1=32.7127 rad/s
- Posición final de la partícula: x1=-0.1620 m, y1=-0.1120 m
Segunda etapa del movimiento
Calculamos la tensión T1 de la porción de cuerda de longitud l0=l1+Rφ1, cuando el cuerpo está en reposo, entonces la tensión T2=Mg
...
lon=x(end,1)+R*x(end,3);
T1=9.8*sin(x(end,3))+(lon-R*x(end,3))*x(end,4)^2;
disp([T1,M*9.8*exp(mu*(pi/2+x(end,3)))])
...
196.9959 152.9038
Como apreciamos T1 es mayor que la , la cuerda desliza y el cuerpo asciende
A continuación, se resuelve el sistema de dos ecuaciones diferenciales por el procedimiento
Las condiciones iniciales son las finales del sistema anterior
...
mu=-mu;
opts=odeset('events',@stop_cuerda_1);
[t,x]=ode45(@cuerda,[0,5],[x(end,1),x(end,2),x(end,3),x(end,4)], opts);
X=R*sin(x(:,3))+x(:,1).*cos(x(:,3));
Y=R*cos(x(:,3))-x(:,1).*sin(x(:,3));
plot(X,Y)
...
Unimos las porciones de código, para dibujar la trayectoria de la partícula
function looping_4
M=6.49; %masa
th_0=0.1765; %ángulo inicial
L0=1; %longitud cuerda
mu=0.195; %coeficiente cinético
R=0.075; %radio
if M<sin(th_0)*exp(mu*(pi/2+th_0))
disp([M,sin(th_0)*exp(mu*(pi/2+th_0))])
return;
end
opts=odeset('events',@stop_cuerda);
[t,x]=ode45(@cuerda,[0,2],[L0-R*(pi/2+th_0),0,th_0,0],opts);
X=R*sin(x(:,3))+x(:,1).*cos(x(:,3));
Y=R*cos(x(:,3))-x(:,1).*sin(x(:,3));
hold on
plot(X,Y)
lon=x(end,1)+R*x(end,3);
T1=9.8*sin(x(end,3))+(lon-R*x(end,3))*x(end,4)^2;
%disp([T1,M*9.8*exp(mu*(pi/2+x(end,3)))])
tIni=t(end);
mu=-mu;
opts=odeset('events',@stop_cuerda_1);
[t,x]=ode45(@cuerda,[tIni,5],[x(end,1),x(end,2),x(end,3),x(end,4)], opts);
X=R*sin(x(:,3))+x(:,1).*cos(x(:,3));
Y=R*cos(x(:,3))-x(:,1).*sin(x(:,3));
plot(X,Y)
plot(X(end),Y(end),'bo','markersize',4,'markeredgecolor',
'b','markerfacecolor','b')
z=0:pi/40:2*pi;
fill(R*sin(z),R*cos(z),[0.8 0.8 0.8])
fplot(@(z) R*cos(z), @(z) R*sin(z), [-x(end,3),pi],
'lineWidth',1.5,'color','k')
h=L0-x(end,1)-R*(x(end,3)+pi/2);
line([-R,-R],[0,-h], 'lineWidth',1.5,'color','k')
plot(-R,-h,'ro','markersize',7,'markeredgecolor','r',
'markerfacecolor','r')
line([R*sin(x(end,3)),X(end)],[R*cos(x(end,3)), Y(end)],
'lineWidth',1.5,'color','k')
hold off
grid on
axis equal
xlabel('x')
ylabel('y');
title('Trayectoria inicial')
% x(1) es l, x(3) es phi
function dr=cuerda(~, x)
xi=M*exp(-mu*(x(3)+pi/2));
a1=(xi+1)*R*cos(x(3))-x(1)*sin(x(3));
a2=(xi+1)*R*sin(x(3))+x(1)*cos(x(3));
b1=(xi+1)*cos(x(3));
b2=(xi+1)*sin(x(3));
c1=-xi*9.8*cos(x(3))+(R*sin(x(3))+x(1)*cos(x(3)))*x(4)^2+
2*sin(x(3))*x(4)*x(2);
c2=9.8-xi*9.8*sin(x(3))-(R*cos(x(3))-x(1)*sin(x(3)))*x(4)^2-
2*cos(x(3))*x(4)*x(2);
den=a1*b2-a2*b1;
dr=[x(2);(a1*c2-a2*c1)/den;x(4);(c1*b2-c2*b1)/den];
end
function [value,isterminal,direction]=stop_cuerda(~,x)
%x(1) es x, x(3) es y
dh=-R*x(4)-x(2); %velocidad de la masa M
value=dh;
isterminal=1; %1 detiene la integración cuando la velocidad se hace cero
direction=-1; % 1 crece, -1 decrece, 0 no importa
end
function [value,isterminal,direction]=stop_cuerda_1(~,x)
%x(1) es x, x(3) es y
X=R*sin(x(3))+x(1).*cos(x(3));
Y=R*cos(x(3))-x(1).*sin(x(3));
value=sqrt(X^2+Y^2)-R;
isterminal=1; %1 detiene la integración cuando la velocidad se hace cero
direction=-1; % 1 crece, -1 decrece, 0 no importa
end
end
En azul, la trayectoria de la partícula cuendo el cuerpo desciende, en rosa, cuando el cuerpo asciende (se desplaza muy poco hacia arriba)
Actividades
Se introduce
- La longitud l0 de la cuerda en m, en el control titulado Longitud
- El radio R de la varilla cilíndrica fija en m, en el control titulado Radio
- El cociente de las masas M/m del cuerpo que cuelga y de la partícula, en el control titulado Masa
- Se ha fijado el coeficiente estático y cinético, μs=μk=0.195
- Se ha fijado el ángulo inicial de la cuerda que hace con la dirección horizontal φ0=0.1765 (10.1°)
Aunque se trata de us sistema físico sencillo, el cálculo mediante el procedimiento de Runge-Kutta es muy complicado, por lo que es posible que algunas situaciones no se simulen adecuadamente
Se aconseja al lector probar estas situaciones
- Longitud, l0=0.44 m, radio R=0.0075 m, masa, M/m=6.49
- Longitud, l0=1 m, radio R=0.075 m, masa, M/m=6.49
- Longitud, l0=1 m, radio R=0.075 m, masa, M/m=2
El primer caso, corresponde a la sorprendente demostración mecánica
En la parte superior izquierda, se muestra el tipo de movimiento:
- tipo 1, el cuerpo que cuelga (en color rojo) en movimiento, hacia abajo, aunque también puede ser hacia arriba después de haberse desplazado
- tipo 2, el cuerpo que cuelga en reposo
Cuando el cuerpo está en reposo, la energía se conserva. El programa calcula en cada instante el tanto por ciento de error relativo en la energía o el cociente
donde E es la energía en cualquier instante t y E0 es la energía inicial.
En la parte derecha, se muestran los datos de
- El tiempo, t
- La posición de la partícula (en azul), (x, y)
- El ángulo φ en radianes
- La altura h del cuerpo por debajo del origen, que mide la regla situada a la izquierda
- La velocidad dh/dt de dicho cuerpo, cuando se desplaza hacia abajo la velocidad es positiva, hacia arriba es negativa.
Cuando la partícula está cerca de la varilla, las aceleraciones son muy grandes y los errores de cálculo se acrecientan, tal como puede comprobarse en la parte inferior derecha
Referencias
Qinghao Wen, Xiucai Huang, Yansheng Zhang, Etienne Ong. Looping pendulum: theoretical and experimental studies. Eur. J. Phys. 42 (2021) 014001
A. R. Marlow. A surprising mechanics demonstration. Am. J. Phys. 59, (10) October 1991, pp. 951-952.
David J. Griffiths. Comment on "A surprising mechanics demonstration," by A. R. Marlow [Am. J. Phys. 59, 951-952 (1991)]. Am. J. Phys. 60 (10) October 1992, pp. 951-953
R. E. J. Sears. Comment on "A surprising mechanics demonstration," by A. R. Marlow [Am. J. Phys. 59, 951-952 (1991)]. Am. J. Phys. 63 (9) September 1995, pp. 854-855
Problems for IYPT 2019 Poland, n° 14. International Young Physicists' Tournament 2019. Warsaw University of Technology